1. Introduction
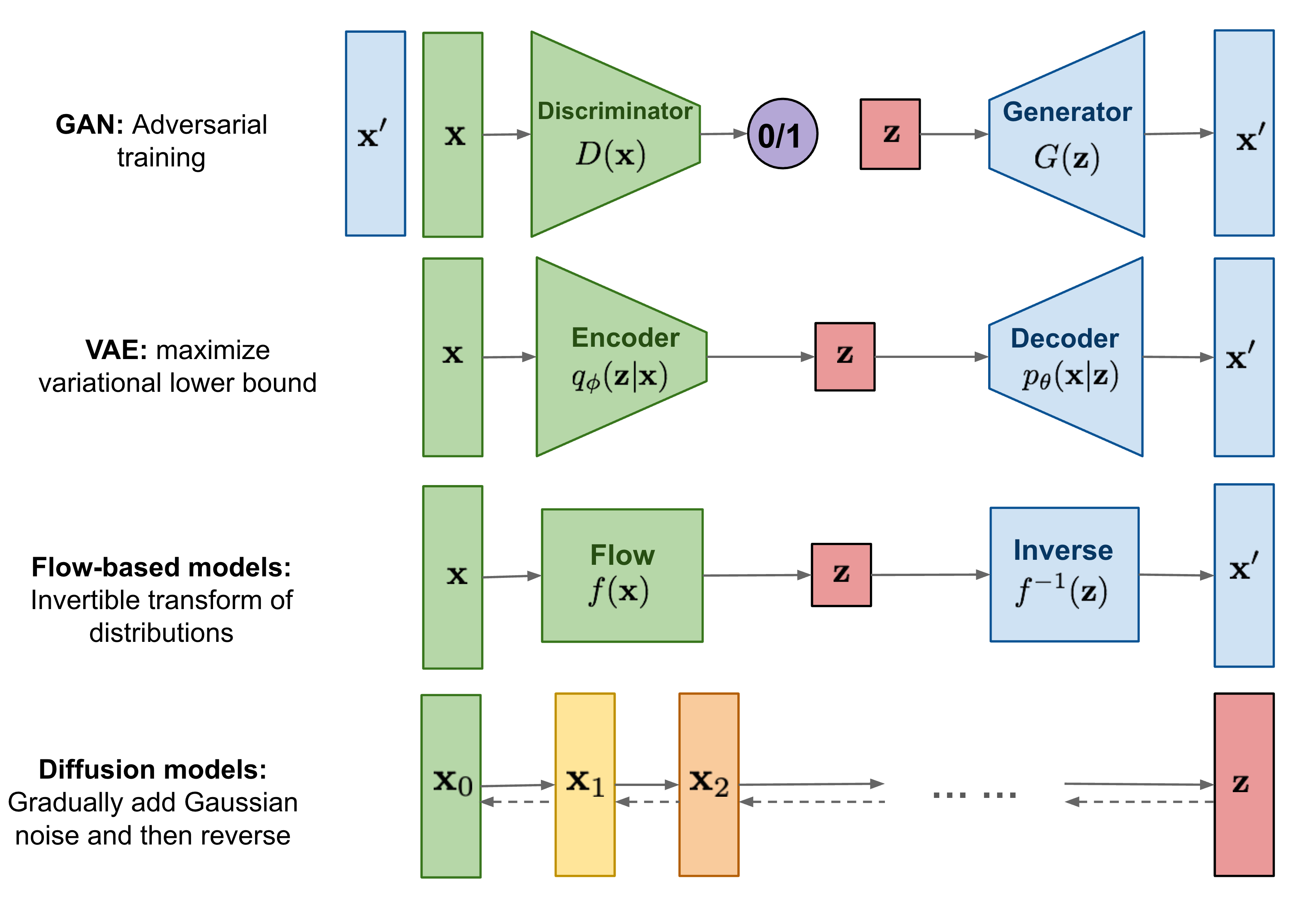
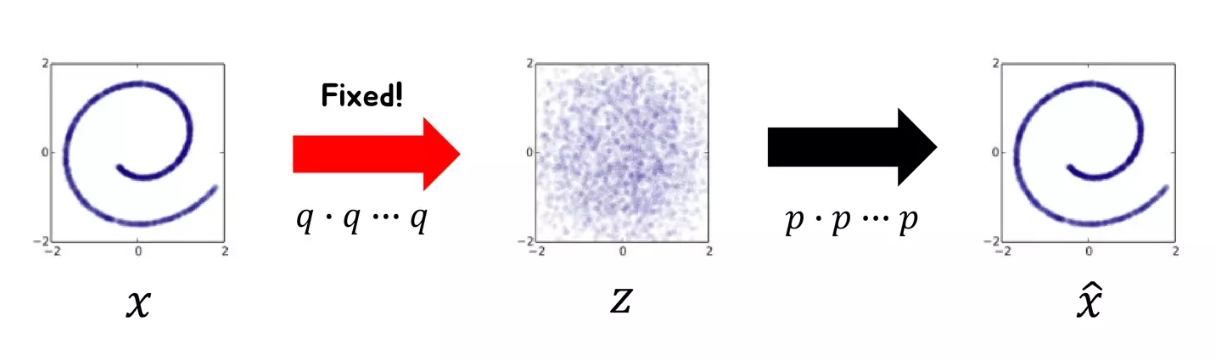
Diffusion model은 variational inference로 학습시켜 데이터를 생성하는 parameterized Markov chain. Diffusion model은 Markov가 데이터가 normal distribution의 형태를 할 때까지 noise를 더해가는 diffusion process와 이를 역으로 거치며 학습하는 reverse process로 구성됨.
Diffusion model은 정의하기 쉽고 학습시키는 것도 편리함. 또한 높은 품질의 sample(output)도 생성이 가능.
- Variational inference(변분추론): 사후확률(posterior) 분포 를 다루기 쉬운 확률분포 로 근사(approximation)하는 것
- Parameterize: 하나의 표현식에 대해 다른 parameter를 사용하여 다시 표현하는 과정. 이 과정에서 보통 parameter의 개수를 표현 식의 차수보다 적은 수로 선택(ex. 3차 표현식 --> 2개 parameter 사용)하므로, 낮은 차수로의 mapping 함수(ex. 3D --> 2D)가 생성
