[3D Perception] 1. LiDAR의 종류와 측정 원리
1. LiDAR
- Light Detection And Ranging
- 빛을 탐지하고 범위를 측정하는 센서
- RADAR(RAdio Detection And Ranging)에서 사용하는 전파 (radio)를 빛(light)로 변경한 센서
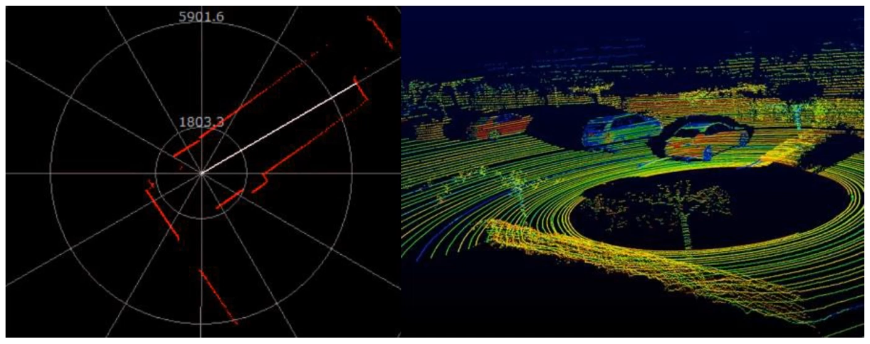
- point cloud : LiDAR data
1-1. LiDAR 종류
- single point distance sensor -> 레이저 포인터와 같은 점
- 2D Scanners -> 강의장에서 사용하는 LiDAR (x, y)
- 3D Scanners
- Non-Repeating Pattern Scanners -> 원이 아닌 복잡하고 비반복적인 패턴을 사용한다
2D LiDAR와 3D LiDAR의 차이
- 센서의 채널 수가 다르다
- 2D LiDAR : 1개의 채널, (N, 2)
- 3D LiDAR : N개의 채널, (N, 3), 채널 수에 따라 객체의 입체적인 데이터를 가진다
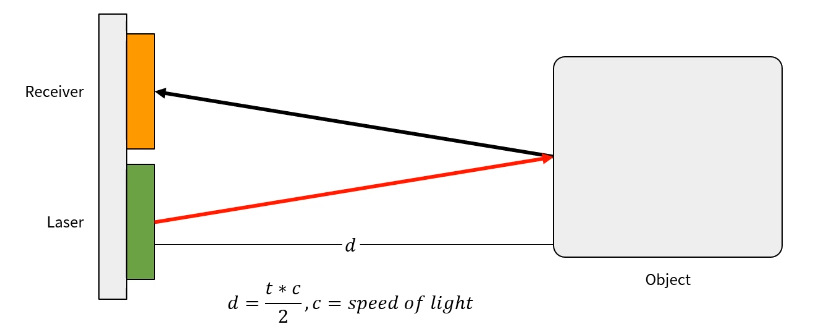
1-2. LiDAR 센서의 측정 원리
- 빛이 반사된 거리를 측정한다
- 빛의 속도와 반사된 시간을 곱하여 거리를 측정할 수 있다
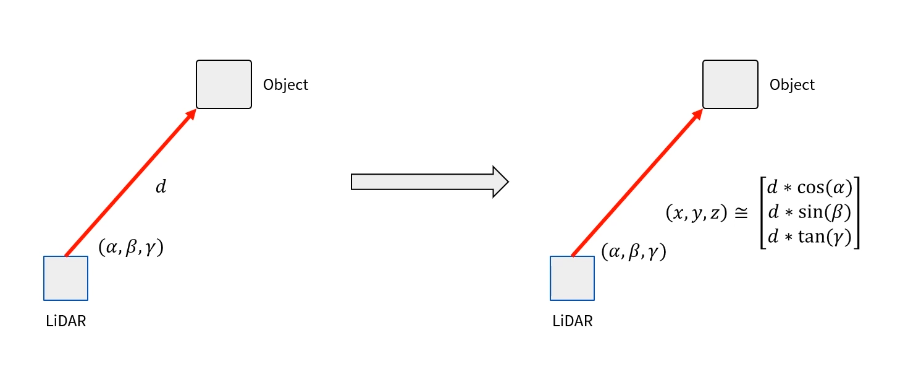
1-3. LiDAR Parsing
- LiDAR는 반사된 객체와의 직선 거리를 반환하기 때문에 반사된 포인트의 위치를 파악하기 위해서는 별도의 계산이 필요하다
- 거리(d)와 빛의 각도(α,β,γ)를 알 수 있기 때문에 이를 활용하여 위치를 계산한다
