
개인적으로 너무 어려웠지만 비트마스킹을 적용해 볼 수 있는 기회여서 좋았다.
제출코드
파이썬
import heapq
map = []
isTrap = []
def solution(n, start, end, roads, traps):
global map, isTrap
map = [[-1] * (n+1) for _ in range(n+1)]
for p, q, s in roads:
if map[p][q] == -1:
map[p][q] = s
else:
map[p][q] = min(map[p][q], s)
isTrap = [-1] * (n+1)
tn = 0
for i in traps:
isTrap[i] = tn
tn += 1
return dijkstra(start, end, n)
def dijkstra(start, end, n):
inf = 99999999
hq = []
distance = [[inf, inf] for _ in range(n+1)] # 0 : off // 1 : on
distance[start] = [0, 0]
visitCnt = [0] * (n+1)
visitCnt[start] = 1
heapq.heappush(hq, (start, 0, 0)) # 노드 / 거리 / 트랩 상태(비트)
while hq:
now, d, t = heapq.heappop(hq)
for i in range(1, n+1):
if isRight(now, i, t) == True and map[now][i] != -1: # 정방향
k = d + map[now][i]
if isTrap[i] == -1: # 트랩이 아닌경우 별 신경 x
if distance[i][0] > k or visitCnt[i] <= 1:
if distance[i][0] > k:
distance[i][0] = k
visitCnt[i] += 1
heapq.heappush(hq, (i, k, t))
else: # 트랩인 경우 on, off 처리
new_t = switch(i, t)
if operateTrap(i, t) == False: # 트랩 off -> on
if distance[i][1] > k:
distance[i][1] = k
heapq.heappush(hq, (i, k, new_t))
else:
if distance[i][0] > k:
distance[i][0] = k
heapq.heappush(hq, (i, k, new_t))
elif isRight(now, i, t) == False and map[i][now] != -1: # 역방향
k = d + map[i][now]
if isTrap[i] == -1:
if distance[i][0] > k or visitCnt[i] <= 1:
if distance[i][0] > k:
distance[i][0] = k
visitCnt[i] += 1
heapq.heappush(hq, (i, k, t))
else:
new_t = switch(i, t)
if operateTrap(i, t) == False:
if distance[i][1] > k:
distance[i][1] = k
heapq.heappush(hq, (i, k, new_t))
else:
if distance[i][0] > k:
distance[i][0] = k
heapq.heappush(hq, (i, k, new_t))
return min(distance[end])
def isRight(i, j, t): # i -> j 방향이 정? 역?
if operateTrap(i, t) ^ operateTrap(j, t) == True:
return False # 역
return True # 정
def operateTrap(i, t): # i노드 트랩이 동작 중인가?
if isTrap[i] == -1:
return False
tn = isTrap[i]
if t & 2**tn == 0: # 트랩이 off
return False
return True
def switch(i, t): # 트랩 스위칭
tn = isTrap[i]
if operateTrap(i, t) == False:
return t + 2**tn
return t - 2**tn
접근방법
최단경로는 "다익스트라"를 이용해서 계산하고 트랩의 on/off 상태는 비트마스크로 저장한다.
트랩이 on 되는 경우 연결된 간선의 방향이 바뀌기 때문에 방향이 바뀌는 경우와 바뀌지 않는 경우를 조건 분기로 나눠야했다.
-
방향이 바뀌는 경우
- 출발점이 off 상태 - 도착점이 on 상태인 경우
- 출발점이 on 상태 - 도착점이 off 상태인 경우
-
방향이 바뀌지 않는 경우
- 출발점이 on 상태 - 도착점이 on 상태인 경우
- 출발점이 off 상태 - 도착점이 off 상태인 경우
이런 경우가 나오고 나는 XOR연산을 이용해서 처리했다. (출발점과 도착점의 상태가가 같으면 정방향이다.)
다익스트라는 기본적으로 방문한 노드라면 그 노드까지의 거리가 더 작은 값으로 갱신되지 않는 이상 힙큐에 값을 추가하지 않는데 이 경우 트랩의 on/off 상태 때문에 각각의 경우를 나눠 거리값을 저장했다. distance = [[inf, inf] for _ in range(n+1)] # 0 : off // 1 : on
여기까지 코드를 짜고 제출해봤는데 테스케이스 3번, 5번에서 오답이 나왔다.
여러가지 테케를 생각해본 결과 오답에 걸리는 테케를 찾을 수 있었는데 트랩이 아닌 노드에서도 더 높은 거리 값으로 2번 방문해야되는 경우가 있었다.
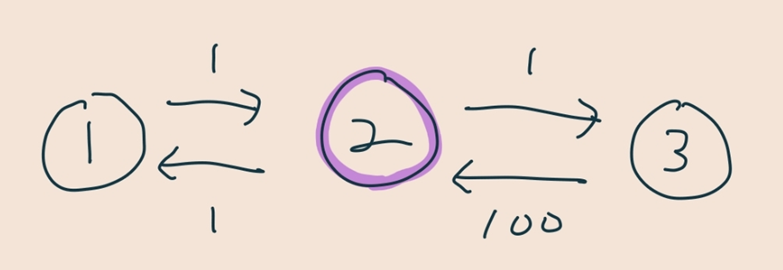
이 경우 시작 노드가 1번으로 거리배열값에는 이미 "0"이 저장되어 있지만 도착노드인 3번에 최소 경로로 가기 위해서는 1번 노드를 한번 더 들려야한다. (1 -> 2 -> 1 -> 2 -> 3)
이 테스트케이스를 찾고 한가지 가정을 했다.
"모든 노드는 거리갱신이 안 되더라도 최대 2번까지는 방문을 해봐야한다." 트랩노드인 경우는 on/off 상태값으로 이미 2번 방문하고 있고 트랩노드가 아닌 노드는 visitCnt 배열을 추가해 방문 횟수를 체크해줬다.
추가
그런데 리뷰하다보니 생각난건데 거리가 갱신된 경우는 방문횟수값을 초기화해줘야 하는게 아니었을까 하는 생각이 들었다
