1. Batch Normalization
- 내부 공변량 변화를 줄이기 위해 사용
1.1 수식 정의
-
미니배치 평균과 분산 계산
주어진 미니배치에서 평균과 분산을 계산한다. -
평균:
-
분산: (여기서 은 미니배치의 크기)
-
정규화: 계산된 평균과 분산을 사용하여 입력을 정규화한다. 정규화된 값은 다음과 같다.
(여기서 은 수치적 안정성을 위한 작은 상수) -
스케일링 및 이동: 정규화된 값에 학습 가능한 파라미터인 스케일 파라미터 와 이동 파라미터 를 적용한다.
Batch Normalization 같은 경우, 각 시점(time step)마다 다른 데이터가 연속적으로 나오는 sequential 한 형태의 데이터의 경우 배치 정규화를 적용시키기 어렵다.
미니배치 내 데이터의 평균과 분산을 기반으로 정규화하는 Batch Normalization은 시계열 데이터에서 각 시점의 데이터의 분포를 상이하게 만들 수 있고 이는 일관되지 않은 학습 결과를 만들어 낼 수 있기 때문이다. 또한, 시간적 의존성을 무시하고 각 시점의 데이터를 독립적으로 처리하기에 sequential 데이터의 특성을 제대로 반영하지 못할 수 있다. 예를 들어, 주식처럼 시간의 흐름이 중요한 데이터의 경우에는 단순히 정규화를 진행하면 안된다. 그래서 등장한 것이 Layer Normalization이다.
- Batch Normalization은 데이터의 특성(feature) 단위로 평균과 표준편차를 구한다면, Layer Normalization은 data sample 단위로 평균과 표준 편차를 구하는 것을 의미한다.
- features : 데이터의 특성 (variables) / data sample : 데이터의 관측치
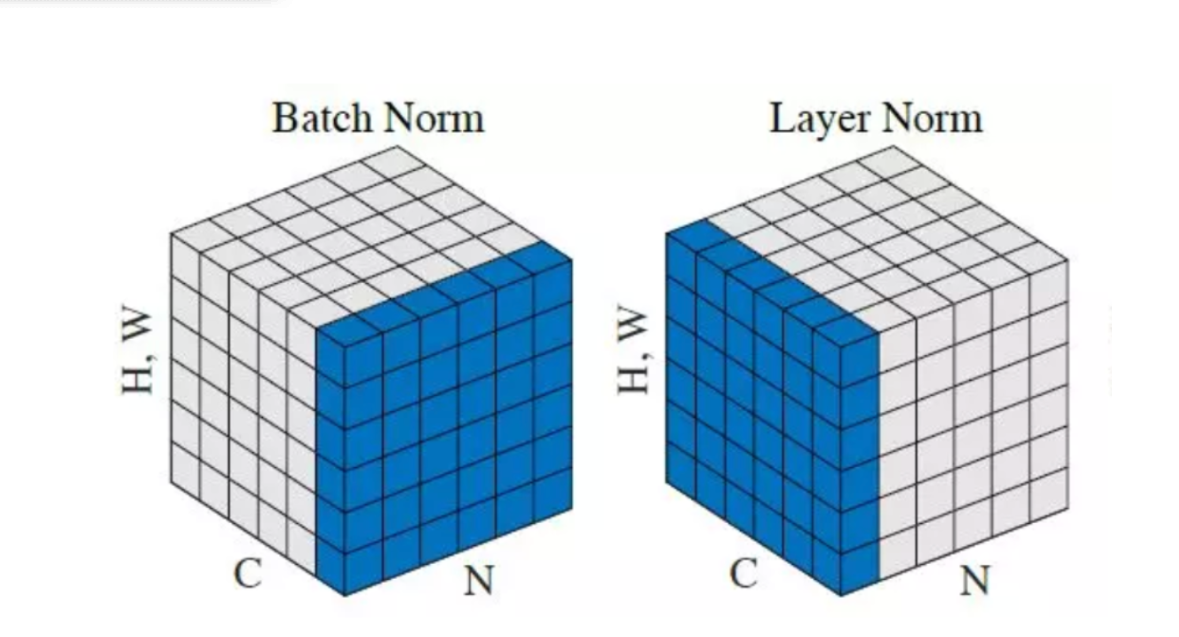
위 그림을 바탕으로 Batch Normalization과 Layer Normalization의 차이를 확인해보면
(N : 미니배치의 차원 / C : 채널 차원)
-
위 그림에서 보면, Batch Normalization은 서로 다른 관측치(C)에 대해서 특성(N)별 Normalization을 수행하는것이고
-
Layer Normalization은 서로 다른 특성(N)에 대해 같은 관측치(C)에 대해 Normalization을 수행하는 것이다.

A. Batch Normalization
Batch Normalization은 각 특성별로 정규화를 수행
특성 1에 대한 정규화
평균: (2 + 4 + 6 + 8) / 4 = 5
분산: ((2-5)² + (4-5)² + (6-5)² + (8-5)²) / 4 = 5
A: (2 - 5) / √5 = -1.34
B: (4 - 5) / √5 = -0.45
C: (6 - 5) / √5 = 0.45
D: (8 - 5) / √5 = 1.34
특성 2와 3에 대해서도 동일하게 진행한다.
