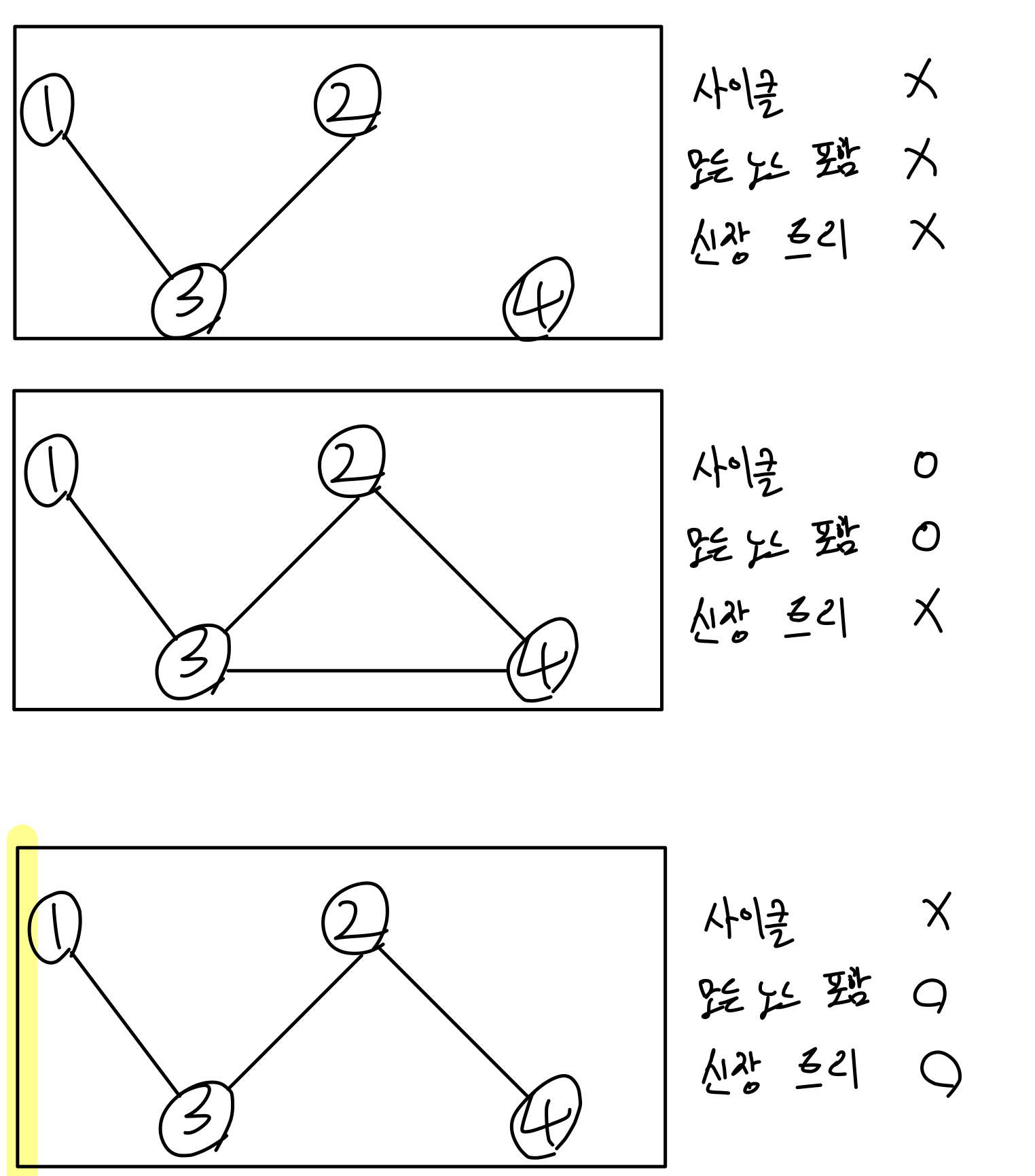
신장 트리
하나의 그래프가 있을 때 모든 노드를 포함하면서 사이클이 존재하지 않는 부분 그래프
최소 신장 트리 (Minimum Spanning Tree, MST)
최소한의 비용으로 신장 트리를 찾아야 할 때가 있다.
