RL- Markov Decision Process
1. Introduction
Core Concept of Reinforcement
- concept is the strengthening of a behavior pattern
- pleasure oriented
- subfield of AI and Machine Learning
- Key Component of Reinforcement Learning
- Agent : 학습을 시키는 주체
- Environment : 주어진 환경
- State : 환경의 상태
- Action : agent가 선택한 행동
- Reward : agent가 action을 한 이후의 보상
- Policy : 상황이 주어졌을때 어떻게 행동해야 할지에 대한 것
- Value function : state에 대한 평가를 위해 예상되는 기대 reward
- 강화학습의 목표 : learn an optimal policy
- Optimal Policy : 기대되는 cumulative reward를 최대화 하는 정책
- agent는 직접 해봐야 알 수 있음
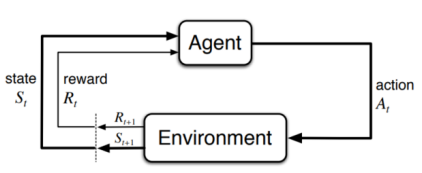
- RL loop
- agent가 현재 state에서의 environment를 observe 한다. (observation)
- observation에 기반하여, 현재 policy를 따르는 action을 선택한다.
- agent는 선택한 action을 하여 environment를 바꾼다.
- agent는 action의 결과를 통해 environment로 부터 reward와 새로운 observation을 받는다.
- agent는 reward와 observation 한 정보를 통해 knowledge(policy, value function, action-value function)를 업데이트
- 종료 조건에 도달할 때 까지 반복
2. Finite Markov Decision Process
Markov Decision Process (MDP)
- agent가 좋은 행동을 하도록 만드는 framework
- A MDP decision process
- S : state
- A : Action
- P : Probability
- state와 action이 결정되었을 때, 이 이 될 확률
- R : Reward
- 에서 를 해서 으로 갔을 때 받는 reward
- MDP goal
- policy function
- 좋은 policy를 찾기!
The Agent-Environment Interface
- trajectory :
- t-1 에서 state가 s이고 action이 a일 때 t에서 state는 s'이고 reward가 r일 확률
- 의 값은 값에만 의존한다.
- state는 미래를 위해서 과거의 agent와 environment의 상호작용에 대한 모든 정보를 가지고 있어야 한다. => Markov Property
- Markov Property를 사용하는 이유
- 과거의 모든 state를 고려하지 않고 가장 최근의 state와 action만을 이용하므로 공간을 절약할 수 있다.
- 사용 예시) chess, inventory management
- State transition and Reward function
- dynamic function :
- state-transition probability function
- expected rewards for state-action
- expected rewards for state-action-next state
3. Markov Property and State Design
- real-world problem에서는 Markov property가 적합하지 않다.
- 현재 state만 가지고 agent가 어떤 상태인지 알 수 없다. (이전 state의 내용이 필요하다)
- More information이 필요하다.
-> state 구성함에 있어서 필요한 것- snaphot of a particular point : 현재 state의 정보
- piece of information : 이전 state가 가지고 있던 데이터의 일부
- 를 구성하기 위해서 frame t-3, t-2, t-1의 정보를 사용한다면, 이전 state가 없어도 정보를 얻을 수 있다.
- More information이 필요하다.
4. MDP-Goals and Rewards
Maximizing Rewards
- Reward () : agent의 action을 수행하면 environment에서 주는 보상값(scalar)이다.
- agent는 reward를 최대로 만들기 위해 학습을 한다.
-> 이때 문제를 잘 설정하고 reward를 잘 주는 것이 가장 중요한 문제이다.
5. MDP-Returns and Episodes
Maximizing Cumulative Reward over Episodes
- RL의 목표를 long term으로 본다면, 누적된 reward를 극대화 하는 것으로 볼 수 있다.
- expected return
- (는 final step)
- Episode
- sequence of actions, states and rewards
- agent는 episode를 반복해서 좋은 결과를 찾게 된다.
- 문제점
- 예를 들어 가 둘 다 100일 때 goal 까지 가는 경로에 있어서 하나는 금방 도달했지만, 다른 하나는 돌아가서 오래 걸렸다고 했을 때, 둘 중 누가 더 좋은 방식인지 아직까지는 알 수가 없다!
6. MDP-Return Discounting
- 위에서 언급한 문제를 해결하기 위해서 discount factor가 등장한다.
- discount factor
- : 0~1의 값으로 횟수를 나타낸다.
->- discount factor가 클수록 미래에 보상에 높은 가중치를 주는 것이며, 낮을수록 단기 보상이 큰 것을 의미한다.
- discount factor를 사용하는 이유
- Modeling uncertainty
- Fast convergence
- Finite tasks
- discount factor를 사용하지 않을 때의 문제점
-> 미래와 현재 보상에 대해 같은 가중치를 부여하게 된다.- Slow convergence
- Infinite returns
- Overemphasis on long-term consequences
7. MDP-Policies and Value Functions
- Policy
- agent가 어떤 action을 선택할지 정해주는 것
- Deterministic policy
- 각 state에서 action이 정해져 있음, no randomness
- Stochastic policy
- agent가 action을 확률에 따라 선택함
- Value Function
- estimate expected cumulative rewards or expected return
- 행동의 가치를 평가하는 것 -> agent가 올바른 행동을 했는지 확인할 수 있다.
8. MDP-Value Functions
State-value function (V-function)
- 의미: state 에서 시작해서 에 따라 행동했을 때 얻는 expected return
- 예시) 도서관에 있을때의 가치
Action-value function (Q-function)
- 의미: state 에서 시작해서 action 를 하고 에 따라 행동했을 때 얻는 expected return
- 예시) 수업()이 끝나고 -> 도서관을 갔을() 때의 가치
Experience
- agent의 경험은 state, action, reward에 따라서 업데이트 된다.
- action의 결과로 state에 있어서 reward와 transition을 observe하여 value function을 더 좋은 방향으로 업데이트 한다.
- value function을 만드는데 사용하는 방식들에 MC와 TD가 있다.
Monte Carlo methods
- value function을 업데이트 하는 방식 중 하나
- MC는 완료된 episode를 통해 동작한다.
- state와 action의 수가 너무 많으면 MC는 적합하지 않다.
-> 완료된 episode를 다 확인해야 하기 때문..
Bellman Equation
