📌 BSP 개발이란?
( SoC - 커널/부트로더 - 드라이버 - App )
= ✅ 기획 - 브링업 - 안정화 - 제품 생산 - 유지보수
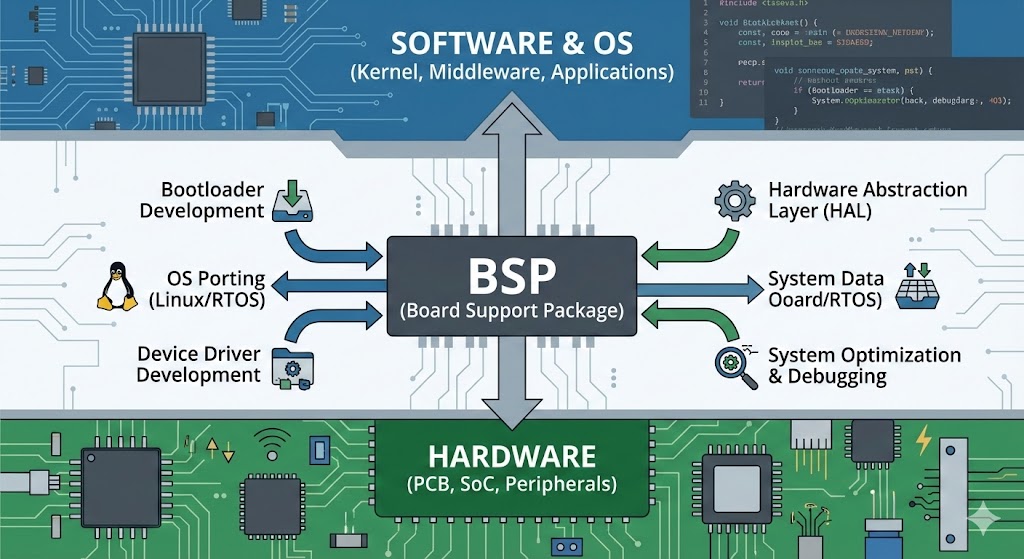
= ✅ 하드웨어와 소프트웨어를 잇는 '가교(Bridge)'
: 칩셋 벤더(Samsung, Qualcomm, NXP 등)가 만든 SoC(System on Chip)가 탑재된 보드가 '동작'할 수 있도록 생명력을 불어넣는 작업.
cf. eMMC / NAND (스토리지 정상 동작 확인), Peripheral Bring-up(센서와 포팅이 필요한 드라이버 개발) )
[ 🚀 Chap 01. 현업 프로세스 단위별 필수 기술 스택 ]

✔️ 개발 프로세스 = MT(Module Test) - DV(Design Verification) - PV(Production Validation)
: BSP 개발 과정은 크게 보드가 공장에서 갓 나왔을 때부터 리눅스가 부팅되어 애플리케이션이 돌기 직전까지를 포함합니다.
🔹 Step 1 : 하드웨어 분석 및 초기 브링업 (Bring-up)
: 전원이 인가되지 않은 '깡통' 보드를 처음 살리는 단계입니다.
-
주요 업무 : 회로도(Schematic) 분석, 전원 시퀀스 확인, 메모리(DRAM) 초기화, 부트로더 포팅.
-
필수 기술 스택
- 언어 : C 언어 (Low-level), Assembly (ARM/RISC-V 초기화 코드)
- 하드웨어 지식 : 회로도 독해 능력, Datasheet 분석, JTAG/UART 디버거 사용법, 오실로스코프/로직 분석기 활용.
- 소프트웨어 : U-Boot (가장 널리 쓰이는 부트로더), ARM Trusted Firmware (ATF).
🔹 Step 2 : 리눅스 커널 포팅 및 최적화
: 부트로더가 커널을 메모리에 로드하면, 리눅스 커널이 하드웨어 자원을 관리하도록 설정합니다.
-
주요 업무 : 커널 소스 설정(Kconfig), 디바이스 트리(Device Tree/DTS) 작성, 커널 패닉 디버깅.
-
필수 기술 스택
- Core : Linux Kernel Internals (스케줄링, 메모리 관리, 인터럽트 처리).
