Kalman Filter란?
- 1960년대 루돌프 칼만이 개발한 알고리즘
- 칼만 필터는 시스템의 상태에 대한 확률적인 정보를 가지고 노이즈가 섞인 측정값과 예측값을 효과적으로 결합하여 상태를 추정
- 칼만 필터는 센서를 통해 측정한 값에 노이즈가 포함되어도 이 노이즈를 제거
- 연산 과정이 빠르기 때문에 실시간, 임베디드 시스템에 적합
Kalman Filter 사용 조건
- motion model과 observation model이 linear한 경우
- motion model과 observation model이 가우시안 분포를 따를 경우
- motion model
- 로봇이 현재 위치에서 control input을 받아서 이동했을 때의 확률 모델
- observation model
- 로봇이 현재 위치에서 센서를 통해 자신의 위치를 측정했을 때의 확률 모델
Kalman Filter의 전체 과정
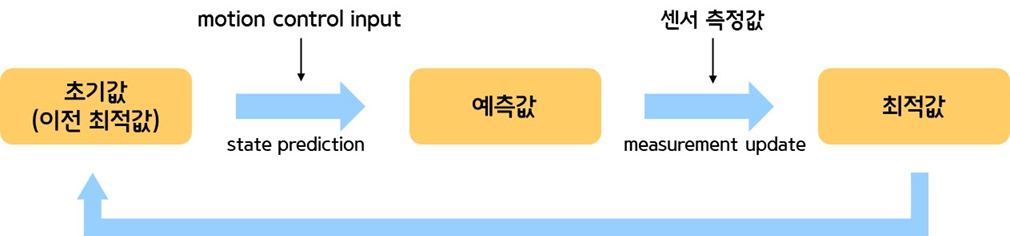
- 칼만 필터는 상태 예측 (state prediction)과 측정 업데이트 (measurement update)를 반복적으로 수행하며 현재 상태를 계산
- 상태 예측 (state prediction): 이전 상태의 추정값과 모델을 이용하여 다음 상태 예측
- 측정 업데이트 (measurement update): 예측값과 실제 측정값을 비교하여 상태를 업데이트
- 로봇의 경우 로봇이 이동하기 위해서 어디에 있는지 위치를 정확하게 알아야하는데 이때 칼만 필터를 사용
- 상태 예측: 이전 로봇의 파라미터(위치) + 로봇 모션 입력 -> 현재 로봇 파라미터 예측
- 측정 업데이트: 예측한 로봇의 파라미터 + 센서(GPS 등)를 통해 얻은 로봇의 위치 -> 로봇 파라미터 값 업데이트
간단 과정
정규 분포로 본 과정
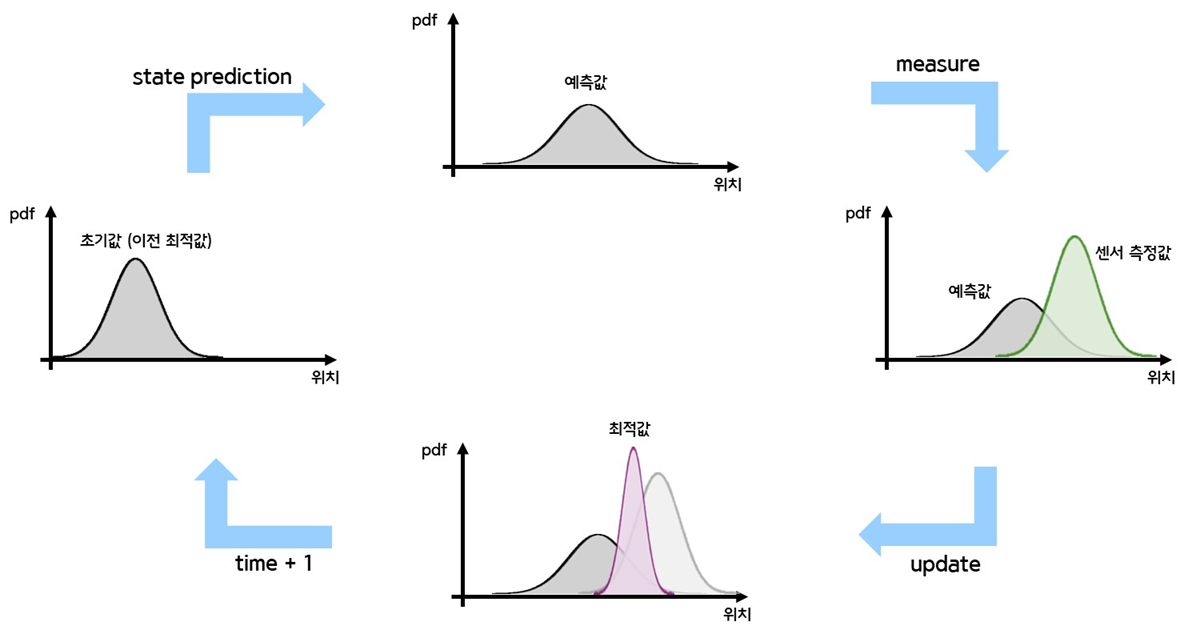
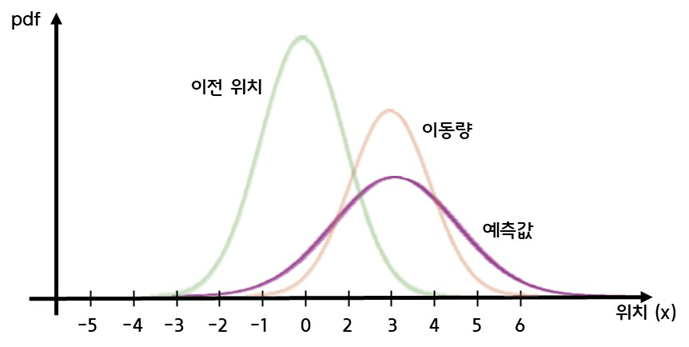
- state predict
- 이전 위치에서 motion input을 받아 이동한 현재 위치를 예측하는 과정
- 위치에 대한 정규분포와 이동에 대한 정규분포의 합성곱(convolution) 계산을 통해 이루어진다
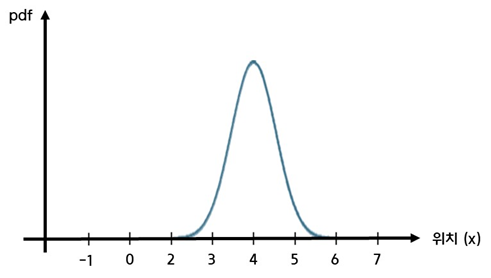
- measure
- 센서를 사용하여 현재 위치를 측정하는 과정
- 측정한 값도 정규분포로 나타난다
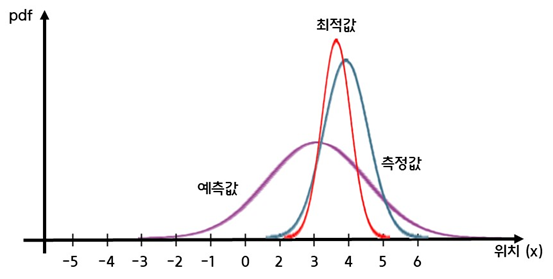
- update
