
12 11 정자역 앞에서 찍은 사진
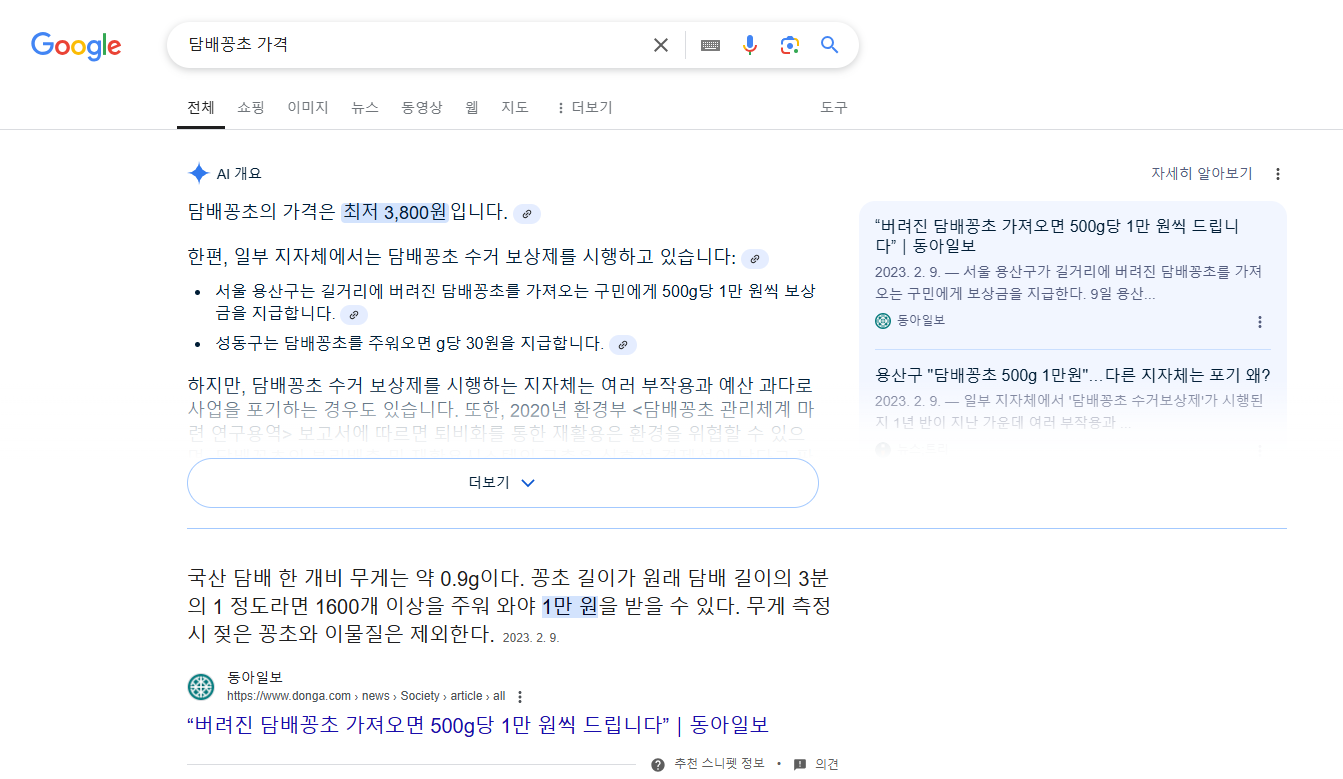
1600개가 1만원이라면, 1개의 가격은 1만원 ÷ 1600개 = 6.25원입니다.
따라서 45억 개의 가격을 계산하면:
45억 개 × 6.25원 = 281,250,000원 (약 2억 8125만원)
따라서 45억 개는 약 2억 8125만원입니다.
