
XYcar
자이카는 국내 회사 자이트론에서 제작한 자율주행 모형차이다
Xycar-D, Xycar-X, Xycar-C 모델이 있음
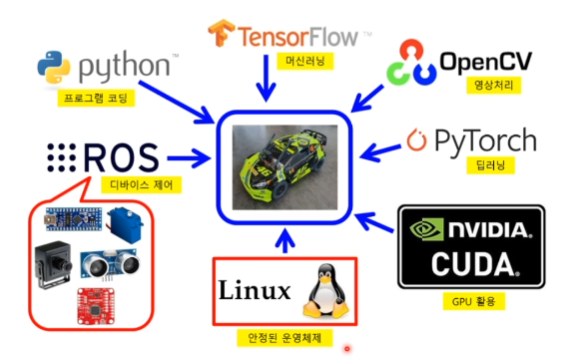
자이카 소프트웨어 구성
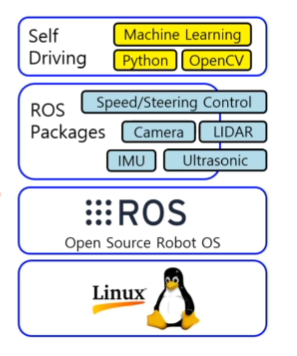
운영체제
- 리눅스가 설치되어있다(16.04 or 18.04 버전)
미들웨어
- ROS로 구성되어있다. 각종 센서와 모터제어를 한다
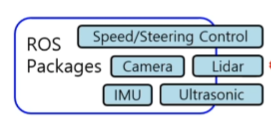
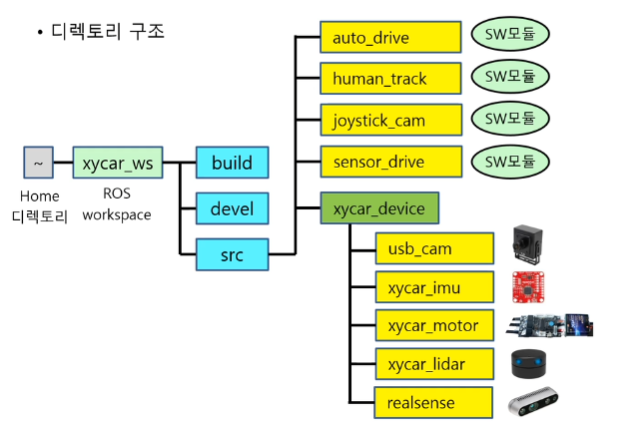
장치별 제어를 위해 위와 같은 ROS Package가 구축되어 있음
라이브러리
- 오픈소스 라이브러리를 활용해 파이썬으로 코딩할 수 있으며 머신 러닝과 영상처리를 도와주는 PyTorch, TensorFl
자이카 하드웨어 구성

1. 자동차 구동부
- 전후진 + 조향(핸들)
2. 구동모터
- 모터의 회선 속도는 공급되는 전력의 양에 따라 결정
- 배터리 전력이 모터 제어기를 거쳐 모터로 전달
- 모터의 회전력이 기어 박스를 통해 바퀴의 회전력으로 변환

3. 조향모터
-
핸들 조작을 위한 모터
- 좌우 정해진 각도 내에서 왔다갔다 왕복 동작
- 서보 모터 사용
-
PWM(Pulse Width Modulation) 신호로 모터의 회전각도를 조종
- 5V 출력을 on 혹은 off 상태로 유지하는 것이 아닌 빠르게 on/off 상태를 반복

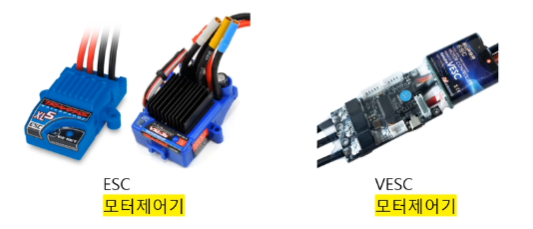
4. 모터제어기
-
ESC(Electronic Speed Controller)
- 모터 스피드 제어기
-
VESC(Vedder ESC)
- ESC 오픈소스 프로젝트 결과물로 성능을 향상
- 구동 모터의 전후진 속도 제어
- 조향모터의 좌우 회전 제어
5. ESC 모터 제어기
- ESC -> 무선조종기를 사용해 제어(RC카 조종)
- 차량의 조행속도를 조절
- 차량의 주행방향을 조절