- Markov chain: 어떤 상태에서 다른 상태로 넘어갈 때, 바로 전 단계의 상태에만 영향을 받는 확률 과정
2. Background
2-1. Forward(diffusion) process
Markov chain으로 data에 noise를 추가하는 과정. Noise를 추가할 때 variance schedule 로 scaling을 한 후 더해준다.
- 이면 mean인 . 이전 정보를 갖지 못하고 노이즈가 증가함
- 단순히 noise만을 더해주는게 아니라 로 scaling하는 이유는 variance가 발산하는 것을 막기 위함
- : 에 noise를 추가해 을 만드는 과정
- 는 완전 destroy된 noise 상태 ~
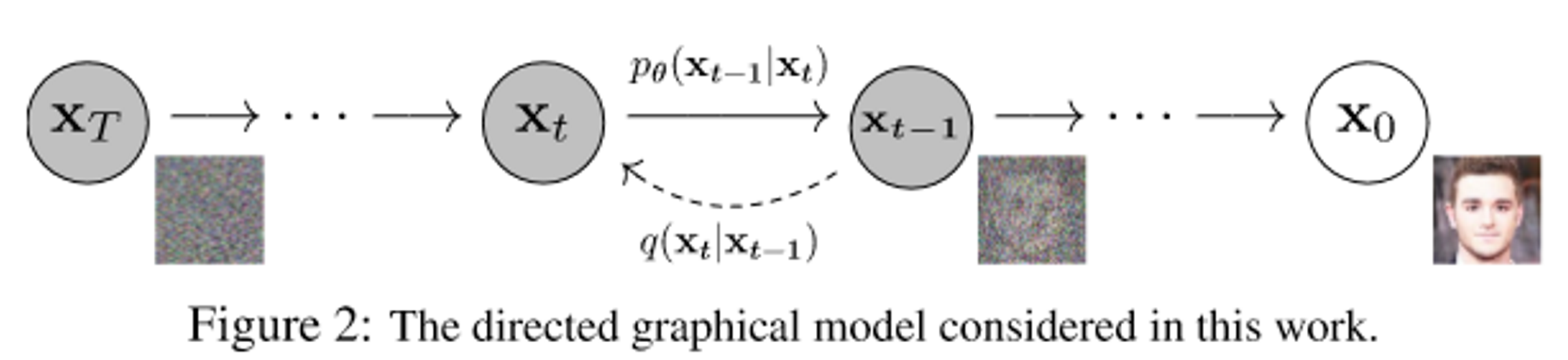
2-2. Reverse process
Reverse process로 가우시안 노이즈를 사용하는 이유는 1994년 논문에 forward process가 가우시안이면 reverse process도 가우시안으로 쓰면 된다라는 증명이 있다고 함.
