Build 3rdParty
cmake 설치
- 난 이미 되어 있다
- 터미널에서 설치
$ sudo apt-get install -y cmake설치할 프로그램의 소스코드 가져오기
- https://github.com/opencv/opencv
- opencv가 cmake로 빌드 될 수 있다는 것을 어떻게 알 수 있나?
- 파일 구조 확인
- 가장 상위단에 CMakeLists.txt 파일이 있으면 cmake로 빌드를 지원하겠다는 의미
- 깃헙에서 clone 하기
$ git clone https://github.com/opencv/opencv.git
- 현재는 홈 디렉토리에 설치 했지만 좋은 위치가 아니다. 나중에 좋은 경로 알려준다. (일단은 내가 dev_opencv 폴더 만들어서 넣어놨다)
빌드
cmake 빌드에는 두단계가 있다
- generate 단계
- txt파일을 읽어서 c++ 프로젝트의 구조를 파악하고 빌드를 위한 컴파일러가 있는지, 빌드 시스템이 존재하는지 빌드를 위한 소스코드가 제자리에 있는지 확인
- 그 후, 빌드 시스템에 맞춰 빌드 build command 생성
- build 단계
- 빌드 시스템에 c++ 프로그램과 라이브러리 빌드
사용하기
build, install 폴더 생성
- build : 빌드 완성물
- install : 프로그램 설치 작업, 완성된 빌드에서 유저가 직접 사용할 라이브러리와 프로그램들만 시스템 폴더로 옮겨주는 작업을 install이라고 함. 보통은 system이라는 폴더로 가서 install폴더를 만들 필요가 없다.고
- 지금은 시스템 설치 방법, 원하는 곳에 설치하는 방법을 배우기 위해 install 폴더를 만들었다.
$ cd dev_opencv
$ mkdir build
$ mkdir install
generate 단계
cmake 명령어로 cmake 호출
$ cd build
$ cmake ../opencv/ --> 이렇게만해도 generate된다- 파라미터 : generate하고 싶은 프로젝트에 가장 상위단의 CMakeListas.txt가 존재하는 경로를 적어주면 된다.
디버그, 릴리즈 모드 선택
- 디버깅 모드 : 모든 최적화 과정을 풀어서
$ cmake -DCMAKE_BUILD_TYPE=Debug ../opencv-
-D는 파라미터를 의미 -
-DCMAKE_BUILD_TYPE=Debug 또는 Release사용 -
릴리즈 모드 : 코드 최적화, 디버깅하기 어렵다
$ cmake -DCMAKE_BUILD_TYPE=Release ../opencv빌드 시스템(generator) 선택
- 리눅스는 make
- 닌자 : 빌드 시스템
-G사용
$ cmake -DCMAKE_BUILD_TYPE=Release -GNinja ../opencvinstall할때 저장 위치 설정
- 아무런 설정을 해주지 않으면 usr/local/include 같은 곳에 저장이 된다
- 장점 : 어떤 프로젝트에서도 쉽게 라이브러리를 로딩할 수 있다
- 단점 : 동일한 라이브러리를 여러 버전으로 설치할 경우, 충돌이 날 수 있다. (cmake에서 버전을 설정할 수 있지만 꼬일 수 있다)
- 그래서 system 디렉토리가 아닌 local 폴더에 저장하는 것을 선호 한다
- 이 방법의 장점은 지울때 해당 폴더만 지우면 된다 / 꼬이는 것을 피할 수 있다.
-DCMAKE_INSTALL_PREFIX=원하는 경로
$ cmake -DCMAKE_BUILD_TYPE=Release -GNinja -DCMAKE_INSTALL_PREFIX=../install ../opencv현재 최종 generate 실행
$ cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=../install ../opencv- 이걸 하고 나면 build 폴더에 뭐가 많이 생긴다.
