https://cafe.naver.com/openrt/24274
1. ROS 2의 좌표 표현 통일의 필요성
로봇의 센서로 카메라를 사용할 때, 카메라에서는 CV에서 사용하는 z forward, x right, y down가 기본 좌표계이다.
그런데 ROS 전반적으로는 x forward, y left, z up이 기본 좌표계이다.
좌표 표현을 통일하지 않으면 당연히 문제가 발생하기 쉽다.
2. ROS 2 좌표 표현: 기본 규칙
오른손 법칙이다.
회전축의 경우 이 오른손 법칙,
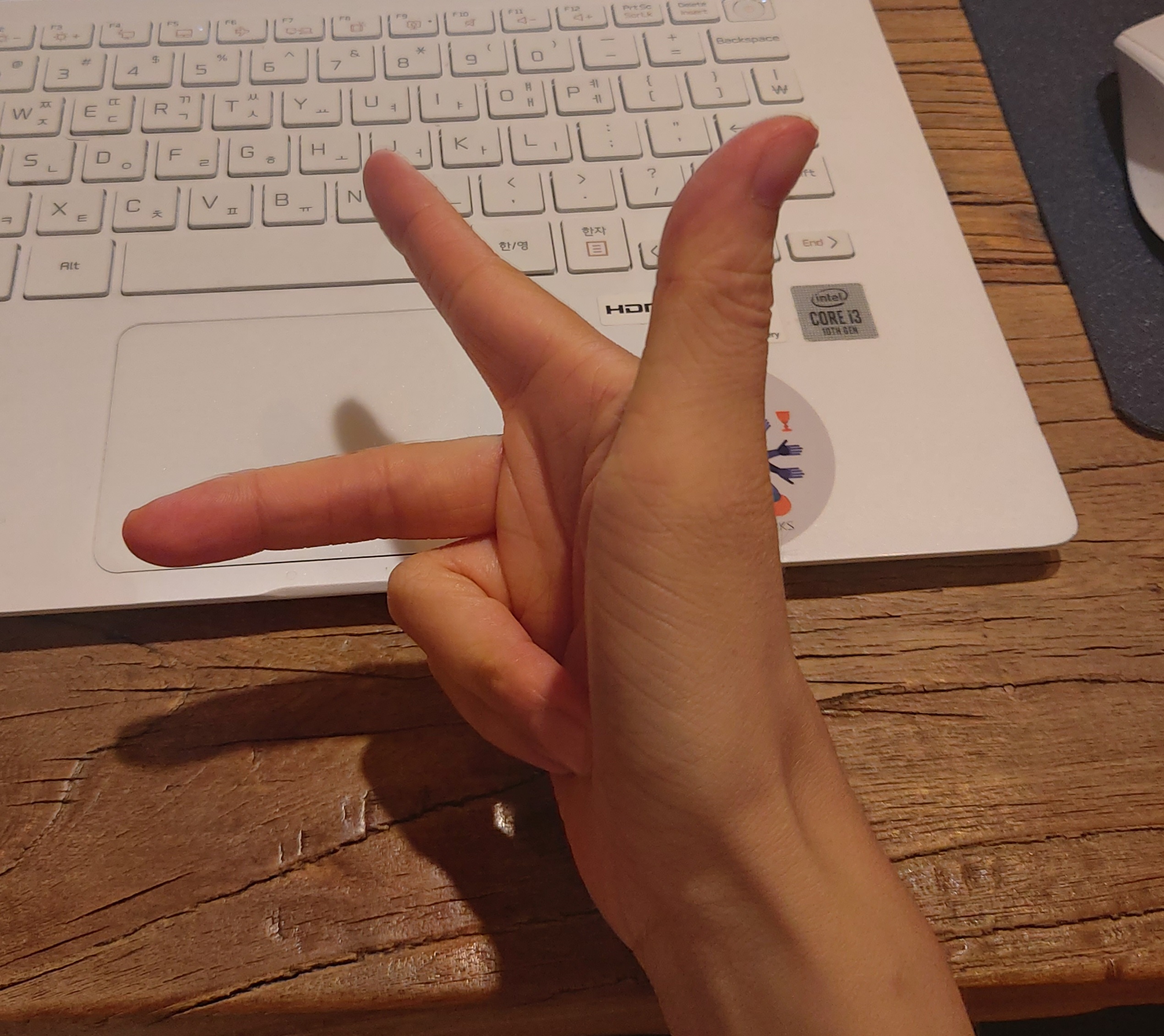
그리고 여기 오른손 법칙에서 손가락을 감는 반시계 방향이 정회전(+) 방향이다.