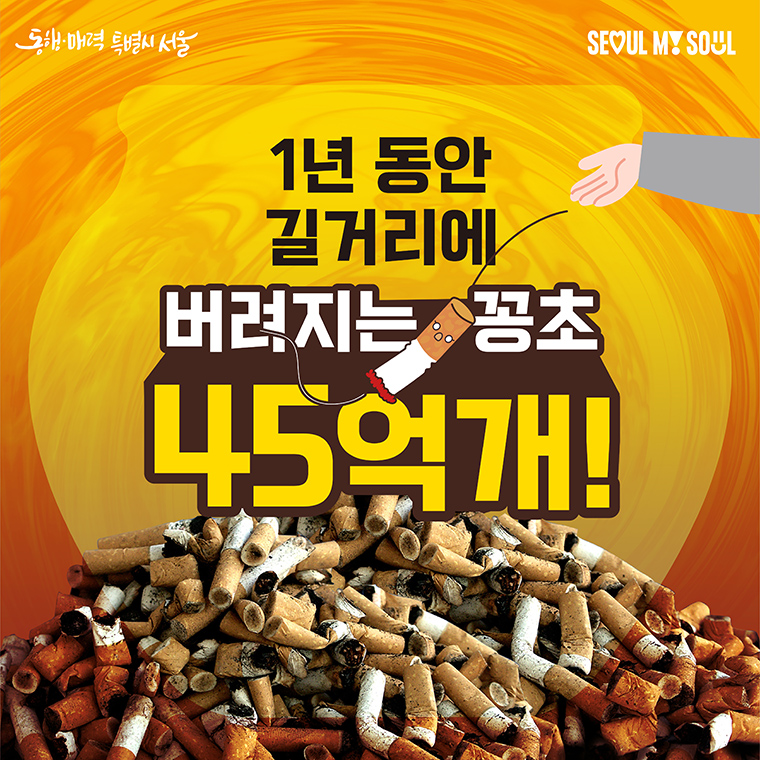
모두가 담배꽁초를 버린건 아니겠지만,
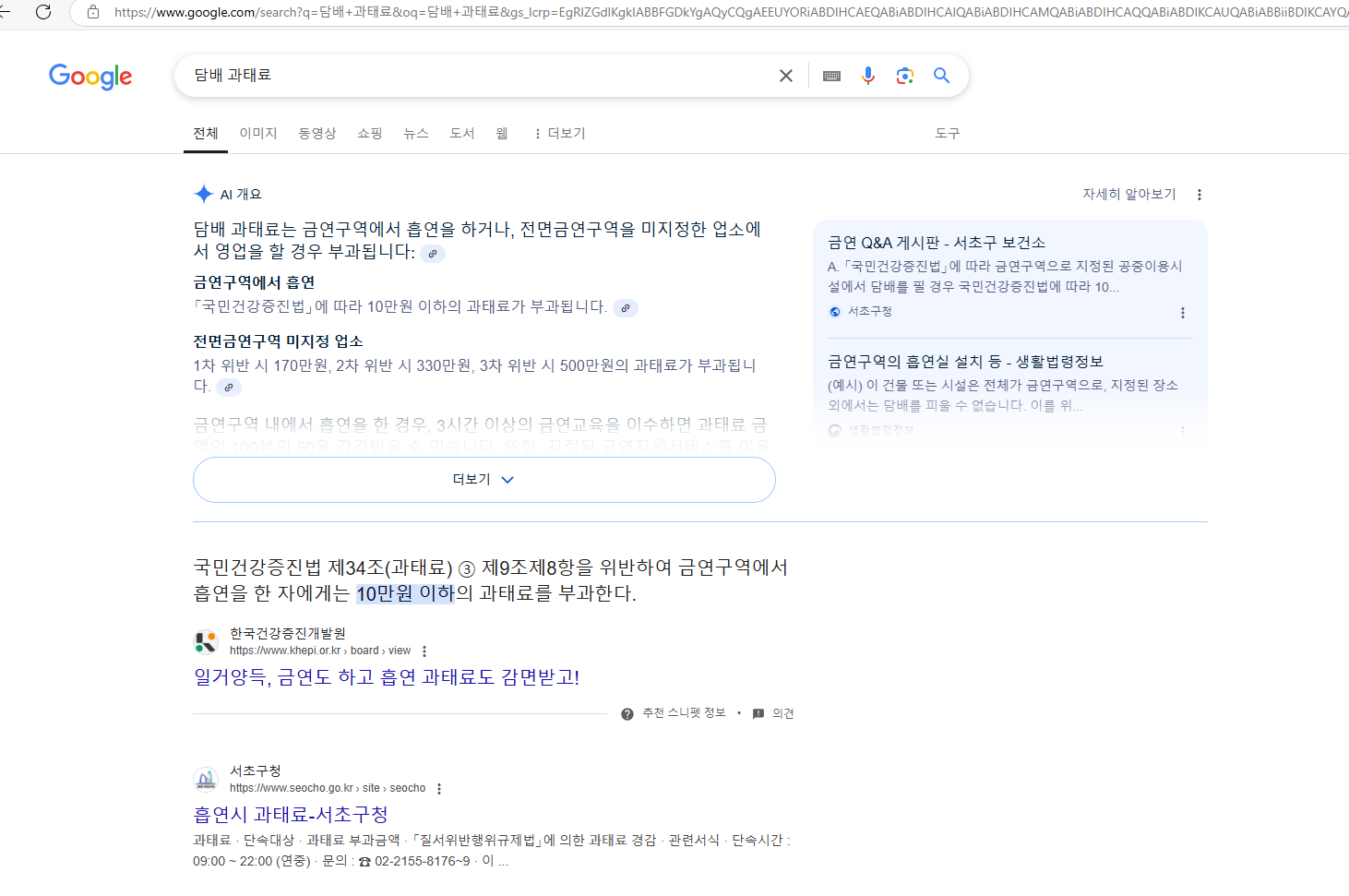
과태료 세금
45억 개 × 10만원을 계산하면:
45억 = 4,500,000,000
4,500,000,000 × 100,000 = 450,000,000,000,000
따라서, 45억 개 × 10만원은 45조 원입니다.