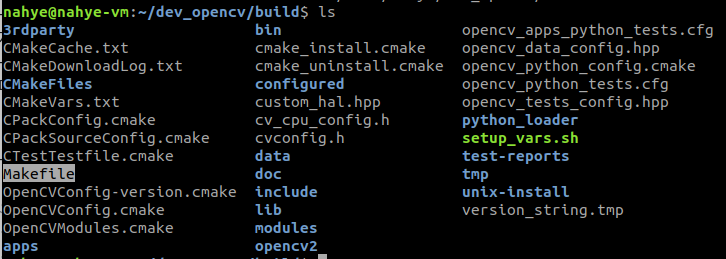
- Makefile : make build 시스템이 사용할 수 있는 모든 command를 늘여놓은 것
빌드하기
$ make
또는
$ make -j (난 이걸로 하니 터져버렸다...)makefile 기준으로 빌드가 된다.
- 빌드 완료 확인 방법
- build/lib 확인 : 라이브러리 파일들이 있으면 빌드가 잘 된거다
옵션들
-j: 동시에 빌드를 할 수 있는 작업의 수, 보통 core하나당 작업이 하나씩 할당되어 병렬 빌드 -> 더 빠르게 빌드가 된다- 빌드 중에 빌드가 터지는 경우, 엄청 느려지는 경우, 에러가 (cc1+) 난 경우 -> 이 옵션 때문에 생겼다.
- 빌드할 때 메모리를 많이 잡아먹는데, 모든 core를 사용하면 다른 작업을 할 수 없기 때문에 느려진다.
- 메모리를 다 차지하게 되면 더 이상 빌드를 할 메모리가 존재하지 않으면 난리가 나고 빌드가 종료된다.
- 본인의 컴퓨터에서 ram 용량의 2~3배 정도를 swap 메모리에 할당하면 좋다
- swap 메모리 : 실제 메모리 Ram이 가득 찼지만 더 많은 메모리가 필요할때 디스크 공간을 이용하여 부족한 메모리를 대체할 수 있는 공간
- 또는
-j2이런식으로 동시 작업의 수를 정해준다. 자신의 전체 core 수보다 2개 정도 작게 잡으면 좋다
install
- 유저 입장에서 필요한 것들만 모아주는 것 -> install
빌드 파일에서
$ sudo make install- sudo를 해주는 이유 : 원래는 system 폴더에 저장이 되기 때문에 이에 접근하기 위해 sudo를 사용한다 .
- install 파일 확인
Hello CMake
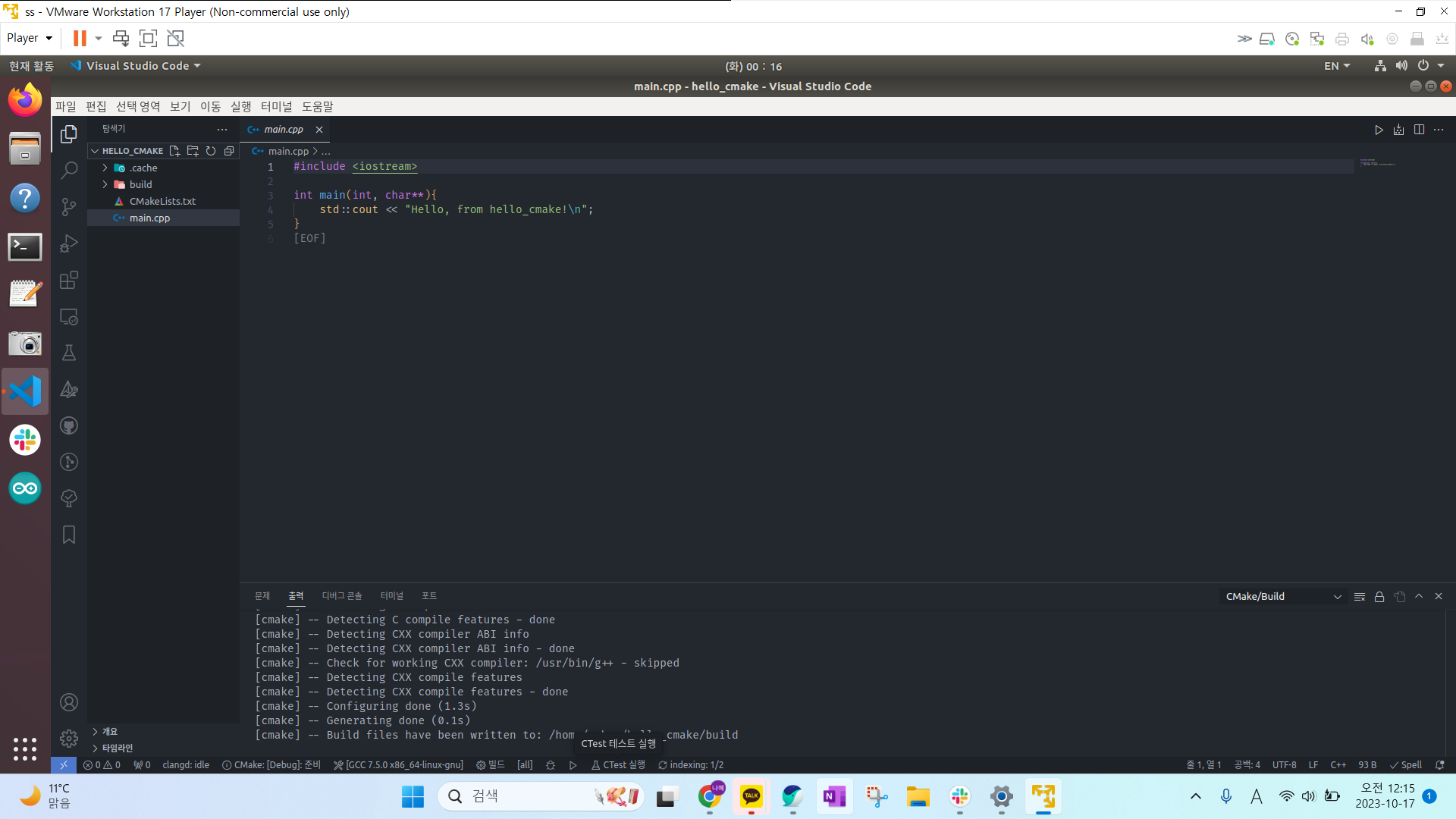
- 수업에서는 CLine 을 사용했지만 나는 vscode를 사용할거다