여기서 우리가 해야 할 것은 를 보고 의 평균 과 분산 을 예측해내는 것.
- Hierarachical VAE에서의 decoding 과정과 비슷함
- 과 분산 는 학습 가능한 parameter
2-3. Loss Function
Diffusion model의 목적은 noise를 어떻게 제거할 것인가?이다. 가 들어왔을 때 을 예측할 수 있다면 또한 예측이 가능해짐.
본 논문에서는 negative log likelihood를 최소화하는 방향으로 진행. 위 수식을 ELBO(Evidence of Lower BOund)로 우항과 같이 정리하고 이를 풀어내면
ELBO의 역할은 우리가 관찰한 P(z|x)가 다루기 힘든 분포를 이루고 있을 때 이를 조금 더 다루기 쉬운 분포인 Q(x)로 대신 표현하려 하는 과정에서 두 분포 (P(z|x)와 Q(x))의 차이 (KL Divergence)를 최소화 하기 위해 사용된다.
와 같은 결과가 나온다.
- : Regularization term으로 를 학습시킴
- : Reconstruction term으로 매 단계에서 noise를 지우는 지움
- : Reconstruction term으로 최종 단계에서 image를 생성
3. Diffusion models and denoising encoders
DDPM에서는 inductive bias를 늘려 모델을 더 stable하고 성능도 개선할 수 있었음.
Inductive bias: 학습 모델이 지금까지 만나보지 못했던 상황에서 정확한 예측을 하기 위해 사용하는 추가적인 가정, 즉 우리가 풀려는 문제에 대한 정보를 모델에 적용하는 것
3-1. Forward process and
를 고정했더니 학습이 잘됨. 10^-4 ~ 0.02로 linear하게 image에 가까울수록 noise를 적게 주는 방식으로 설정.
따라서 에는 학습 가능한 parameter가 없어 는 0이 되기 때문에 삭제할 수 있었음.
3-2. Reverse process and
는 forward progress posterior를 예측하는 loss. 에서 noise를 더해 를 만들었을때, 그 과정을 복원 하는 과정을 학습.
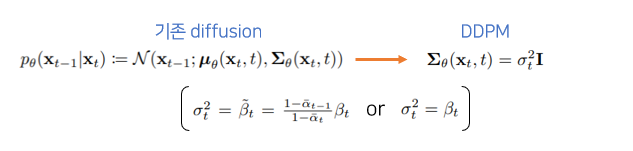
- : 를 상수로 가정했고 의 variance가 에 영향을 받기 때문에 학습시키지 않아도 된다고 생각해 variance term을 제거함.

- : DDPM에서는 를 바로 구하지 않고 residual 만 구해 정확도를 높임.
3-3. Data scaling, reverse process decoder and
[0, 255]의 image를 [-1,1] 사이로 linearly mapping. Sampling 마지막 단계에는 noise를 추가하지 않음.
은 두 normal distribution 사이의 KL divergence를 나타냄.
- : Data dimensionality
- : 좌표
3-4. Simplified training objective


최종 loss는 위와 같이 나타난다. Ground truth - estimated output간 MSE loss를 줄이는 과정이 denoising과 비슷해 DDPM이라는 이름이 붙음.