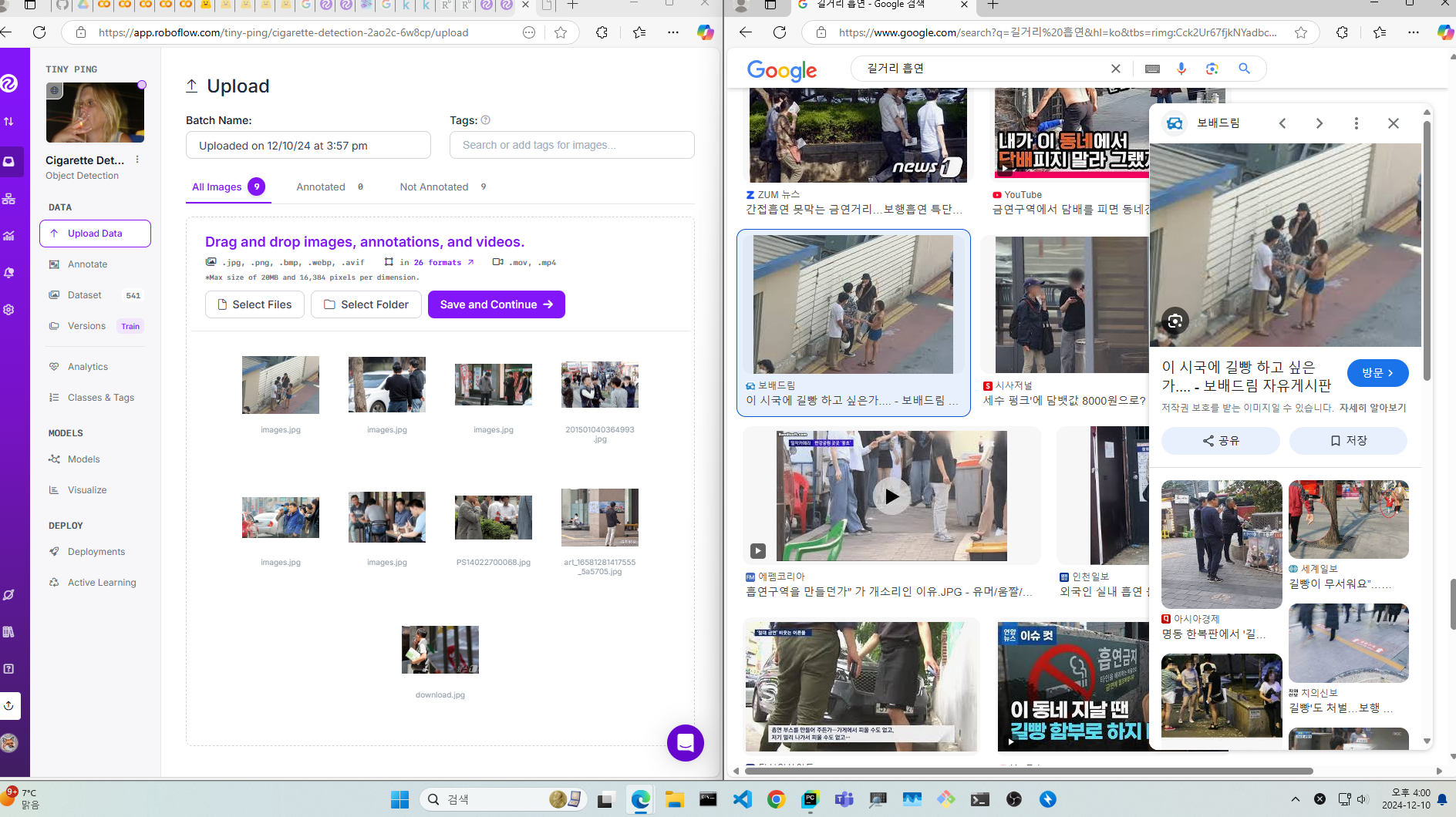
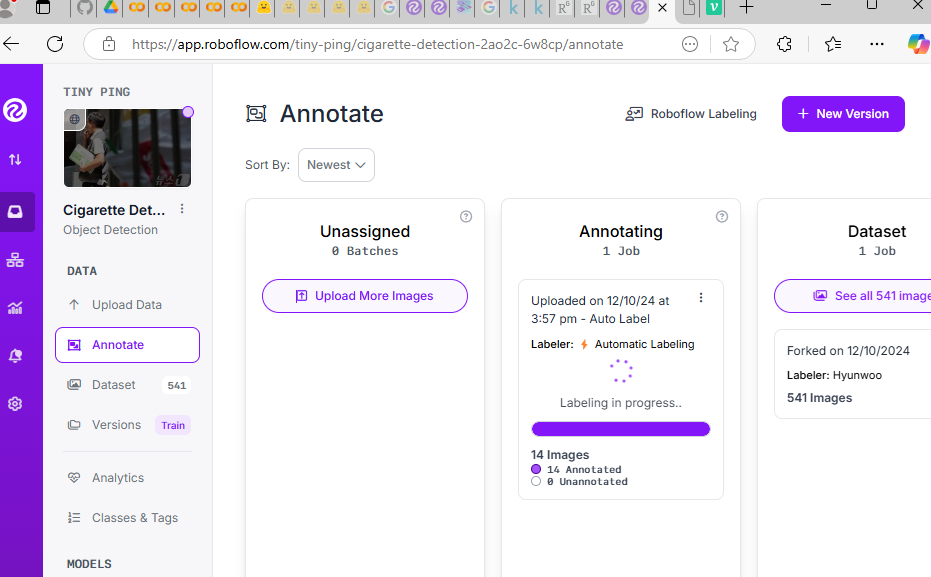

