뮤텍스
락을 획득하는 acquire() 과 락을 반환하는release()메서드를 가지고 있다. available 은 위에서 써왔던 lock 변수와 마찬가지로 프로세스가 임계구역에 들어갈 수 있는가 여부를 결정한다.
acquire() {
while (!available) {
// 대기
}
available = false
}release() {
available = true;
}while(true) {
acquire()
크리티컬 섹션 실행
release()
}acquire() 과 release() 는 원자적으로 실행되어야하므로 내부적으로 CAS연산을 사용한다고 한다.
세마포어
-
변수
S- 정수, 사용할 수 있는 공유자원의 개수를 의미- 카운팅 세마포어 : S가 2이상 / 이진 세마포어 : S가 1
-
wait(S)와signal(S)메서드 제공 (P(S)와V(S)로 부르기도) - 얘네도 당연히 원자적인 메서드들임
wait(S) {
while(S <= 0) {
// 대기
}
S--;
}signal(S) {
S++;
}Busy Waiting을 해결한 세마포어 - Block&Wakeup방식
세마포어를 스핀 락방식으로 구현할수도 있지만, 다른 방식으로도 구현할 수 있다.
while문을 돌며 락을 얻을 때까지 계속 대기하는 것이 아니라, 대기해야 할 경우 대기큐에 해당 프로세스를 집어넣고, 바로 다른 프로세스에게 cpu를 할당하는 것이다. 각 세마포어마다 대기큐를 가지고 있다면 구현이 가능하다. (+ block()과 wakeup(P) 메서드 추가)
typedef struct {
int value;
struct Process *list;
} Semaphore;// 변경된 wait(S)
wait(Semaphore *S) {
S.value--;
if (S.value < 0) { // 공유 자원들이 이미 전부 사용중이라면
S.list.push(this);
block()
}
}- 세마포어 변수가 음수가 될 수 있다. 음수일 경우 S를 얻기위해 대기중인 프로세스의 수가 된다.
// 변경된 signal(S)
signal(Semphore *S) {
S.value++;
if (S.value <= 0) { // 누군가가 대기중이라면
Process nextProcess = S.list.pop();
wakeup(nextProcess);
}
}- 이전 방식의
S가 사용할 수 있는 자원의 개수를 의미한다면, 위 방식의S는 자원을 사용하기 위해 대기중인 프로세스의 개수에 초점이 맞춰져있다.
BusyWaiting vs Block&Wakeup
Block&Wakeup또한 프로세스를 block하고 wakeup하는 오버헤드가 존재하나 일반적으로 BusyWaiting보다 효율적인듯. 다만 이전 포스팅에서 언급했듯이 대기 시간이 짧다면 BusyWaiting이 더 효율적일수도 있다...
뮤텍스 & 세마포어의 문제
개발자의 능지 이슈
세마포어는 wait(S)이후에 signal(S)를 실행해야 올바르게 동작한다. 그러나 개발자의 실수로 두 연산의 순서를 바꾼다면 여러 개의 프로세스가 동시에 임계구역에 진입할 수도 있다.
signal(mutex);
크리티컬 섹션 진행
wait(mutex);즉, 개발자가 직접 signal(S), wait(S)와 같은 메서드들을 호출하는 것이 문제이다!!!
때문에 signal(S), wait(S)를 개발자가 직접 호출하지 않고, 더~~~ 추상화된 메서드를 제공하는 모니터가 존재한다.
모니터
모니터는 내부 메서드를 사용했을 때만 공유데이터에 접근할 수 있게 강제한다. 개발자가 직접 wait(S), signal(S)을 안해도 되는 추상자료형이 모니터다.
모니터는 공유 데이터, 공유 데이터에 접근하는 메서드, condition 변수로 이루어져있다.
-
모니터는 항상 하나의 프로세스만 내부 메서드에 접근할 수 있게 강제한다. 때문에 개발자가 락을 걸 필요가 없다. 혼자 알아서 Lock 개념을 사용한다. 세마포어와 가장 큰 차이~ (물론 모니터 내부적으로 세마포어 쓰고있긴 함~)
-
모니터는 하나 이상의
condition변수를 가진다.condition은 큐를 가지고 있으며, PCB들을 저장해 특정 자원에 접근하기 위해 대기하는 프로세스들을 관리한다.condition변수는wait()와signal연산을 통해서만 접근이 가능하다.