- predict를 통해 예측한 값과 센서를 통해 측정한 값을 통해 최적의 값을 계산한다 (예측된 값 갱신)
- 예측값의 정규분포와 측정값의 정규분포의 곱(product) 계산을 통해 이루어진다
- time + 1
- 최적의 값을 사용하여 다시 1번부터 수행한다
Kalman Filter 세부 과정
kalman filter를 사용하여 이동하는 로봇의 위치를 추정하는 과정에 대해 자세히 설명한다
0. 로봇의 위치, 이동량 정규분포
- 칼만 필터에서는 현재 위치와 이동량을 정규분포로 표현할 수 있다
- 정규분포로 표현하는 이유는 불확실도(uncertainty)를 포함하여 위치, 이동량을 표현하기 위해서이다
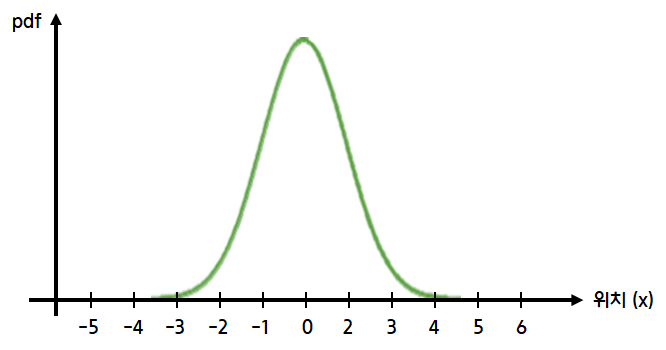
로봇의 위치
- 로봇이 위치에 있을 가능성이 가장 높다고 가정한다
- 로봇이 정확하게 위치에 있을지에 대해 불확실도가 있기 때문에 아래와 같은 정규분포로 표현할 수 있다
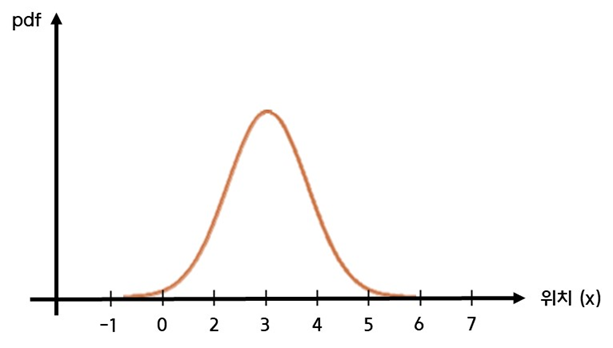
로봇의 이동량
- 로봇이 만큼 오른쪽으로 이동한다고 가정한다
- 이동량 역시 정확하게 만큼 이동하는지에 대해 불확실도가 있기 때문에 정규분포로 표현할 수 있다
1. State Predict
- 로봇이 인 상태에서 만큼 이동하였을 때 상태를 예측한다
- 로봇이 인 상태 = 이전 로봇의 파라미터
- 만큼 이동 = motion control input
- 위치에 대한 정규분포와 이동에 관한 정규분포의 합성곱(convolution) 계산을 통해 예측값을 구한다
- 합성곱을 하는 이유: 물체가 실제로 −∞ 부터 ∞까지 존재할 가능성이 있기 때문에 이 모든 경우에 대해서 이동량의 분포를 곱하고 더해주어야한다 (곱하고 더하는것 = 합성곱)
- 로봇이 에서 만큼 이동했다면 아래와 같은 분포로 표현할 수 있다
정규분포의 합성곱(convolution) 계산
- 합성곱은 임의의 두 함수 와 에 대해 다음과 같이 정의되는 연산이다
(1)
- 를 정규분포로 표현하면 다음과 같다 (여기에서 은 정규분포, 는 평균, 는 분산을 의미한다)
- 는
- 는
- 두 함수의 합성곱 결과는 다음과 같다
(2)
- 위의 예시로 보면 가 로봇의 위치에 관한 함수, 가 로봇의 이동량에 관한 함수이고 합성곱 결과는 예측값에 관한 함수이다
- 예측값 평균은
(2)에 이전 위치 평균인 에 0을 대입하고, 이동량 평균인 에 3을 대입하면 구할 수 있다 - 예측값 분산은
(2)에 이전 위치 분산을 에 대입하고, 이동량 분산을 에 대입하면 구할 수 있다