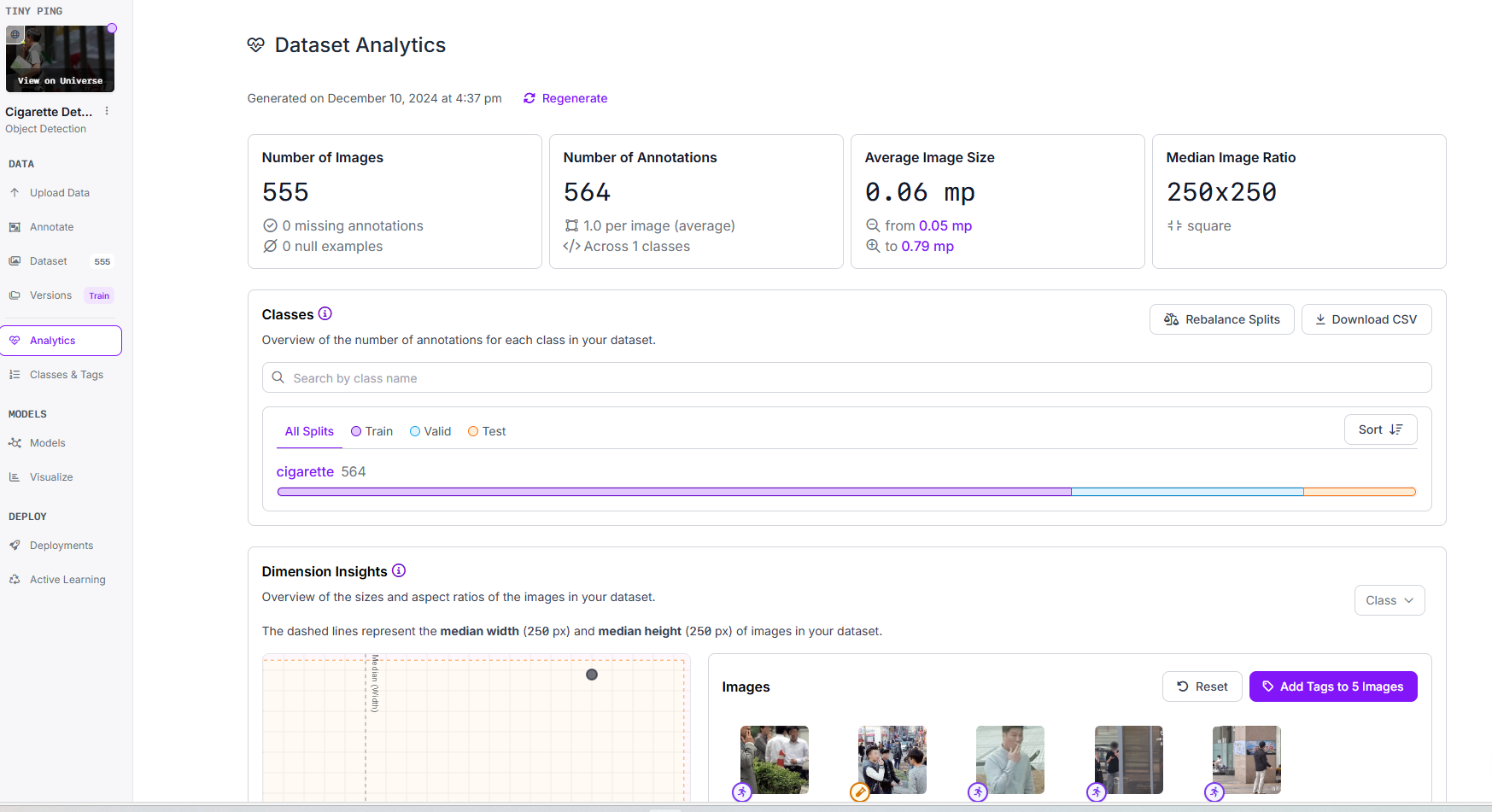
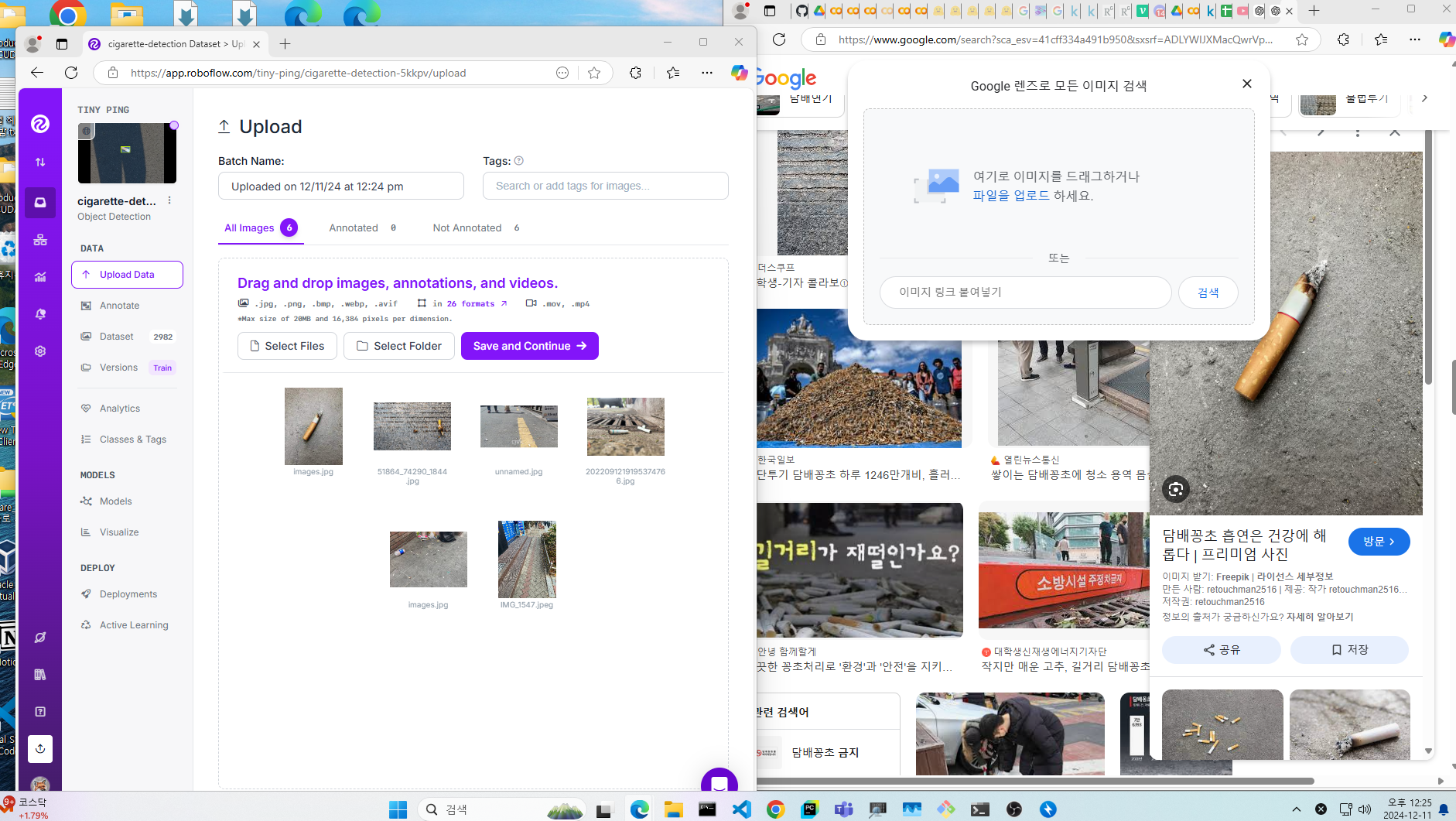
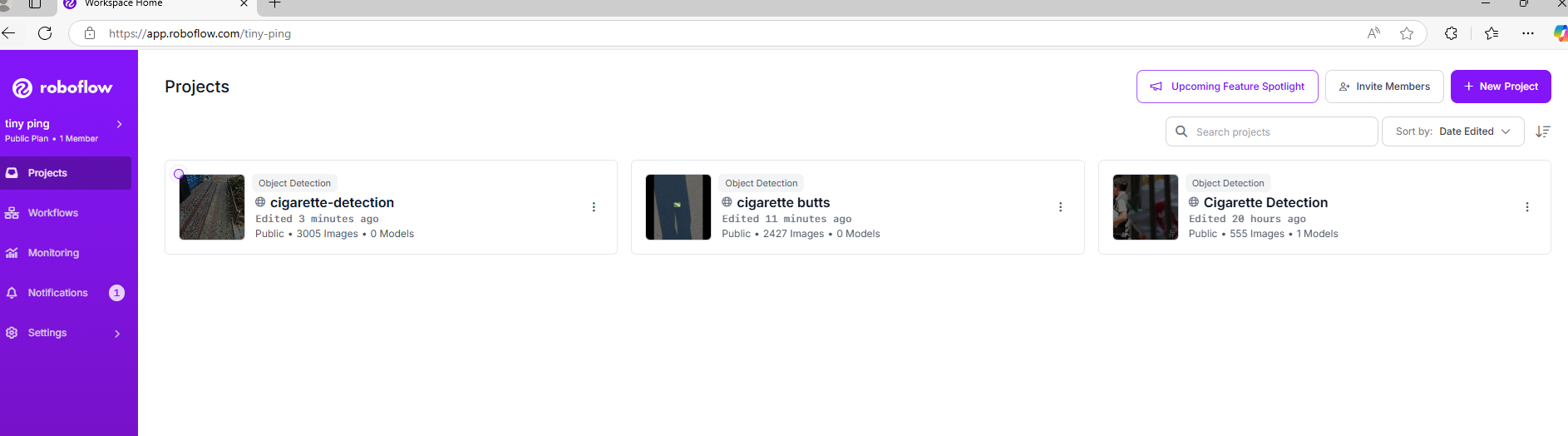