예시를 통해 이해해보자. Bounded-Buffer 문제를 세마포어와 모니터를 사용해 해결해보자.
세마포어를 사용한 Bounded-Buffer문제 해결
(Bounded-Buffer문제 설명은 아래 챕터에~~)
empty와full은 대기중인 프로세스의 수를 나타내기 위한 세마포어 변수(카운팅 세마포어)mutex임계 구역에 들어갈 수 있는지 여부를 나타내는 세마포어 변수(이진 세마포어)
empty = N; (0~N)
full = 0; (0~N)
mutex = true;// Producer
while(true) {
wait(empty);
wait(mutex);
buffer.push(value);
signal(mutex);
signal(full);
}// Consumer
while(true) {
wait(full);
wait(mutex);
int value = buffer.pop();
signal(mutex);
signal(empty);
}모니터를 사용한 Bounded-Buffer문제 해결
Monitor BoundedBuffer {
int buffer[N];
condition full, empty;
void produce(int value) {
if (empty.isFull()) {
empty.wait();
}
empty.push(value);
full.signal();
}
int consume() {
if (full.isFull()) {
full.wait();
}
int value = full.pop();
empty.signal();
return value;
}
}Signal and wait & Signal and continue
프로세스 A와 B가 있다고 하자. 어떤 모니터의 condition에서 프로세스B가 대기중이다.
프로세스 A가 모니터의 condition.signal() 을 실행하면, B는 바로 실행될까? A의 코드가 전부 끝난 이후에 실행되어야 할까?
Signal and wait은 A가 signal을 호출한 후에 wait상태가 되는 것을 의미하고,Signal and continue는 A가 signal을 호출해도 계속 A의 코드를 이어서 실행하는 것을 의미한다.
어떤 게 더 좋을까?! 잘 모르겠다~ Signal and wait 은 signal()을 호출할 때마다 대기해야하니 컨텍스트 스위칭 비용이 더 높을 수도 있고, Signal and continue는 continue하는 동안 B가 다시 대기 상태에 빠져버리는 경우가 생길수도 있다.