- 먼저 vscode에 cmake와 cmake tools라는 확장툴이 설치되어 있어야한다.
참고 : https://geeks-mimic.tistory.com/62
- 새 프로젝트를 만들어 준다
-
홈 디렉토리에
hello_cmake폴더를 만든다 -
cmake : 빠른 시작 -> gcc 선택 -> c++ 선택

-
결과로 이렇게 만들어 진다.
- CMAkeLists.txt 파일 살펴보기
cmake_minimum_required(VERSION 3.0.0)
project(hello_cmake VERSION 0.1.0 LANGUAGES CXX)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
add_executable(hello_cmake main.cpp)- cmake_minimum_required : cmake의 최소 버전 명시
- project : 프로젝트의 이름
- LANGUAGES CXX : c++ 언어를 사용하겠다
- set : 어떤 변수의 값을 넣어주는 것
- CMAKE_ : cmake에 종속되어 있다는 의미
- set(CMAKE_CXX_STANDARD 14) : c++14으로 빌드하겠다
- set(CMAKE_CXX_STANDARD_REQUIRED ON) : c++14을 넘어가는 기능들이 사용되는 경우 빌드가 되지 않도록 제한하는 것(이게 없으면 warning만 나타나고 빌드가 계속 진행됨)
- 자율주행의 경우 14을 요구하는 경우가 많다
- add_executable : 실행파일을 추가하겠다
- add_executable(hello_cmake main.cpp) : (실행파일의 이름, 프로그램을 만들기 위해 사용될 소스코드)
-
빌드
vscode 아래의 빌드 버튼을 누르면 빌드가 진행된다. -
실행
실행 버튼을 누르면 실행된다.