B. Layer Normalization
Layer Normalization은 각 샘플에 대해 모든 특성을 동시에 정규화
샘플 A에 대한 정규화
평균: (2 + 3 + 4) / 3 = 3
분산: ((2-3)² + (3-3)² + (4-3)²) / 3 = 0.67
A의 특성 1: (2 - 3) / √0.67 = -1.22
A의 특성 2: (3 - 3) / √0.67 = 0
A의 특성 3: (4 - 3) / √0.67 = 1.22
샘플 B, C, D에 대해서도 동일하게 진행한다.
2. Layer Normalization
- 신경망의 각 층에서 입력 데이터의 정규화를 수행한다.
- 내부 공변량 이동문제를 해결하기 위해 고안된 정규화 기법이다.
2.1 수식 정의
-
입력 벡터:
-
평균:
-
분산:
-
정규화:
(여기서 은 분모가 0이 되는 것을 방지하기 위한 상수) -
스케일링 및 이동:
와 는 학습 가능한 파라미터 -
결과:
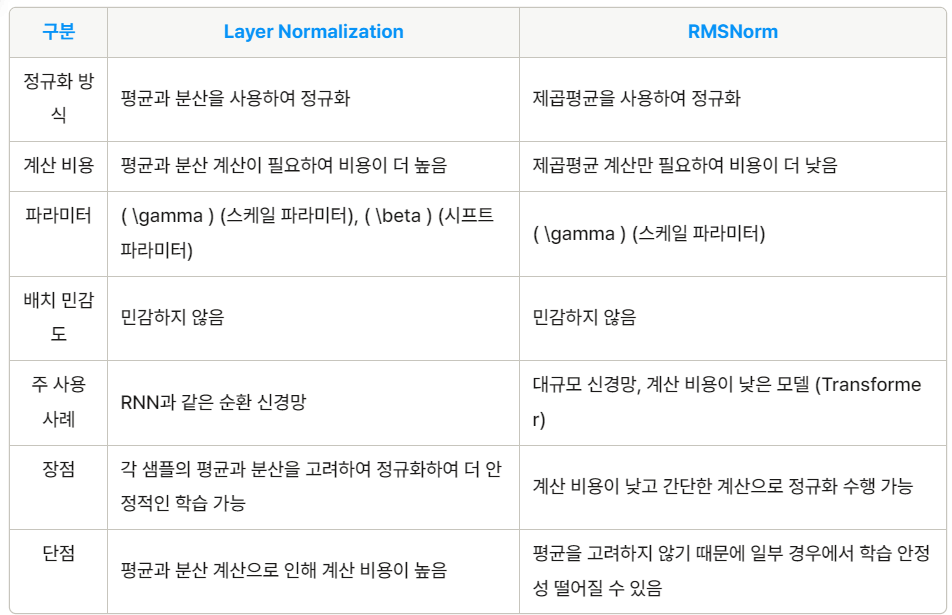
각 배치마다 평균과 분산을 계산해야 하므로 계산 비용이 증가한다. RNN과 같은 순차적 모델에서는 각 타임 스텝에서 정규화를 적용해야 하므로 오버헤드가 발생할 수 있다.
3. RMSNorm (Root Mean Square Normalization)
-
Layer Normalization과 유사하게 신경망의 입력을 정규화하는 방법
-
다만, RMSNorm은 각 입력의 평균과 분산을 고려하는 대신, 입력의 제곱평균을 사용하여 정규화를 수행
3.1 수식 정의
-
입력 벡터:
-
제곱 평균 계산
제곱 평균:
분산 계산 (없음 LN과의 차이, 제곱평균이기에 가능)
- 정규화:
(여기서 은 분모가 0이 되는 것을 방지하기 위한 작은 상수) - 스케일링 및 이동 :
RMSNorm에서는 일반적으로 시프트 파라미터 를 사용하지 않고, 스케일링 파라미터 만을 사용하여 정규화된 값에 대해 스케일링을 수행 - 출력: 𝑦=[𝑦1,𝑦2,...,𝑦𝑑]
4. 코드
A. LN (Layer Normalization)
import torch
import torch.nn as nn
# Define a LayerNorm layer
layer_norm = nn.LayerNorm(normalized_shape)
# Apply LayerNorm to the output of a layer
normalized_output = layer_norm(output)B. RMSNorm
import torch
import torch.nn as nn
class RMSNorm(nn.Module):
def __init__(self, normalized_shape, eps=1e-8):
super(RMSNorm, self).__init__()
self.eps = eps
self.gamma = nn.Parameter(torch.ones(normalized_shape))
def forward(self, x):
rms = torch.sqrt(torch.mean(x**2, dim=-1, keepdim=True))
x_norm = x / (rms + self.eps)
return self.gamma * x_norm
# Define an RMSNorm layer
rms_norm = RMSNorm(normalized_shape)
# Apply RMSNorm to the output of a layer
normalized_output = rms_norm(output)출처: https://github.com/bzhangGo/rmsnorm