- LiDAR 센서마다 방법이 다르다
- 센서마다 제공하는 데이터가 다르기 때문에 반드시 공식 문서를 참고한다
- 센서의 SDK를 제공하는 경우도 있다
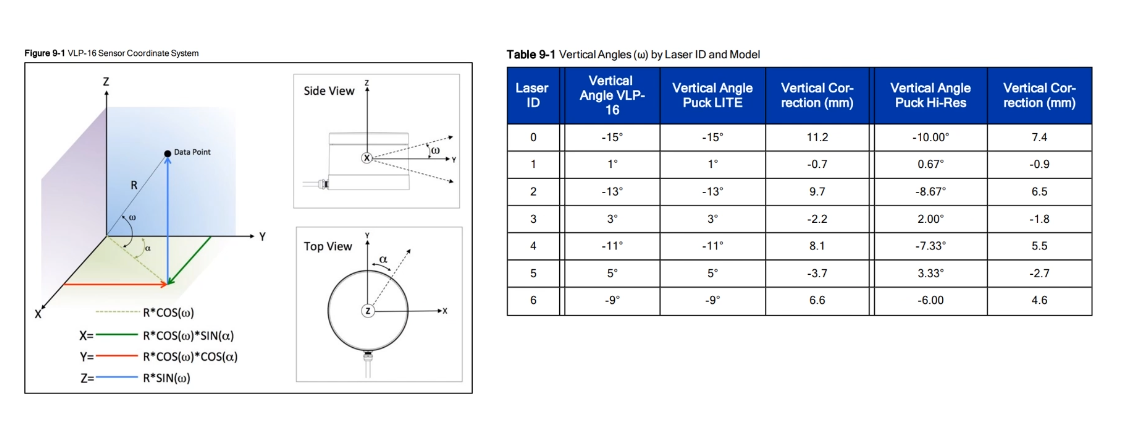
Velodyne VLP-16 LiDAR
- 16 채널(layer)를 가지고 있다
- Laser ID를 layer라고 한다
- R값(거리)값들을 받을 후 ω와 α를 계산한다
- 그 후 공식을 사용하여 위치를 추정한다
2. LiDAR 종류
2-1. 3D LiDAR
- N개의 채널을 만드는 방법에 따라 다양한 구조를 가지고 있다
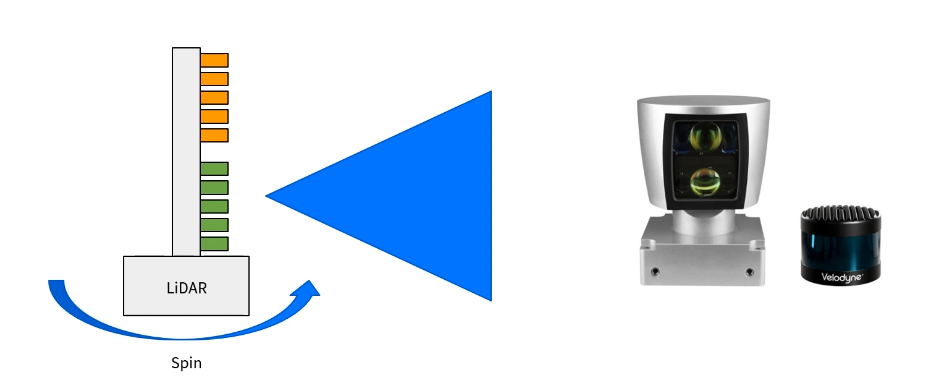
Mechanical 3D Spinning LiDAR
- 장점 : 360도 회전이 가능하다
- 단점
- 발광부와 수신부의 개수에 따라 채널이 제한되고 크기가 커진다
- 진동에 의한 내구성이 약하다
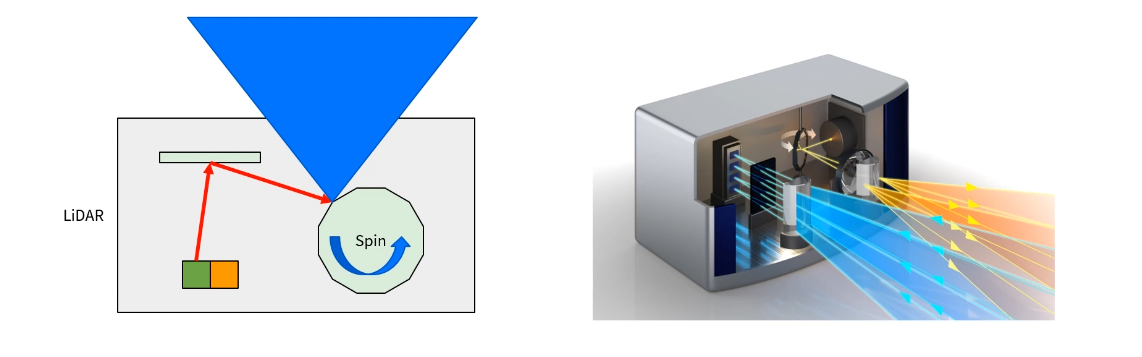
Solid-State LiDAR
- 특정한 반사물질을 이용한다
- 주로 거울이 사용된다
- 두번째 반사물질이 여러 각도로 빛을 퍼지게 만들어주어 여러 채널을 갖는 효과를 만들어준다
- 장점
- single-Laser로도 N개의 채널을 표현할 수 있다
- 따라서 가격이 비교적 저렴
- 단점
- 복잡한 동작 방식
- 매우 높은 Hz (~160Hz)
- 그에 따른 내구성 문제가 존재한다
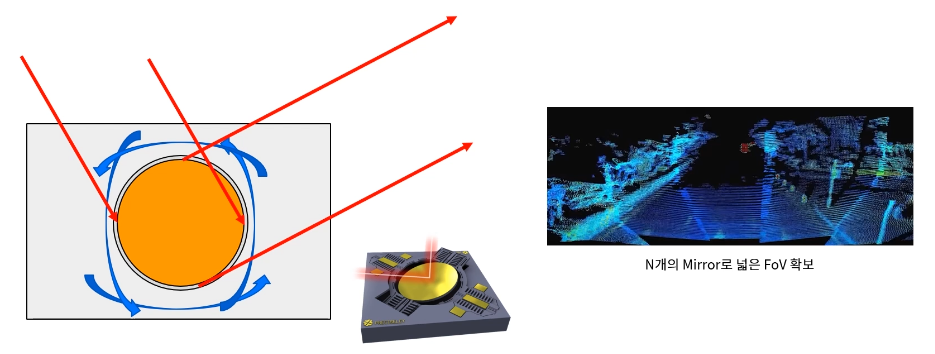
MEMS LiDAR
- 반사물질이 상/하, 좌/우 반복운동을 하고 N개의 Laser를 사용할 수 있어 데이터 취득에 더욱 용이하다
