https://cafe.naver.com/openrt/24065
2. Turtlesim 패키지 설치
$ sudo apt update
$ sudo apt install ros-foxy-turtlesim3. Turtlesim이란?
ROS를 처음 접하는 유저들에게 튜토리얼로 제공하기 위해 제작된 학습용 ROS 패키지.
패키지, 노드, 토픽, 서비스, 액션, 파라미터에 대한 기본적인 학습 및 CLI 툴, rqt 툴 연동을 체험해볼 수 있다.
4. Turtlesim 패키지와 노드
$ ros2 pkg list패키지 리스트 확인(이미 설치된 패키지 및 본인이 직접 작성한 패키지까지 포함)
$ ros2 pkg executables turtlesimturtlesim 패키지에 포함된 노드가 어떤 것들이 있는지 확인
5. Turtlesim 패키지의 노드 실행
$ ros2 run turtlesim turtlesim_node
$ ros2 run turtlesim turtle_teleop_key
6. 노드, 토픽, 서비스, 액션의 조회
5의 노드를 여전히 실행시킨 상태에서 진행하자.
$ ros2 node list
$ ros2 topic list
$ ros2 service list
$ ros2 action list7. rqt_graph로 보는 노드와 토픽의 그래픽 뷰
5의 노드를 여전히 실행시킨 상태에서 진행하자.
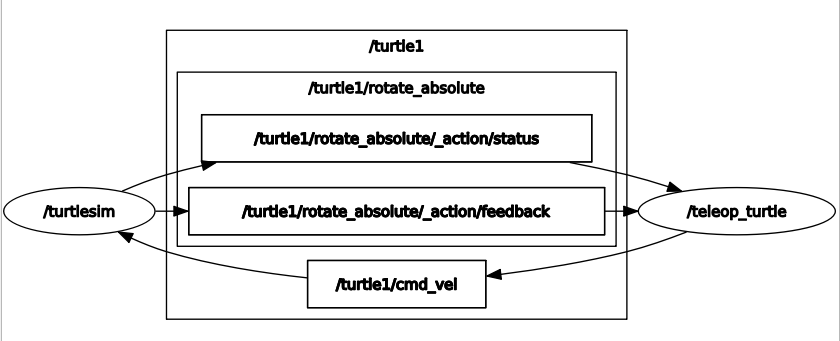
$ rqt_graph현재 개발 환경에서의 모든 노드와 토픽, 액션을 그래프 뷰로 확인 가능
동그라미는 노드.
네모는 토픽/액션.
서비스는 필요시 순간적으로 사용되는 형식이라 표시 안됨

할수이따 ~