3. ROS 2 좌표 표현: 축방향
(1)기본: x forward(RED), y left(GREEN), z up(BLUE)
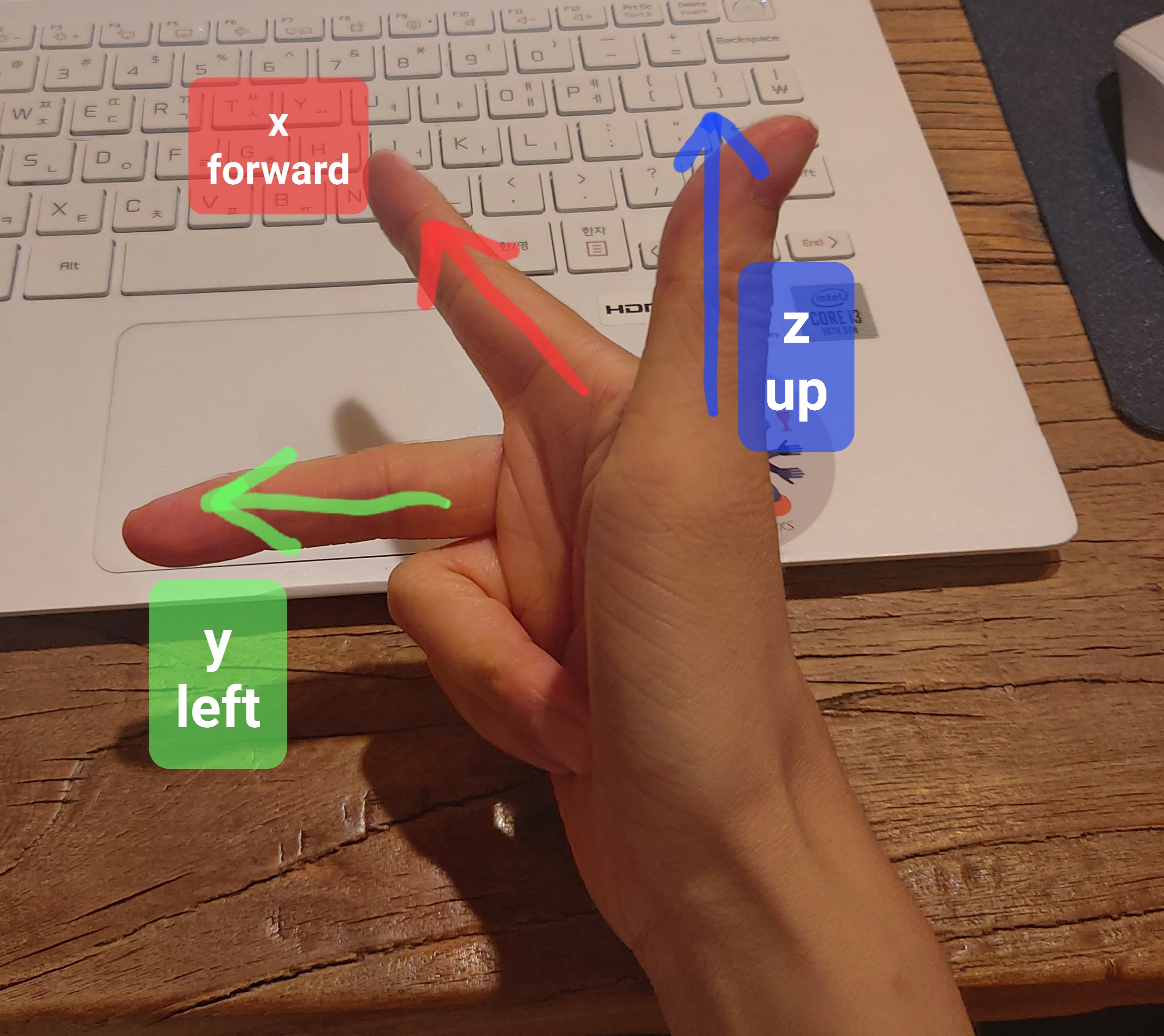 Gazebo등의 시각화 툴에서 헷갈리지 않도록 색깔도 지정된 대로 사용한다.
Gazebo등의 시각화 툴에서 헷갈리지 않도록 색깔도 지정된 대로 사용한다.
(2)ENU(East North Up)
-드론, 실외 자율주행 로봇 등에서 사용한다. 평상시에는 잘 사용하지 않는다.
(3)예외: 접미사 사용
-_optical: 카메라 센서의 경우, CV에서 사용하는 z forward, x right, y down을 사용하고 해당 센서의 메시지 뒤에 _optical을 붙여 표시한다.
-_ned: ENU가 아니라 NED(North East Down)을 사용해야 하는 경우가 있는데, 그 경우 뒤에 _ned를 붙인다.

할수이따 ~