Java는 기본적으로 Signal and continue 방식을 사용한다는듯
Deadlock & Starvation
위 상황의 경우, 상대 프로세스가 먼저 자원을 획득하고 있어 데드락이 발생할 수 있다.
두 프로세스가 S -> Q와 같이 wait하는 순서를 동일하게 맞춘다면 데드락이 발생하지 않으나, 개발자가 항상 자원의 획득 순서를 염두하고 있어야한다는 불편함이 있다. (이외 해결방안은 나중에 ~...)
또한, 여전히 Starvation문제도 존재한다. 프로세스가 세 개 이상일 때, 각 프로세스를 실행하는 데 우선순위가 있다면, 우선순위가 늦은 프로세스는 오래 대기할 수도 있다. <- 에이징으로 해결 가능
고전적인 동기화 문제들
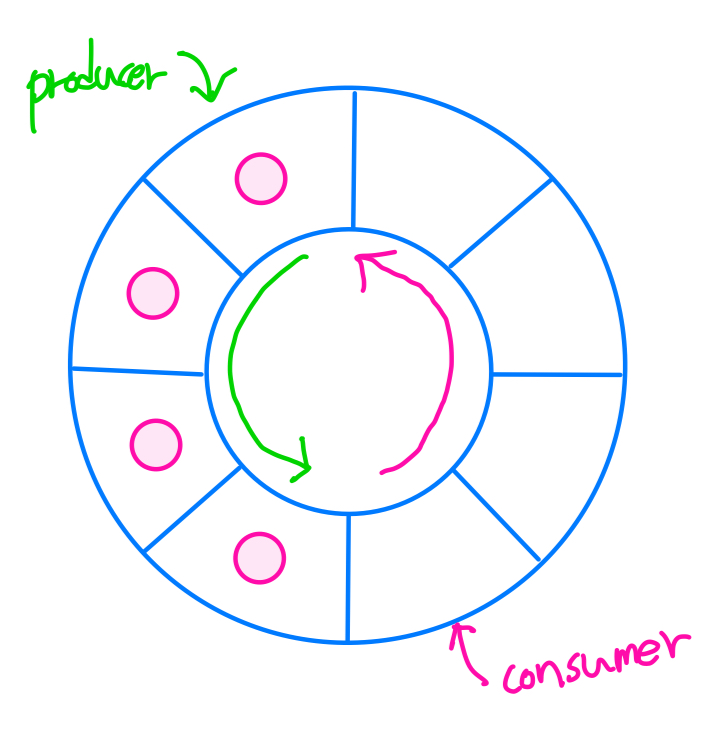
유한 버퍼 문제(Bounded-Buffer Problem)
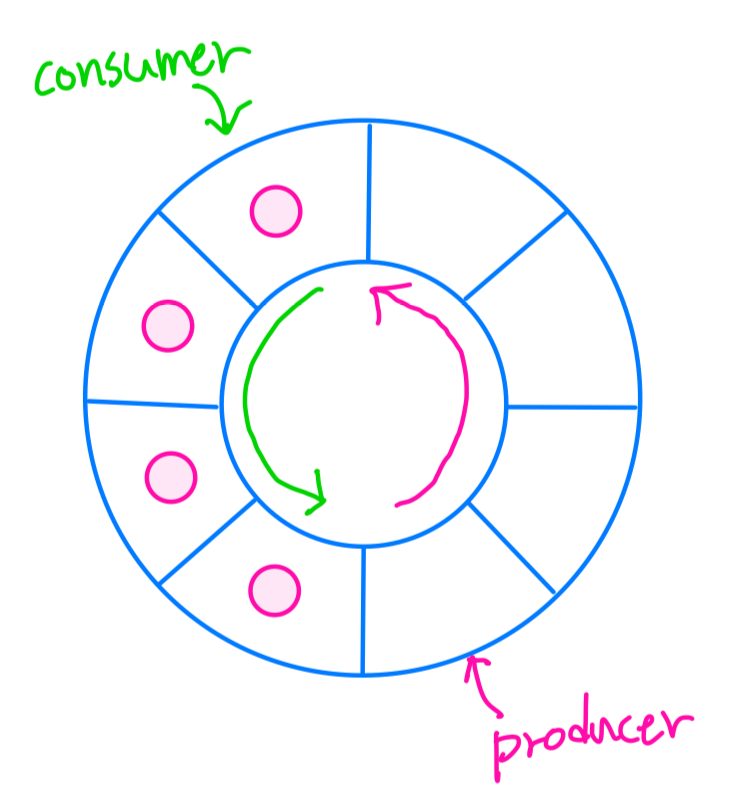
여러 개의 생산자와 소비자가 존재하는 버퍼가 있을 때 생산자들간의 경쟁, 소비자들간의 경쟁을 해결해야한다.
- 하나의 생산자만 버퍼에 데이터를 쓸 수 있다, 버퍼가 가득차면 생산자는 대기해야한다. -> 쓰기 작업 대기 관리 필요
- 하나의 소비자만 버퍼에서 데이터를 읽을 수 있다, 버퍼가 비어있으면 소비자는 대기해야한다. -> 읽기 작업 대기 관리 필요
- 생산자가 버퍼에 데이터를 쓸 때는 소비자가 데이터를 읽어올 수 없다. (반대의 상황도 마찬가지) -> 버퍼 접근에 대한 락 필요
이전 포스팅에서 나왔었지만, 세마포어로 구현하면 다음과 같다.
쓰기와 읽기 작업에 대한 대기를 관리하기 위해 full과 empty 세마포어를 사용했다. ( 0 <= full, empty<= N)
버퍼 접근을 관리하기 위해 mutex 세마포어를 사용했다. ( mutex = 0 or 1)
// Producer
while(true) {
wait(empty);
wait(mutex);
buffer.push(value);
signal(mutex);
signal(full);
}// Consumer
while(true) {
wait(full);
wait(mutex);
int value = buffer.pop();
signal(mutex);
signal(empty);
}Readers-Writers 문제
- Reader들끼리는 DB에 동시에 접근할 수 있다.