Simplified objective을 통해 diffusion process를 학습하면 매우 작은 t 에서뿐만 아니라 큰 t에 대해서도 network 학습이 가능하기 때문에 매우 효과적.

- Algorithm 1: Training
- Noise를 더해나가는 과정, network(, )가 t step에서 noise()가 얼마만큼 더해졌는지를 학습한다.
- 학습 시에는 특정 step의 이미지가 얼마나 gaussian noise가 추가되었는지를 예측하도록 학습된다.
- 코드에서는 랜덤 노이즈와 시간 단계 t로 노이즈가 추가된 이미지를 얻고 해당 이미지를 보고 모델이 노이즈를 예측
def p_losses(self, x_start, t, noise = None):
b, c, h, w = x_start.shape
noise = default(noise, lambda: torch.randn_like(x_start))
# noise sample
x = self.q_sample(x_start = x_start, t = t, noise = noise)
# if doing self-conditioning, 50% of the time, predict x_start from current set of times
# and condition with unet with that
# this technique will slow down training by 25%, but seems to lower FID significantly
x_self_cond = None
if self.self_condition and random() < 0.5:
with torch.no_grad():
x_self_cond = self.model_predictions(x, t).pred_x_start
x_self_cond.detach_()
# predict and take gradient step
model_out = self.model(x, t, x_self_cond)
if self.objective == 'pred_noise':
target = noise
elif self.objective == 'pred_x0':
target = x_start
elif self.objective == 'pred_v':
v = self.predict_v(x_start, t, noise)
target = v
else:
raise ValueError(f'unknown objective {self.objective}')
loss = self.loss_fn(model_out, target, reduction = 'none')
loss = reduce(loss, 'b ... -> b (...)', 'mean')
loss = loss * extract(self.loss_weight, t, loss.shape)
return loss.mean()- Algorithm 2: Sampling
- Network를 학습하고 나면, gaussian noise에서 시작해서 순차적으로 denoising 하는 것이 가능하다. (by parameterized markovian chain)
- 코드에서는 noise 제거 후 소량의 noise를 다시 추가하고 있음
@torch.no_grad()
def p_sample(self, x, t: int, x_self_cond = None):
b, *_, device = *x.shape, x.device
batched_times = torch.full((b,), t, device = x.device, dtype = torch.long)
model_mean, _, model_log_variance, x_start = self.p_mean_variance(x = x, t = batched_times, x_self_cond = x_self_cond, clip_denoised = True)
noise = torch.randn_like(x) if t > 0 else 0. # no noise if t == 0
pred_img = model_mean + (0.5 * model_log_variance).exp() * noise
return pred_img, x_start4. Experiments
- T: 1000
- backbone: U-Net
각 down/upsampling 단계는 ResNet/ConvNext 블록 2개 + (groupnorm + attention + residual) + down/upsampling으로 구성됨
block_klass = partial(ResnetBlock, groups = resnet_block_groups)
self.downs.append(nn.ModuleList([
block_klass(dim_in, dim_in, time_emb_dim = time_dim),
block_klass(dim_in, dim_in, time_emb_dim = time_dim),
Residual(PreNorm(dim_in, LinearAttention(dim_in))),
Downsample(dim_in, dim_out) if not is_last else nn.Conv2d(dim_in, dim_out, 3, padding = 1)
]))
self.ups.append(nn.ModuleList([
block_klass(dim_out + dim_in, dim_out, time_emb_dim = time_dim),
block_klass(dim_out + dim_in, dim_out, time_emb_dim = time_dim),
Residual(PreNorm(dim_out, LinearAttention(dim_out))),
Upsample(dim_out, dim_in) if not is_last else nn.Conv2d(dim_out, dim_in, 3, padding = 1)
]))
class Unet(nn.Module):
def __init__(
self,
dim,
init_dim = None,
out_dim = None,
dim_mults=(1, 2, 4, 8),
channels = 3,
self_condition = False,
resnet_block_groups = 8,
learned_variance = False,
learned_sinusoidal_cond = False,
random_fourier_features = False,