https://universe.roboflow.com/tiny-ping/cigarette-detection-2ao2c-6w8cp
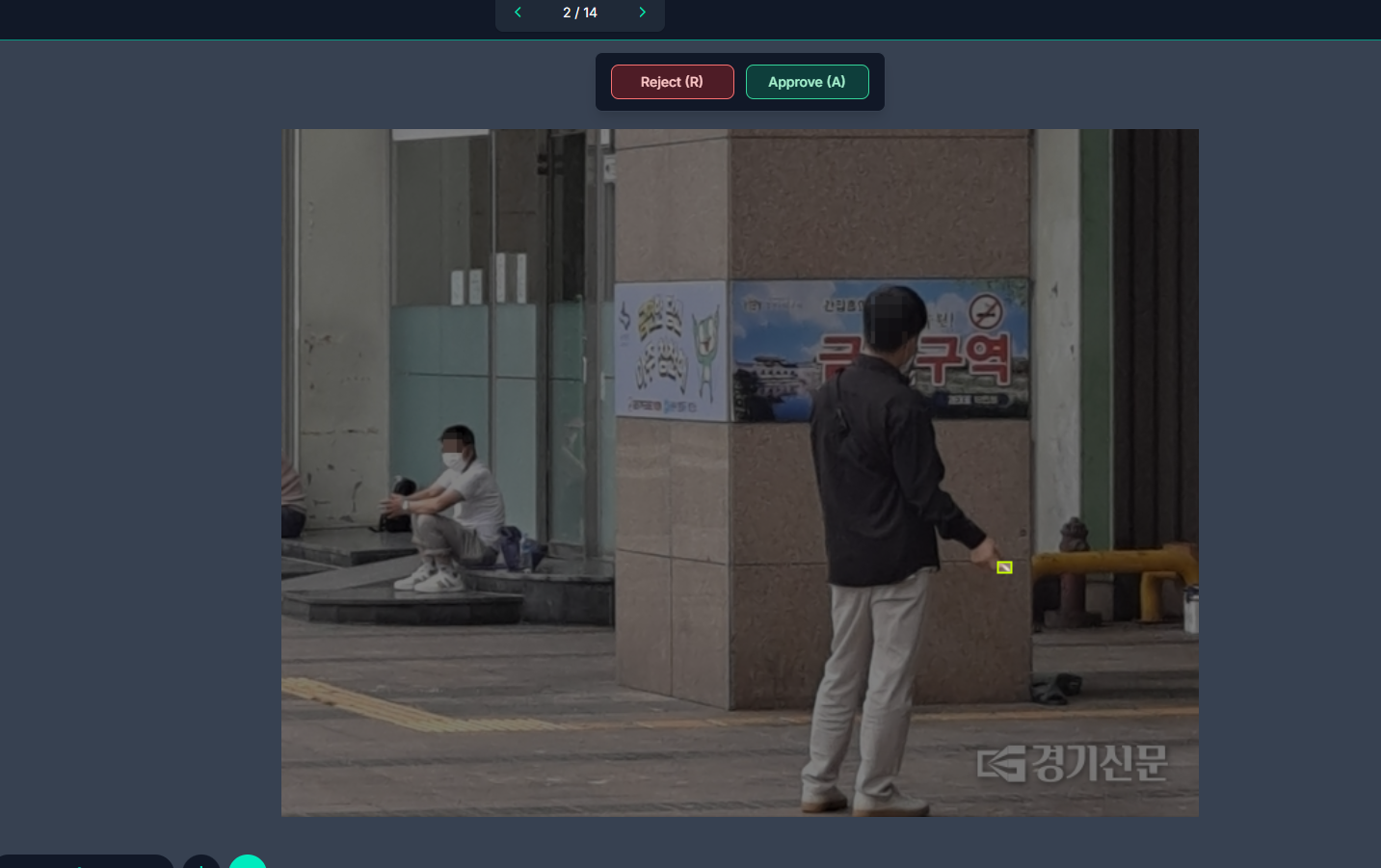
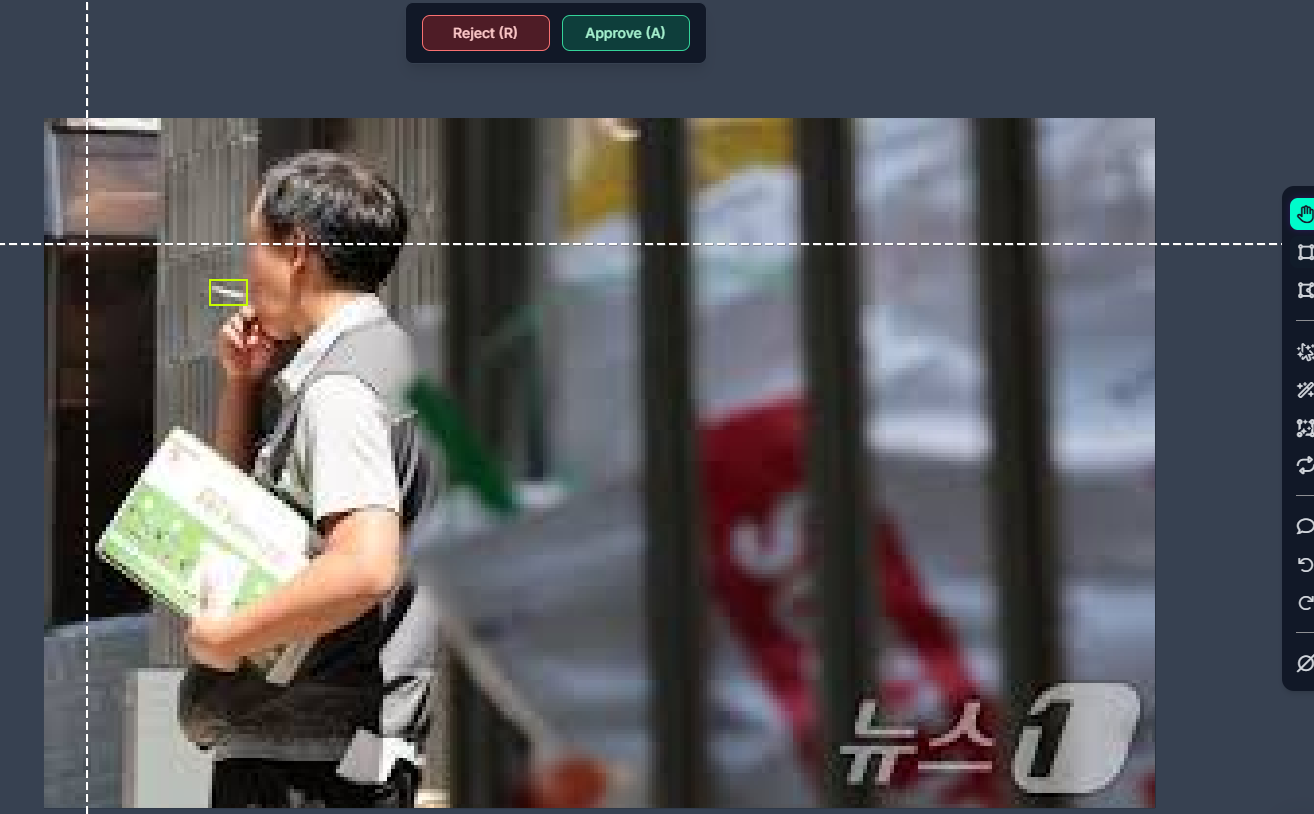
한국길거리 이미지 구글 14개 추가한 데이터셋.