- Writer가 DB에 접근할 때는 다른 프로세스들이 접근할 수 없다.
세마포어 코드 예시
rw_mutex: Writer를 독립적으로 실행하기 위한 이진 세마포어
// Writer
while(true) {
wait(rw_mutex);
쓰기 작업
signal(rw_mutex);
}mutex: read_count를 조회, 갱신하는 것을 원자적으로 수행하기 위한 이진 세마포어
// Reader
while(true) {
wait(mutex);
read_count++;
if (read_count == 1) { // 최초로 진입하는 reader
wait(rw_mutex);
}
signal(mutex);
읽기 작업
wait(mutex);
read_count--;
if (read_count == 0) { // 마지막으로 빠져나가는 reader
signal(rw_mutex);
}
signal(mutex);
}위 코드의 문제 - Starvation
위 코드는 임계 구역에 들어가 있는 Reader가 있을 경우, 다른 Reader들이 락을 얻지 않고도 바로 조회할 수 있는 구조이다. 때문에 어떤 Reader가 임계구역을 빠져나가기 전에, 다른 Reader들이 계속 들어온다면, Writer가 실행되지 못할 수도 있다.
Starvation 해결 방안
- Writer가 임계 구역 진입 요청을 하면 새로운 Reader는 임계 구역에 들어가지 못하게 한다. -> 반대로 Reader Starvation 일어남
- 동시에 임계 구역에 접근할 수 있는 Reader의 수를 제한
- Reader들이 임계 구역에 들어갈 수 있는 시간을 제한
- 또 다시 등장하는 우선순위와 에이징
Reader-Writer 락은 Writer보다 Reader의 개수가 많을 때 유용하다. 일반적인 세마포어보다 Reader-Writer의 오버헤드가 크기 때문에 Reader의 개수가 적으면 비효율적일 수 있으나, Reader의 개수가 많다면 여러 개의 Reader가 락을 얻지 않고도 실행 가능하기 때문.
식사하는 철학자들 문제(The Dining-Philosophers Problem)
N명의 철학자와 N개의 젓가락이 있을 때, 각 철학자들이 양 옆의 젓가락을 사용해서 식사하는 경우 발생하는 동기화 문제이다.
- 철학자는 한 번에 한 개의 젓가락만 집는 것도 가능하다. 꼭 두 젓가락을 동시에 집을 필요는 없다. (물론 식사는 두 젓가락이 있어야만 가능)
세마포어 코드 예시 - 데드락 위험
chopsticks[i]: 각 젓가락에 대한 접근 권한을 나타내는 이진 세마포어
while (true) {
wait(chopstick[i]);
wait(chopstick[(i+1) % 5]);
식사
signal(chopstick[i]);
signal(chopstick[(i+1) % 5]);
}이 경우 모든 철학자들이 자신의 왼쪽에 있는 젓가락을 잡으면 데드락 발생.
데드락 해결 방안이 있긴 함
- 한 번에 같은 방향의 젓가락을 못 집게 하면 됨. (ex. 짝수번째 철학자는 오른쪽 젓가락을 먼저 집고, 홀수번째 철학자는 왼쪽 젓가락을 먼저 집는다.)
- 철학자 수를 한 명 줄임.
- 젓가락을 집을 때 양 쪽의 젓가락을 모두 집을 수 있을 때만 집게 함.
근데 위 처럼 해도 starvation까지 해결되는 건 아님.
모니터 코드 예시
enum {THINKING, HUNGRY, EATING} state [N];- i번째 철학자가 HUNGRY상태이고, 양쪽 철학자들이 식사하지 않을 때만
state[i] = EATING으로 설정할 수 있다.
