앞서 포스팅했던 논문 Scheduling Algorithm for Multiprogramming in a Hard-Real-Time Environment을 읽으면서 선배와 함께 해봤던 증명을 정리한 내용이다. 사실 수식을 아직 온전히 다 옮기지 못해서 미완이다! 😅
증명 쓸 때 주의할 점
- 읽는 사람을 생각하면서 많이 풀어서 설명하기
- notation은 최대한 적게 쓰기
논문 읽을 때 주의할 점
- 해결하고자 하는 문제를 무엇으로 정의했는지
- 해당 문제를 해결하기 위해서 어떤 접근법을 사용했는지
- 나라면 어떻게 접근했을 것 같은지 생각하면서
- 증명할 때는 쉬운 케이스 general case corner case 확인
Theorem 1
Given a set of two tasks denoted as and , where denotes the period of the task , and denotes the worst-case exeucution time of the task (1 2).
Suppose that the task set is scheduled with RM (Rate-Monotonic) algorithm. If the priority of the task is higher than the priority of the task (i.e. ), then the critical point of task starts simultaneously with the task .
Proof
Assume there exist a time point where amount of the preemption by the task is larger than the point described above (simultaneously relased).
Let us suppose the amount of cumulative execution time of the task at the time point as the function , then can be represented as follows.
Here, is a variation factor for initiation time. () is initiated at times . is 0 with described case.
I'll show in every case, , which means have critical instant when initiated with .
Correctness of
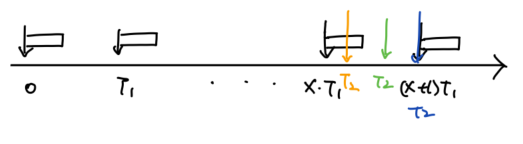
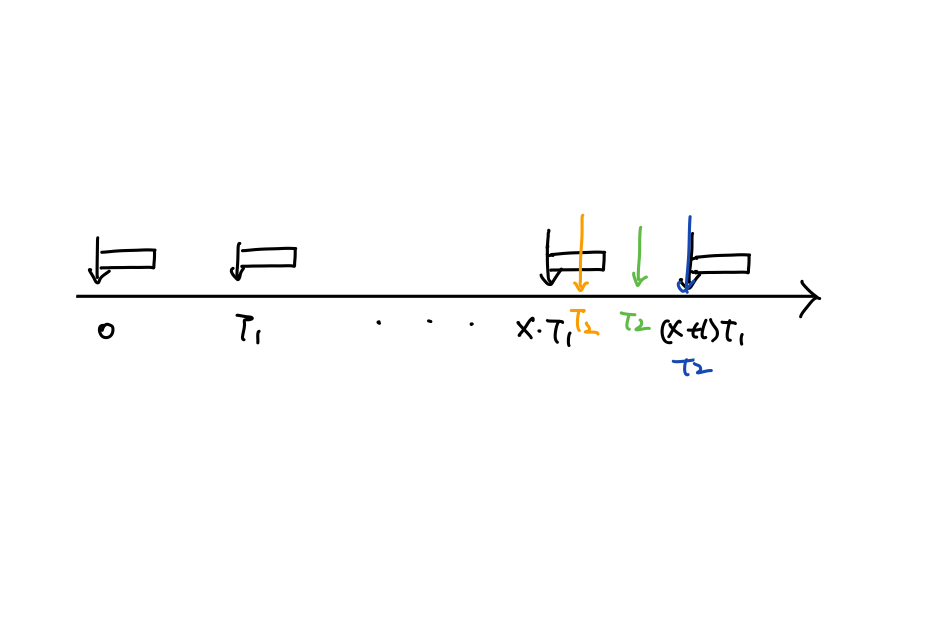
위의 그림과 같이 time 0에 task 과 가 함께 release 되었을 때 task 의 가 가질 수 있는 경우의 수는 3가지이다.
-
과 가 overlap되는 상황 (주황색)
-
과 overlap되지않는 상황 (연두색)
-
, (파란색)
-- 사실 이 케이스도 1번 케이스(주황색)으로 간주할 수 있다.
// TODO : try extending range of to and show
// TODO : add description of proof