learned_sinusoidal_dim = 16
):
super().__init__()
# determine dimensions
self.channels = channels
self.self_condition = self_condition
input_channels = channels * (2 if self_condition else 1)
init_dim = default(init_dim, dim)
self.init_conv = nn.Conv2d(input_channels, init_dim, 7, padding = 3)
dims = [init_dim, *map(lambda m: dim * m, dim_mults)]
in_out = list(zip(dims[:-1], dims[1:]))
block_klass = partial(ResnetBlock, groups = resnet_block_groups)
# time embeddings
time_dim = dim * 4
self.random_or_learned_sinusoidal_cond = learned_sinusoidal_cond or random_fourier_features
if self.random_or_learned_sinusoidal_cond:
sinu_pos_emb = RandomOrLearnedSinusoidalPosEmb(learned_sinusoidal_dim, random_fourier_features)
fourier_dim = learned_sinusoidal_dim + 1
else:
sinu_pos_emb = SinusoidalPosEmb(dim)
fourier_dim = dim
self.time_mlp = nn.Sequential(
sinu_pos_emb,
nn.Linear(fourier_dim, time_dim),
nn.GELU(),
nn.Linear(time_dim, time_dim)
)
# layers
self.downs = nn.ModuleList([])
self.ups = nn.ModuleList([])
num_resolutions = len(in_out)
for ind, (dim_in, dim_out) in enumerate(in_out):
is_last = ind >= (num_resolutions - 1)
self.downs.append(nn.ModuleList([
block_klass(dim_in, dim_in, time_emb_dim = time_dim),
block_klass(dim_in, dim_in, time_emb_dim = time_dim),
Residual(PreNorm(dim_in, LinearAttention(dim_in))),
Downsample(dim_in, dim_out) if not is_last else nn.Conv2d(dim_in, dim_out, 3, padding = 1)
]))
mid_dim = dims[-1]
self.mid_block1 = block_klass(mid_dim, mid_dim, time_emb_dim = time_dim)
self.mid_attn = Residual(PreNorm(mid_dim, Attention(mid_dim)))
self.mid_block2 = block_klass(mid_dim, mid_dim, time_emb_dim = time_dim)
for ind, (dim_in, dim_out) in enumerate(reversed(in_out)):
is_last = ind == (len(in_out) - 1)
self.ups.append(nn.ModuleList([
block_klass(dim_out + dim_in, dim_out, time_emb_dim = time_dim),
block_klass(dim_out + dim_in, dim_out, time_emb_dim = time_dim),
Residual(PreNorm(dim_out, LinearAttention(dim_out))),
Upsample(dim_out, dim_in) if not is_last else nn.Conv2d(dim_out, dim_in, 3, padding = 1)
]))
default_out_dim = channels * (1 if not learned_variance else 2)
self.out_dim = default(out_dim, default_out_dim)
self.final_res_block = block_klass(dim * 2, dim, time_emb_dim = time_dim)
self.final_conv = nn.Conv2d(dim, self.out_dim, 1)
def forward(self, x, time, x_self_cond = None):
if self.self_condition:
x_self_cond = default(x_self_cond, lambda: torch.zeros_like(x))
x = torch.cat((x_self_cond, x), dim = 1)
x = self.init_conv(x)
r = x.clone()
t = self.time_mlp(time)
h = []
for block1, block2, attn, downsample in self.downs:
x = block1(x, t)
h.append(x)
x = block2(x, t)
x = attn(x)
h.append(x)
x = downsample(x)
x = self.mid_block1(x, t)
x = self.mid_attn(x)
x = self.mid_block2(x, t)
for block1, block2, attn, upsample in self.ups:
x = torch.cat((x, h.pop()), dim = 1)
x = block1(x, t)
x = torch.cat((x, h.pop()), dim = 1)
x = block2(x, t)
x = attn(x)
x = upsample(x)
x = torch.cat((x, r), dim = 1)
x = self.final_res_block(x, t)
return self.final_conv(x)- 16 x 16 feature map resolution에 self-attention. conv에서 차원을 3배로 늘리고 q,k,v로 분해.