- i번째 철학자가 HUNGRY상태이고, 양쪽 철학자들이 식사하지 않을 때만
condition self[N];- 식사하고 싶은 철학자들이 대기하기 위한 변수
Monitor DiningPhilosophers {
enum {THINKING, HUNGRY, EATING} state [N];
condition self[N];
void pickup(int i) {
state[i] = HUNGRY;
test(i);
if (state[i] != EATING) {
self[i].wait(); // 인접한 철학자가 젓가락을 다 사용한 후에 깨워줘야함
}
}
void putdown(int i) {
state[i] = THINKING;
test((i+1) % N); // 식사후에는 대기중인 인접한 철학자들을 깨워줌
test((i+N-1) % N);
}
void test(int i) {
if(state[(i+1) % N] != EATING && state[(i+N-1) % N] != EATING && state[i] == HUNGRY) {
state[i] = EATING;
self[i].signal(); // signal()은 대기중인 애들이 없다면 아무 작업도 하지 않는다
}
}
}DiningPhilosophers.pickup(i);
식사
DigingPhilosophers.putdown(i);위 코드의 경우 양 옆의 젓가락을 동시에 잡을 수 있는 상황에서만 젓가락을 집으므로 데드락이 발생하지는 않는다. 물론 starvation 문제가 생길 수는 있음. (starvation 해결하려면 또선순위 설정하던가, 대기리스트에 배고픈 철학자들 다 집어넣고, 누가 젓가락 내려놓을 때 대기리스트 순회하면서 식사 가능한 애들한테 권한 주던가~~)
Java에서의 동기화
Java 모니터
Java에서는 synchronized 메서드와 블럭을 사용해 하나의 스레드만 임계 구역에 진입하게 할 수 있다. synchronized는 Java 모니터를 사용한다. 인스턴스와 연결된 락을 획득해야만 임계 구역에 진입할 수 있고, 진입 집합(entry set)과 대기 집합이라는 것을 제공한다.
-
synchronized블록 또는 메서드를 벗어나면 자동으로 락이 해제된다. 예외가 발생하더라도 자동으로 락이 해제된다. (finally문 쓰는듯) -
진입 집합: 스레드A가 락을 획득하려는데, 다른 스레드가 이미 락을 사용중일 경우, 스레드A는 진입 집합으로 들어간다. -
대기 집합: 락을 얻는 조건은 만족할 수 있지만, 특정 조건이 충족되지않아 코드를 더 이상 실행할 수 없는 스레드는 대기 집합으로 들어간다. ("특정 조건이 충족되지 않았다"의 예시: 버퍼의 Reader인데 버퍼가 비어있을 경우)
synchronized내부에서는 wait(), notify(), notifyAll()메서드를 사용할 수 있다.
-
wait(): 스레드를 대기 집합으로 넣는다.- 스레드가 획득했던 락을 반환한다.
- 스레드의 상태를 "봉쇄됨"으로 변경한다.
- 스레드를 대기 집합에 넣는다.
-
notify(): 대기 집합의 스레드를 진입 집합으로 옮긴다.-
대기 집합에서 임의의 스레드A를 선택한다.
-
A를 대기 집합에서 진입 집합으로 옮긴다.
-
A의 상태를 "봉쇄됨"에서 "실행 가능"으로 변경한다.
-
재진입 락(Reentrant Locks)
공유 자원에 대한 상호 배타적 접근을 제공한다. 명시적으로 락을 획득하고 해제하는 메서드(lock()과 unlock())를 제공한다. 즉, 개발자가 직접 락의 획득, 해제를 관리하는데 장점일수도 단점일수도~~~ 예외 발생 시 자동으로 락을 해제하지 않으므로, finally 블록 내에서 unlock()을 명시적으로 호출해야 한다.
Java모니터와 달리 락의 상태를 확인하거나, 락 획득 시 시간 제한을 설정하는 등 더 세밀한 제어가 가능하다.
- 공정성 설정 가능 : 오래 기다리는 스레드에게 우선적으로 락을 줄 수 있다.
new ReentrantLock(true); // 공정한 락 설정생성할 때, true 넣으면 오래 기다리는 애 우선적으로 락 주는듯
- 조건 변수 지원 :
Condition객체를 사용해 다양한 조건에 따른 스레드 대기 및 깨우기가 가능하다.
Lock lock = new ReentrantLock();
Condition condition = lock.newCondition();
// condition은 await()와 signal()을 가진다.
condition.await();
condition.signal();세마포어
Semaphore객체 생성 가능.
Semaphore sem = new Semaphore(1); // 세마포어 초기값 할당. 음수도 가능.
try {
sem.acquire();
크리티컬 섹션
} catch (InterruptedException e) {
...
} finally {
sem.release();
}