- Solid-state LiDAR와 비슷하지만 두번째 반사물질을 제거한 형태이다
- 따라서 반사물질을 개수를 줄일 수 있었다
- 장점 : single-laser로도 N개의 채널을 표현할 수 있다
- 단점
- 높은 제작 난이도
- 매우 높은 Hz(~800Hz) : 하나의 laser로 여러 채널을 표현해야하기 때문에 그만큼 빨리 움직여야한다
- 그에 따른 내구성 문제가 존재한다
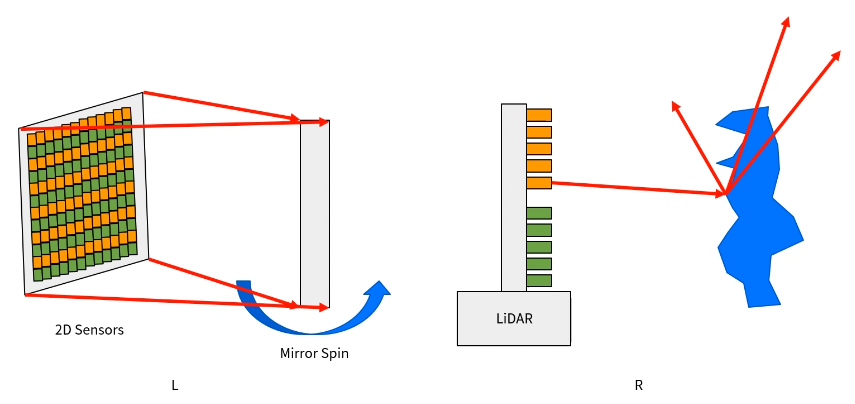
그 외의 LiDAR
- 복합적인 요소를 사용하는 LiDAR도 존재한다
- 왼쪽 LiDAR (L)
- 고정형 발광 & 수신부 : 이전까지는 한줄로 이루어져있었지만 이 방법은 2D array에 해당하는 형식으로 이루어져있다
- mirror 회전 방식
- 낮은 Hz (빛이 면으로 발광하기 때문에)로도 넓은 FoV 확보 가능
- 오른쪽 LiDAR (R)
- non-repeating pattern scanners 방식
- 비반복적인 패턴을 사용해서 낮은 laser로도 매우 높은 채널을 만들어내는 방법이다
- 최근에는 이 방법이 많이 사용되는 것 같다
- 반복적 방법의 문제점 : layer들이 고정되어 있기 때문에 먼 거리에서 레이저 사이에 있는 물체는 검출하지 못하는 경우가 발생할 수 있었다
3. LiDAR와 RADAR의 차이
| LiDAR | RADAR |
|---|
|  |  |
| 활용 소재 | 레이저 (light) | 전자파 (radio) |
| 형체 인식 정도 | 가능 | 정확한 인식 불가능 |
| 외부 환경에 대한 영향 (눈, 비) | 있음 | 없음 |
| 가격 | 고가 | 저가 |
