고려대학교 산업공학과 정태수 교수님 강의 정리
Week5: 마르코브 결정 프로세스-1
5-1. MDP 개요
MDP
구분
- Deterministic DP: 정해진 상태로만 전이
- Stochastic DP: 상태가 확률적으로 결정
정의
- 일종의 확률과정
- 의사결정자가 확률과정을 관찰하고 행동을 선택함으로써 이후 프로세스에 영향을 미침
--> 의사결정자는 추계적 과정 상의 상태와 선택한 행동에 따른 일련의 (양 혹은 음의) 보상을 얻게 됨
MDP의 구성요소
Timespace

상태

행동

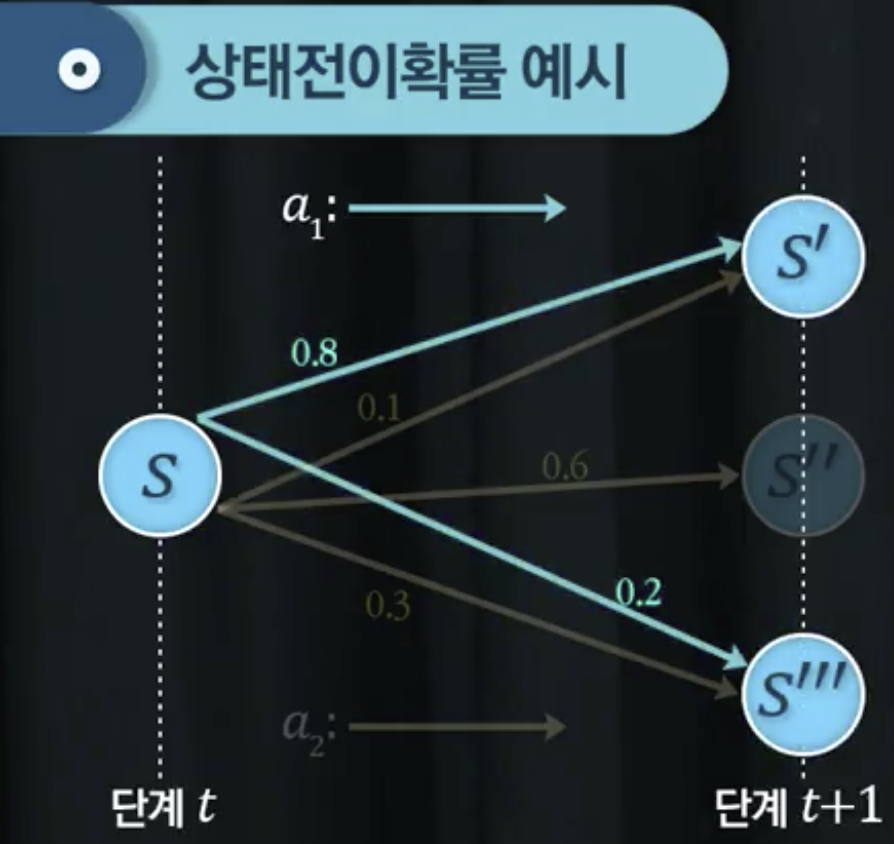
상태전이확률



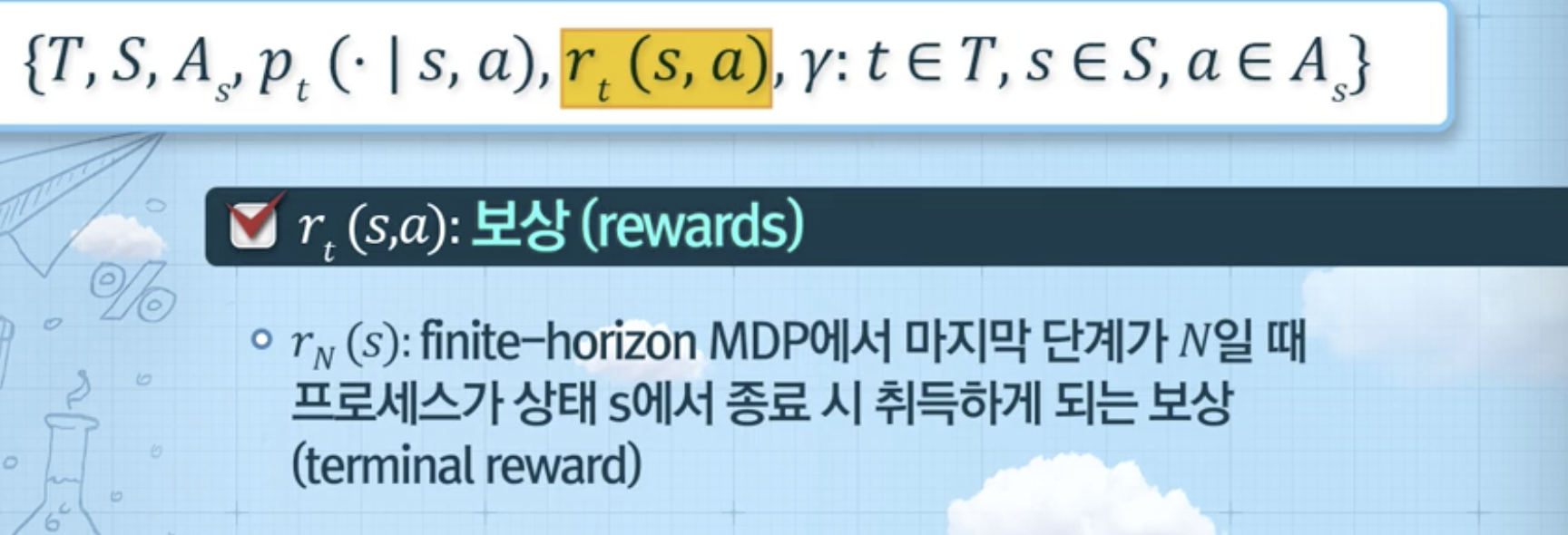
보상


감가율


MDP 정책
MDP를 통해서 얻고자 하는 것
- 매 단계마다 어떤 상태에서 어떤 행동을 해야 내가 원하는 결과(보상합 최대화)를 얻을 것인가?
--> 각 단계별로 어떤 상태에서는 어떤 행동을 취해야하는지 규칙을 찾아내는 것
의사결정규칙

- History-dependent: 과거의 모든 이력을 입력받아 다음 행동을 출력하는 함수
- Markovian: 현재 상태만으로 다음 행동을 출력하는 함수
- Deterministic: 어떤 행동을 확정하여 함수형식으로 주어짐
- Probabilistic: 어떤 행동을 확률적으로 제시함