목표 1 : C++ 프로젝트의 폴더 구조 확립
소스파일을 넣어둘 폴더 (2가지 방법론이 있다)
(1) 헤더 파일과 소스 파일 분리하는 방법
- include 폴더 : 헤더파일
- source 폴더 : 소스코드 파일
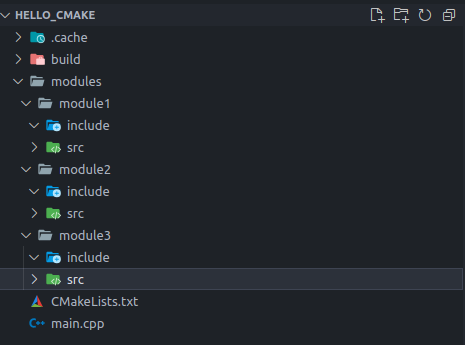
(2) modules 폴더 안에 여러 module 폴더를 만들고 각각의 폴더에 헤더파일과 소스파일을 둘다 넣어둔다
-> 둘다 섞어서 쓰시는 걸 좋아한다
- modules 폴더 안에 module1, module2, module3 폴더를 만든다. 여기 안에 각각 include와 src를 하나씩 만든다.
- 모듈들은 라이브러리만 생성한다
-
examples 폴더 : main 문들만 있다. 모든 코드들의 entry point
-
thirdparty : thirdparty 라이브러리
최종
목표 2 : openCV를 사용하는 라이브러리 빌드
opencv 설치
- thirdparty 안에 opencv 빌드한다
$ cd thirdparty
$ mkdir OpenCV
$ cd OpenCV
$ git clone https://github.com/opencv/opencv.git
- build와 install 폴더를 만든다.
$ mkdir build
$ mkdir install
- build 폴더에 디버그 모드로 빌드한다.
$ cd build
$ cmake -DCMAKE_BUILD_TYPE=Debug -DCMAKE_INSTALL_PREFIX=../install ../opencv
$ make- install 한다
$ sudo make install- 파일 생성 확인
module1 만들기
- include안에 module1 폴더 생성
- module1안에 헤더파일 만들기
- ClassMat.hpp
#ifndef HELLO_CMAKE_CLASSMAT_HPP
#define HELLO_CMAKE_CLASSMAT_HPP
class ClassMat
{
public:
ClassMat() = default;
private:
cv::Mat cv_mat_;
};
#endif- src 안에 ClassMat.cpp
#include "module1/ClassMat.hpp"- 이렇게 하면 문제가 2개 있다
- ClassMat.hpp에서는 opencv를 찾지 못해 cv에서 오류 발생
- ClaaMat.cpp에서 module1을 찾지 못해 에러 발생
- 왜인가? cmake로 프로젝트를 엮어주지 않았기 때문에 발생!
- 가장 최상위단의 CMakeLists.txt파일 수정
cmake_minimum_required(VERSION 3.0.0)
project(hello_cmake VERSION 0.1.0 LANGUAGES CXX)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
add_subdirectory(modules)
add_executable(hello_cmake main.cpp)- subdirectory : 지정한 디렉토리에 있는 CMakeList.txt 파일을 실행하겠다. 근데 아직 modules 폴더에 txt파일이 없다. -> 생성해야한다.