- Build : Cross-compiler (GCC, Toolchain), Make, Ninja.
- Config : Device Tree Overlay, Kernel Configuration.
🔹 Step 3 : 디바이스 드라이버 개발 (Peripheral)
: 카메라, 센서, 통신 모듈 등 주변 장치가 OS 위에서 동작하도록 드라이버를 작성합니다.
-
주요 업무 : I2C, SPI, UART, USB, PCIe, MIPI 등의 인터페이스 드라이버 작성 및 포팅.
-
필수 기술 스택
- Communication : I2C, SPI, UART, CAN, Ethernet, USB, PCIe 프로토콜 이해.
- Kernel API : kmalloc, ioremap, ioctl, Character/Block Device Driver 구조.
- Concurrency : Mutex, Semaphore, Spinlock (동시성 제어).
🔹 Step 4 : 파일 시스템 및 배포 환경 구성 (Build System)
: 애플리케이션 개발자가 사용할 수 있는 루트 파일 시스템(RootFS)과 SDK를 만듭니다.
-
주요 업무 : 사용자 공간(User Space) 라이브러리 구성, 배포용 이미지 생성, OTA(Over-The-Air) 업데이트 구현.
-
필수 기술 스택
- Build System : Yocto Project (현업 표준), Buildroot.
- Scripting : Shell Script (Bash), Python (Bitbake 레시피 작성용).
[ 🚀 Chap 02. BSP 개발 커리어 로드맵 ]
🔸 Step 1 : Junior (1~3년차) - "기능 구현 및 이해"
기존에 작성된 드라이버 수정 및 포팅 가능
Yocto/Buildroot를 이용해 이미지 빌드 가능
C언어 포인터 및 메모리 구조 완벽 이해
🔸 Step 2 : Middle (4~7년차) - "트러블 슈팅 및 브링업"
신규 보드 Bring-up 주도 가능
커널 패닉 및 메모리 누수 원인 분석 및 해결
복잡한 인터페이스(PCIe, MIPI, USB 3.0) 드라이버 작성
성능 최적화(부팅 시간 단축, 전력 소모 개선)
🔸 Step 3 : Senior (8년차~) - "시스템 아키텍처 및 리딩"
전체 시스템 SW 구조 설계 (보안, 가상화, OTA 포함)
SoC 선정 및 하드웨어 팀과의 협업 리딩
Mainline Kernel(오픈소스) 기여 및 Upstream 관리
Hypervisor, TrustZone 등 고급 기술 적용
[ 🚀 Chap 03. 미래 확장성 : AI & 로봇과의 연결 ]
: BSP 개발자의 미래는 단순히 보드를 켜는 것을 넘어, 지능형 엣지(Edge) 디바이스를 위한 기반을 닦는 방향으로 나아가고 있습니다.
🤝 A. AI/NPU 가속기 최적화 (Edge AI)
-
트렌드 : 요즘 SoC에는 CPU, GPU 외에 NPU(Neural Processing Unit)가 내장
-
BSP의 역할 : 단순히 OS를 올리는 것을 넘어, NPU 드라이버를 최적화하고 AI 모델(TensorFlow Lite, PyTorch 등)이 하드웨어 가속을 제대로 받도록 HAL(Hardware Abstraction Layer) 단을 구성해야 합니다.
-
필요 기술 : GPGPU(CUDA, OpenCL), NPU Driver Interface, Neural Network Compiler 구조 이해.
🤝 B. 로봇 및 자율주행 (Real-time & ROS)
-
트렌드 : 로봇은 정해진 시간 내에 반드시 응답해야 하는 실시간성(Real-time)이 중요
-
BSP의 역할 : 일반 리눅스 커널을 RT-Preempt 커널이나 Xenomai 등으로 패치하여 실시간성을 보장해야 함
-
로봇 미들웨어인 ROS2(Robot Operating System)가 하드웨어 센서 데이터에 지연 없이 접근하도록 드라이버 레벨에서 최적화가 필요.
-
필요 기술 : RTOS 개념, RT-Linux Patching, ROS2 DDS(Data Distribution Service) 통신 구조, 센서 퓨전(Sensor Fusion)을 위한 드라이버 동기화.