원래 정확도 90 이상인데 내가하니 내려감.
https://universe.roboflow.com/using-ai-to-detect-cigarettes/cigarette-butts-1fukc-p2oxb
바닥에 떨어진 담배꽁초 2천개 이상이라 이거도 해볼 것.
https://www.youtube.com/watch?v=w6nVcFY-kJ0&feature=youtu.be
한거.
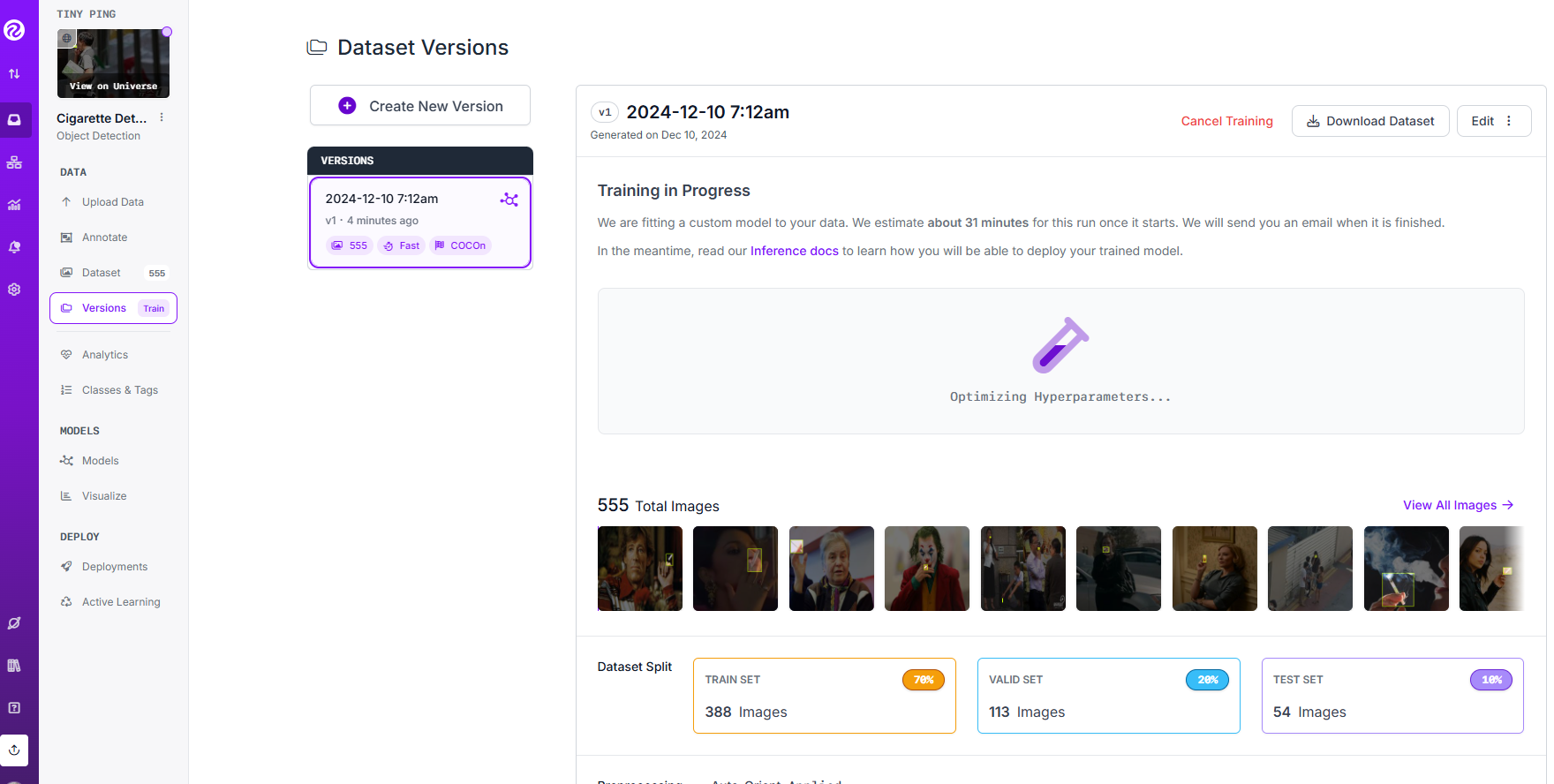
원래 데이터셋으로 로컬에서 cpu로 yolo v11 이용 학습
다음 로보플로우 14개 한국형데이터 추가
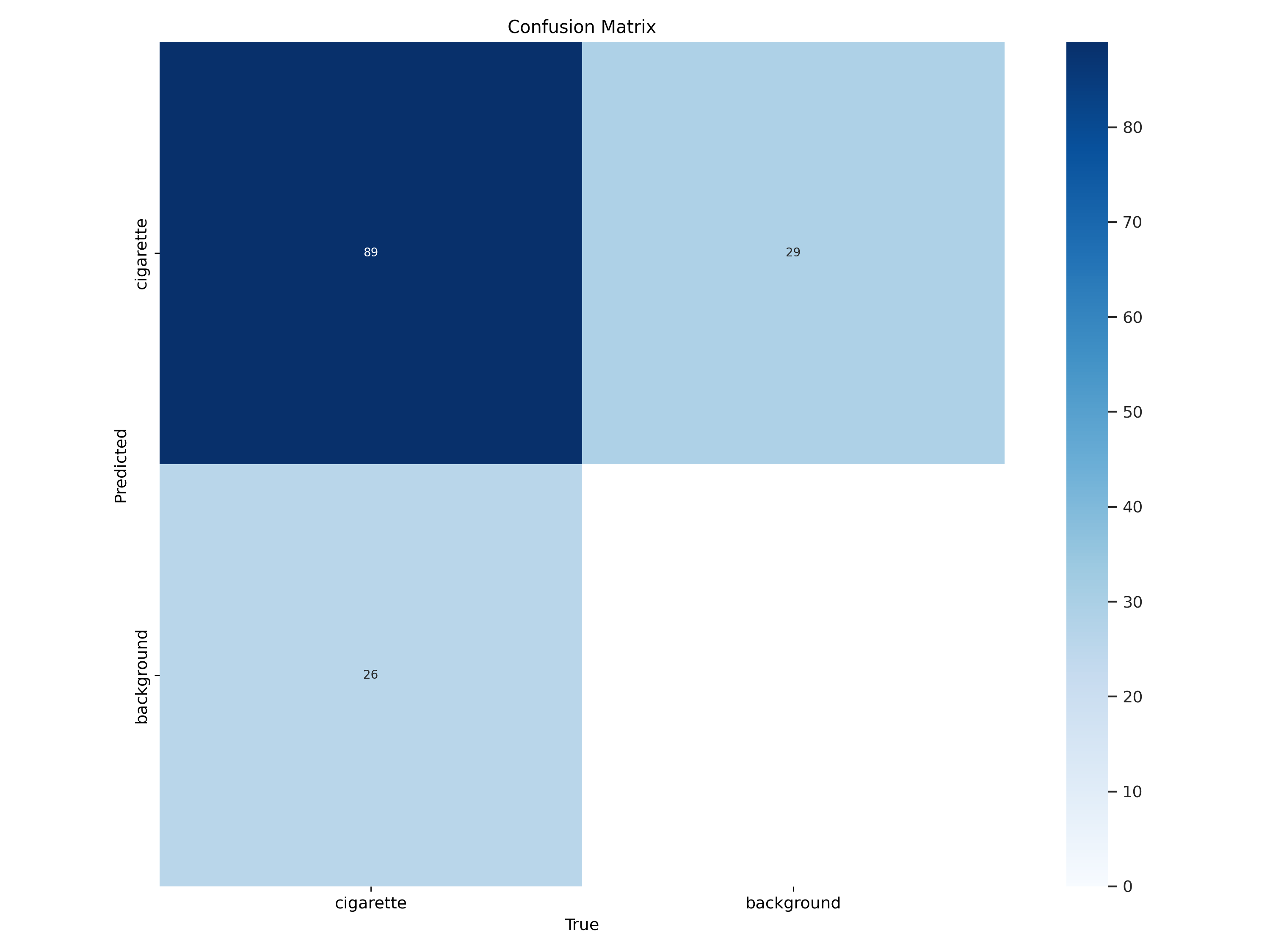
성능 결과가 꽤 향상된 것 같습니다! 훈련 결과에서 얻은 주요 지표들을 보면:
- Precision (B): 0.7337 — 이는 모델이 예측한 긍정적 클래스 중에서 실제로 올바르게 예측한 비율이 약 73.4%임을 의미합니다. 꽤 좋은 수치입니다.
- Recall (B): 0.6521 — 모델이 실제 긍정적 클래스 중에서 약 65.2%를 올바르게 예측했다는 의미로, 이 역시 괜찮은 수준입니다.
- mAP50 (B): 0.6549 — 이는 IoU (Intersection over Union) 기준으로 50% 이상의 정확도를 달성한 평균 AP (Average Precision) 값입니다. 65.5%는 모델의 성능이 상대적으로 좋은 수준임을 보여줍니다.