정책

5-2. MDP 예시
MDP 예시1 (주사위 던지기 게임)
게임 규칙

MDP 정의
- Timespace: 매 라운드가 의사결정 시점의 집합이 됨
- State space:
- 게임을 진행 중인 상태: in
- 게임이 종료된 상태: end
- Action space: 게임의 상태에 따라 행동이 다름
- 게임을 진행 중인 상태
- 게임이 종료된 상태
- 상태전이확률:
- 이전 상태의 이력이 중요하지 않음 (현재 어느 상태에 있는지가 중요)
- 다음 상태가 일어날 확률을 결정함
- 모든 경우의 수가 나열되어야 함
- 보상: 어떤 상태에서 어떤 행동을 취했을 때 얻을 수 있는 기대값
상태전이 다이어그램

MDP 예시2 (재고관리)
문제 설명 및 가정

기호

MDP 정의
- Timespace: 매달이 의사결정 시점의 집합이 됨
- 상태공간: 주문 전에 보유하고 있는 재고 수준 ()
- 행동공간: 발주 전 재고수준과 창고용량을 고려한 주문량
- 최대 (M-보유량) 만큼 발주 가능 ()
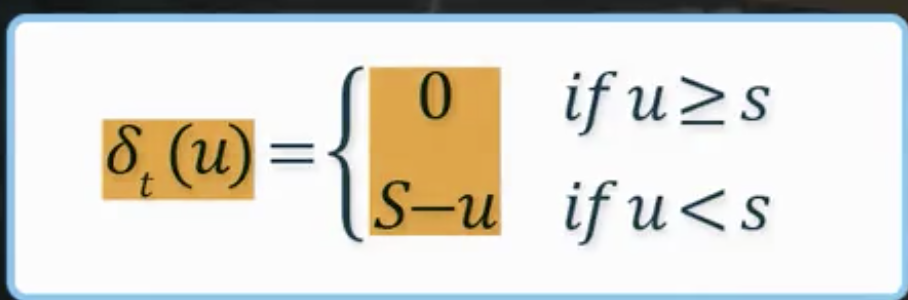
- 상태전이확률


- 보상: 이익 (수익에서 비용을 밴 차분)
- 정책 예시: 매 단계별로 모든 상태에 대해서 내가 어떤 행동을 취해야 할 지 규정하는 함수

Data Scientist, Data Analyst