class Attention(nn.Module):
def __init__(self, dim, heads = 4, dim_head = 32):
super().__init__()
self.scale = dim_head ** -0.5
self.heads = heads
hidden_dim = dim_head * heads
self.to_qkv = nn.Conv2d(dim, hidden_dim * 3, 1, bias = False)
self.to_out = nn.Conv2d(hidden_dim, dim, 1)
def forward(self, x):
b, c, h, w = x.shape
qkv = self.to_qkv(x).chunk(3, dim = 1)
q, k, v = map(lambda t: rearrange(t, 'b (h c) x y -> b h c (x y)', h = self.heads), qkv)
q = q * self.scale
sim = einsum('b h d i, b h d j -> b h i j', q, k)
attn = sim.softmax(dim = -1)
out = einsum('b h i j, b h d j -> b h i d', attn, v)
out = rearrange(out, 'b h (x y) d -> b (h d) x y', x = h, y = w)
return self.to_out(out)- Linear attention
class LinearAttention(nn.Module):
def __init__(self, dim, heads = 4, dim_head = 32):
super().__init__()
self.scale = dim_head ** -0.5
self.heads = heads
hidden_dim = dim_head * heads
self.to_qkv = nn.Conv2d(dim, hidden_dim * 3, 1, bias = False)
self.to_out = nn.Sequential(
nn.Conv2d(hidden_dim, dim, 1),
LayerNorm(dim)
)
def forward(self, x):
b, c, h, w = x.shape
qkv = self.to_qkv(x).chunk(3, dim = 1)
q, k, v = map(lambda t: rearrange(t, 'b (h c) x y -> b h c (x y)', h = self.heads), qkv)
q = q.softmax(dim = -2)
k = k.softmax(dim = -1)
q = q * self.scale
v = v / (h * w)
context = torch.einsum('b h d n, b h e n -> b h d e', k, v)
out = torch.einsum('b h d e, b h d n -> b h e n', context, q)
out = rearrange(out, 'b h c (x y) -> b (h c) x y', h = self.heads, x = h, y = w)