- modules 폴더 안에 CMakeLists.txt 파일 생성
add_subdirectory(module1)- module1에도 txt 파일이 없기 때문에 생성해야함
- module1 폴더 안에 CMakeLists.txt 파일 생성
- module1 자체도 하나의 라이브러리가 될 예정이니까 이 역시 하나의 c++ 프로젝트라고 볼 수 있다. -> 최상위단과 비슷하게 만들어야한다.
cmake_minimum_required(VERSION 3.0.0)
project(module1 LANGUAGES CXX)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)- module1 작성 (소스파일 정리)
CMake txt에
//소스파일이 어떤 것들이 잇는지, 다른 cpp 파일이 생기면 여기에 추가로 적으면 된다
//변수 MODULE_SOURCE_FILES 생성
set(MODULE1_SOURCE_FILES
src/ClassMat.cpp
)
//소스파일 기반 라이브러리 빌드를 위해
//라이브러리의 이름은 module1
//모든 소스파일들을 여기에 추가 `${}`이렇게 변수를 사용(안에 변수명을 적으면 된다)
add_library(module1
${MODULE_SOURCE_FILES}
)
//소스파일들을 사용한 헤더파일 연결
//특정 target 정해줌, 여기서는 module1, 즉 module1에 들어가는 헤더파일들에 대해서만
//어떻게 include 할지 정해줄 수 있다 : PRIVATE(외부에 노출 x), PUBLIC(이 라이브러리를 사용하는 상위 라이브러리들도 하위 라이브러리에 쉽게 접근할 수 있다) INTERFACE
//헤더 파일 include 해야함 -> 단순히 경로를 지정해주면 된다
//즉, target_include_directories (특정타겟 include방법지정 경로)
target_include_directories(module1 PRIVATE
include)
//include_directoriese : global, 모든 하위 cmakelist 에서도 적용가능- generate 해준다
- 그 결과 라이브러리를 빌드하는 옵션이 생긴다.
- 빌드
- 오류가 난다. cv 때문에
- 소스파일과 헤더파일이 연결이 되어 헤더파일까지 검사한다.
-> opencv를 연결해야한다.
- opencv 연결 (cmake로 가능)
- thirdparty에 설치해둔 상태이다
- module1 폴더의 CMakeLists.txt에
//thirdparty에서 opencv를 찾아야한다
//REQUIRED : 찾지 못했을 경우 빌드를 하지 않는다.
//fins_package는 시스템에 저장된 것들 먼저 찾는다 -> 우리는 local에 설치 했기 때문에 hint 를 사용해서 경로를 지정해야한다.
//CMAKE_SOURCE_DIR : 가장 최상위 ,entry directory를 의미한다(여기에서는 hello_cmake폴더)
//find_package랑 호환되는 모든 라이브러리들은 '라이브러리이름config.cmake' -> 이걸 찾아서 연결해줘야한다 -> 그 파일이 있는 경로를 적어주면 된다.
find_package(OpenCV REQUIRED HINTS ${CMAKE_SOURCE_DIR}/thirdparty/OpenCV/install/lib/cmake/opencv4)
- opencv 경로가 usr/share/Opencv 이런 곳에 있고 버전도 다르다... 기존의 opencv 삭제를 진행했다
https://velog.io/@bbirong/Ubuntu-18.04%EC%97%90-OpenCV-4.2-%EC%84%A4%EC%B9%98 참고
-
빌드

아직 이런 에러가 있다 -
opencv가 찾아졌는지 확인해본다
- module1 폴더의 CMakeLists.txt에
//config.cmake에서 라이브러리를 찾았으면 `라이브러리_FOUND`가 true가 된다
//message(STATUS ) : 빌드를 할 때 상태 출력
if (OpenCV_FOUND)
message(STATUS "opencv found!! - ${OpenCV_DIR}")
endif()
- 제대로 찾았다
- include directory에 opencv를 include해준다
- module1 폴더의 CMakeLists.txt에
target_include_directories(module1 PRIVATE
include
${OpenCV_INCLUDE_DIRS}
)- 라이브러리를 link 해줘야한다
target_include_directories는 헤더파일을 연결
target_link_libraries() : 라이브러리를 linking 해주는 것
목표 3 : opencv를 사용하는 프로그램 만들기
- examples 폴더에
exec_module1.cpp파일 생성
#include "module1/ClassMat.hpp"
#include <iostream>
int main()
{
const auto instance = ClassMat();
std::cout << "success" << std::endl;