예를 들어 2개의 도시A에서 도시B로 이동하는 경로가 반드시 존재하도록 도로를 설치하고자 하고, 모든 도시를 '연결'할 때, 최소한의 비용으로 연결하려는 경우가 있다.
대표적인 최소 신장 트리 알고리즘으로는 크루스칼 알고리즘(Kruskal Algorithm)이 있다.
- 최소 신장 트리는 노드가 N개일 때, 항상 간선의 개수가 N-1개이다.
아이디어 :
- 간선 데이터를 비용에 따라 오름차순으로 정렬한다.
- 간선을 하나씩 확인하며 현재의 간선이 사이클을 발생시키는지 확인한다.
1) 사이클이 발생하지 않는 경우 최소 신장 트리에 포함시킨다.
2) 사이클이 발생하는 경우 최소 신장 트리에 포함시키지 않는다. - 모든 간선에 대하여 2. 과정을 반복한다.
(n개의 노드가 있을 때, n-1개의 간선을 찾았으면 break)
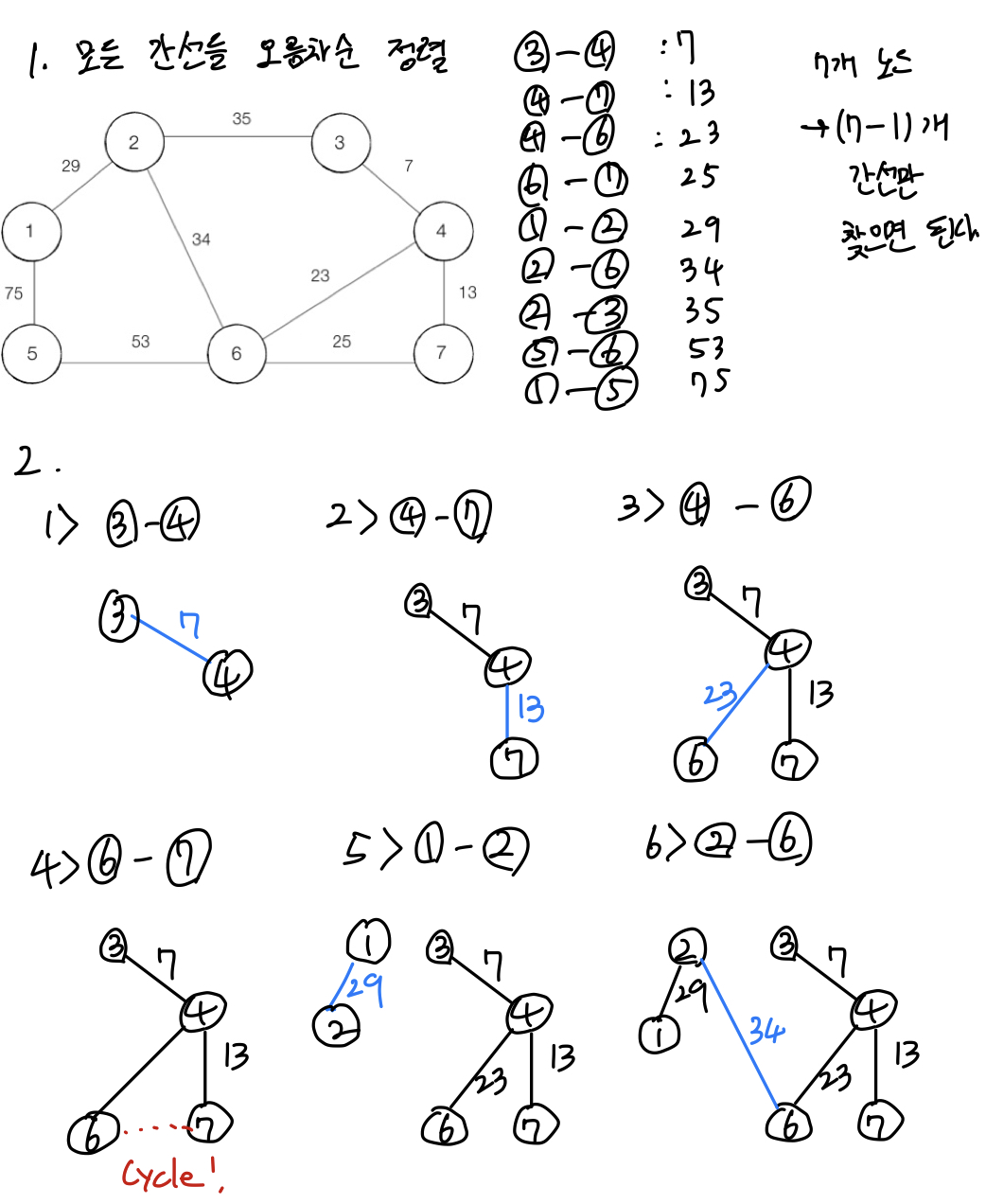
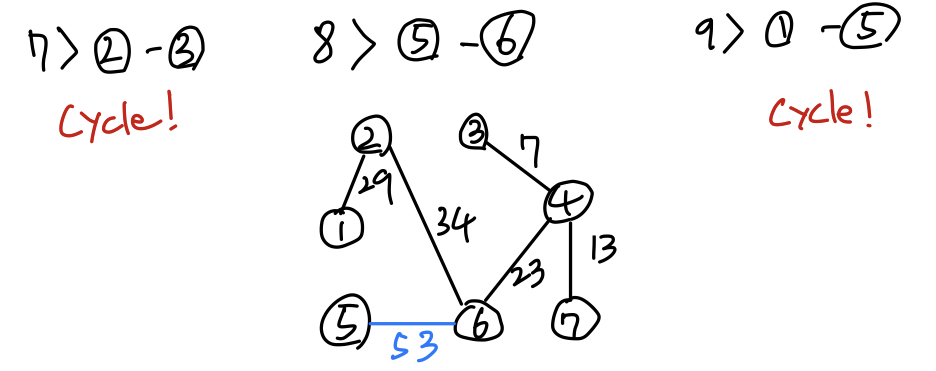
노드의 개수가 7개이고, 찾아야할 간선의 개수는 7-1 = 6이므로
9> 를 수행하지 않았어도 됐다. (8>에서 6개의 간선을 모두 찾았기 때문)
시간 복잡도 :
크루스칼 알고리즘은 간선의 개수가 E개일 때, 의 시간 복잡도를 가진다.
왜냐하면 크루스칼 알고리즘에서 가장 오래 걸리는 부분이 모든 간선을 오름차순 정렬하는 작업이기 때문이다.
서로소 집합 알고리즘은 정렬 알고리즘보다 작으므로 무시한다.
cpp로 구현한 크루스칼 알고리즘 :
#include <iostream>
#include <vector>
using namespace std;
int find_parent(int* _parent, int _data) {
if(_parent[_data] != _data) {
_parent[_data] = find_parent(_parent, _parent[_data]);
}
return _parent[_data];
}
void union_parent(int* _parent, int _v1, int _v2) {
int v1_parent = find_parent(_parent, _v1);
int v2_parent = find_parent(_parent, _v2);
if(v1_parent < v2_parent) {
_parent[_v2] = _v1;
}
else {
_parent[_v1] = _v2;
}
}
int main(void){
int v, e;
int* parent = new int[v+1];
vector<pair<int, pair<int, int>>> edges; // cost, {v1, v2}
int res = 0;
cin >> v >> e;
for (int i = 0; i < v+1; i++)
{
parent[i] = i;
}
for (int i = 0; i < e; i++)
{
int v1, v2, cost;
cin >> v1 >> v2 >> cost;
edges.push_back({cost, {v1, v2}});
}
// 간선 오름차순 정렬
sort(edges.begin(), edges.end());
for (int i = 0; i < edges.size(); i++)
{
int cost = edges[i].first;
int v1 = edges[i].second.first;
int v2 = edges[i].second.second;
if(find_parent(parent, v1) == find_parent(parent, v2)){
continue;
}
else {
union_parent(parent, v1, v2);
cout << v1 << " --- " << v2 << endl;
res += cost;
}
}
cout << "total cost : " << res << endl;
return 0;
}
Efficient Deep Learning