- 여기에서 합성곱 결과 함수도 정규분포를 따르고, 합성곱 결과 함수의 분산은 두 입력 정규분포의 분산보다 항상 크다는 것을 알 수 있다
- 즉, 합성곱을 수행할 때마다 분산이 증가한다 (=불확실도가 증가한다)
2. Measure
- 센서를 사용하여 현재 위치를 측정하는 단계이다
- 센서를 사용하여 측정한 측정값에도 noise, 즉 불확실도가 있기 때문에 정규분포로 표현할 수 있다
- 센서에서 측정한 로봇의 현재 위치가 라고 가정하면 아래와 같은 정규분포로 표현할 수 있다
3. Update
- 예측값과 측정값을 사용하여 최적값을 구하는 단계이다. 즉, 이전값을 갱신(update)하는 단계이다
- 이때 베이즈 정리(Bayes' theorem)를 사용하여 예측값 정규분포와 측정값 정규분포의 곱(product) 계산을 통해 최적값을 구한다
- 최적값 역시 정규분포로 표현할 수 있다
- 두 정규분포(측정값, 예측값)의 곱은 정규분포 모양이지만 정규분포는 아니다
- 하지만 아래의 베이즈 수식에서 볼 수 있듯이 를 나누어 정규화를 해주기 때문에 최적값도 정규분포가 된다
- 그 후 이 최적값이 1번의 predict 과정에서 로봇의 상태(위치)로 사용되고 1번부터 3번이 반복된다
베이즈 정리(Bayes' theorem)
- 베이즈 정리는 사전 정보(prior)와 관측(likelihood)를 사용하여 사후 확률(posterior)를 계산하는 것으로 이전 정보를 갱신하고 새로운 정보를 통합할 수 있다
- 베이즈 정리는 불확실성이 있는 상황에서 신뢰도 있는 값을 추정하기 위해 사용된다
- 칼만 필터는 상태를 확률 분포로 표현하고, 센서로 측정한 측정값도 오차가 있을 수 있다
- 이런 상황에서 확률 기반으로 값을 추정하는 베이즈 정리를 사용하면 현재 상태 추정에 대한 신뢰도를 표현할 수 있고 기존의 상태 추정과 통합하여 값을 갱신할 수 있다
- 베이즈 정리 수식
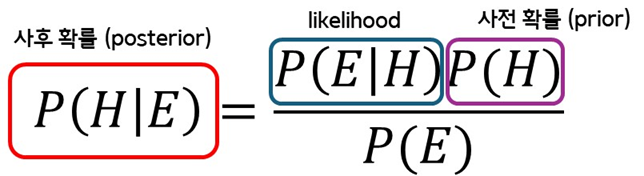
- 위의 예시(로봇의 위치 추정)에서의 의미
- : 최적값
- : 센서를 통해 측정한 측정값
- : 예측값 (state predict 과정에서 예측한 예측값)
- 즉, 최적값을 구하려면 측정값과 예측값의 곱을 계산해야한다
정규분포의 곱(product) 계산
- 를 정규분포로 표현하면 다음과 같다 (여기에서 은 정규분포, 는 평균, 는 분산을 의미한다)
- 는
- 는
- 정규분포의 곱 결과 분포를 라고 하면 그 계산 과정은 다음과 같다
- 위의 예시로 보면 가 예측값에 관한 함수, 가 측정값에 관한 함수이고 곱 결과는 최적값에 관한 함수이다