return 0;
}- 최상단의 CMakeLists.txt에 추가
add_executable(exec_module1 examples/exec_module1.cpp)- 라이브러리 링크를 해줘야한다. 최상단의 CMakeLists.txt에 추가
target_link_libraries(exec_module1 PRIVATE
module1)- 빌드

- include가 안된 상황
- include를 직접 해줘도 좋고
- module1의 CMakeLists.txt파일의 target_include_directories 를 PUBLIC으로 (이 방법 선택했다)
--> 아니 다 똑같이 했는데 헤더파일이 없다고 뜬다... 이것저것 해보다가 안되서 vscode를 껐다가 키니까 됐다... 이게 뭔가....ㅠㅠ
목표 4 : opencv와 eigen3를 사용하는 프로그램 만들기
eigen3 소스파일 clone 후 빌드
https://gitlab.com/libeigen/eigen
$ cd
$ cd hello_cmake
$ cd thirdparty
$ mkdir Eigen3
$ cd Eigen3
$ git clone https://gitlab.com/libeigen/eigen.git
$ mkdir build
$ mkdir install
$ cd build
$ cmake -DCMAKE_BUILD_TYPE=Debug -DCMAKE_INSTALL_PREFIX=../install ../eigen
$ make
$ sudo make install
module2에 eigen3를 매핑하는 라이브러리 만들기
- include 폴더 안에 module2 폴더 만들기
- module2 폴더 안에 ClassEigenMat.hpp 파일 만들기
#ifndef HELLO_CMAKE_HPP
#define HELLO_CMAKE_HPP
#include "Eigen/Dense"
class ClassEigenMat
{
public:
ClassEigenMat() = default;
private:
Eigen::Matrix3d eigen_mat_;
};
#endif- src 폴더 안에 ClassEigenMat.cpp 파일 만들기
#include "module2/ClassEigenMat.hpp"- module2 폴더 안에 CMakeLists.txt 파일 만들기
cmake_minimum_required(VERSION 3.0.0)
project(module2 LANGUAGES CXX)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
set(MODULE2_SOURCE_FILES
src/ClassEigenMat.cpp
)
add_library(module2
${MODULE2_SOURCE_FILES}
)
find_package(Eigen3 REQUIRED HINTS ${CMAKE_SOURCE_DIR}/thirdparty/Eigen3/install/share/eigen3/cmake)
if (Eigen3_FOUND)
message(STATUS "Eigen3 found!! - ${Eigen3_DIR}")
set(Eigen3_LIBS Eigen3::Eigen)
endif()
target_include_directories(module2 PUBLIC
include
${Eigen3_INCLUDE_DIRS}
)
target_link_libraries(module2 PUBLIC
${Eigen3_LIBS}
)
- Eigen3는 header only 라이브러리여서 라이브러리 안에서 include를 타고 가는 형식이여서 target_link_libraries할때 PUBLIC으로 해야 상위단에서 eigen에 include로 들어갈 수 있다고 한다.
- eigen3는 opencv처럼 바로 OpenCV_LIBS를 안주기 때문에 이렇게 해줘야한다.
set(Eigen3_LIBS Eigen3::Eigen)
- modules 폴더의 CMakeLists.txt에 추가
add_subdirectory(module2)module1과 module1를 사용하는 프로그램 만들기
- examples에
exec_module1_module2.cpp파일 만들기
#include "module1/ClassMat.hpp"
#include "module2/ClassEigenMat.hpp"
#include <iostream>
int main()
{
const auto mat_module1 = ClassMat();
const auto mat_module2 = ClassEigenMat();
std::cout << "success!!" << std::endl;
}- 최상단 CMakeLists.txt에 추가
- examples/exec_module1_module2.cpp에 module1과 module2를 link 하겠다
add_executable(exec_module1_module2 examples/exec_module1_module2.cpp)
target_link_libraries(exec_module1_module2 PRIVATE
module1
module2
)