return self.to_out(out)- Diffusion time 는 각 residual block에 transformer sinusoidal positional embedding이 추가돼서 구분됨
class SinusoidalPosEmb(nn.Module):
def __init__(self, dim):
super().__init__()
self.dim = dim
def forward(self, x):
device = x.device
half_dim = self.dim // 2
emb = math.log(10000) / (half_dim - 1)
emb = torch.exp(torch.arange(half_dim, device=device) * -emb)
emb = x[:, None] * emb[None, :]
emb = torch.cat((emb.sin(), emb.cos()), dim=-1)
return emb4-1. Sample quality
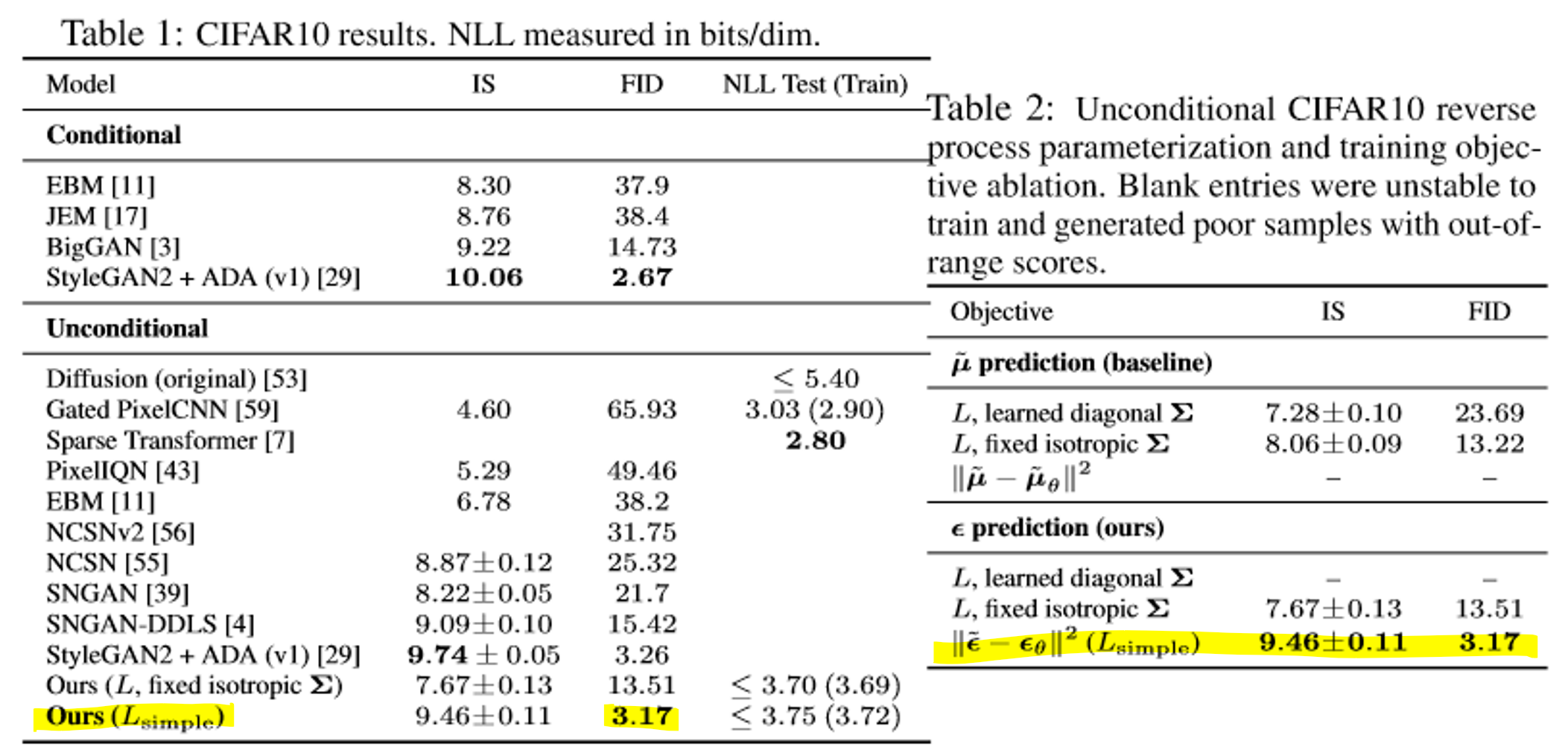
FID, IS로 metric 계산. Unconditional model인데도 conditional model보다 우월. Codelength에서 차이가 없기 때문에 overfitting의 가능성도 적음.
- FID score: Inception V3으로 이미지의 분포를 계산한 metric
- Unconditional model: 한번 dataset에 학습되면 추가적인 context 없이 image를 생성
- Conditional model: Class, label 등의 추가 정보를 받아 image를 생성
보다 을 계산하는 것이 성적이 좋고, fixed variance를 사용했을 때에도 성능이 감소하지 않음.
Questions
에서 I의 의미는?
- 단위행렬인것 같은데 왜 나오는지 모르겠음.
Noise를 만드는 과정이 fixed 돼있다면 그냥 매번 noise를 생성할 필요 없이 Gaussian dist.로 랜덤 생성하면 되는거 아닌가?
- Noise를 만드는 함수의 분포에서 reverse process 를 유추하기 때문에 랜덤 생성하면 DDPM 자체가 성립하지 않을듯?
Markov chain의 n-1번째 상태는 n-2에 영향을 받았는데, n번째 상태는 n-2번째 상태와 독립적이라고 말할 수 있는가?
(Lossless) codelength는 무엇인가?
- Lossless codelength는 데이터의 엔트로피에 가까운 길이의 코드를 생성하는 데 사용되는 압축 알고리즘을 개발하는 것을 의미합니다. 이는 데이터의 분포에 대한 크로스 엔트로피를 최소화하여 생성 모델을 훈련시키고, 그 다음에 데이터의 엔트로피에 가까운 코드 길이를 갖는 코드를 구성하는 일반적인 방법입니다.
Reference
- 논문
- 코드
- PyTorch implementation: denoising-diffusion-pytorch
- 코드리뷰: Denoising Diffusion Pytorch
- 유투브
- 논문 리뷰
- 수식 증명
- etc.