- mAP50-95 (B): 0.2756 — mAP의 세부적인 성능을 나타내며, IoU 값이 50%에서 95% 사이일 때의 성능을 의미합니다. 이 값은 27.6%로, IoU가 높을수록 정확도가 떨어지는 경향이 있음을 알 수 있습니다. 이는 모델이 좀 더 강한 조건에서 어려움을 겪고 있음을 시사합니다.
전체적으로 보면 정확도와 정밀도는 매우 우수하며, 특히 Precision이 높다는 것은 모델이 예측할 때 실수를 적게 한다는 뜻입니다. Recall과 mAP50-95는 좀 더 개선될 수 있을 것 같습니다.
다음 단계:
- 더 많은 학습 데이터: 모델 성능을 더 향상시키기 위해 더 많은 훈련 데이터를 사용할 수 있습니다.
- 학습률 조정: 더 나은 성능을 위해 학습률을 조정하거나,
lr_scheduler를 통해 학습 중에 학습률을 동적으로 조정할 수 있습니다. - 후처리 개선: NMS (Non-Maximum Suppression) 또는 IoU threshold를 조정하여 성능을 개선할 수 있습니다.
- 멀티스케일 훈련: 다양한 크기의 이미지를 훈련에 사용하면 모델이 다양한 크기의 객체를 잘 인식할 수 있습니다.
현재 mAP50가 65.5% 이상으로 상당히 좋은 편이기 때문에, 추가적인 튜닝과 데이터 확장을 통해 더 높은 성능을 얻을 수 있을 것입니다.
결론적으로 성능은 매우 괜찮고, 추가적인 개선을 위해 튜닝을 계속할 수 있습니다.

금연구역 앞 담배꽁초들


CCTV에서 모델을 돌린다면 담배꽁초를 줄일수있을까

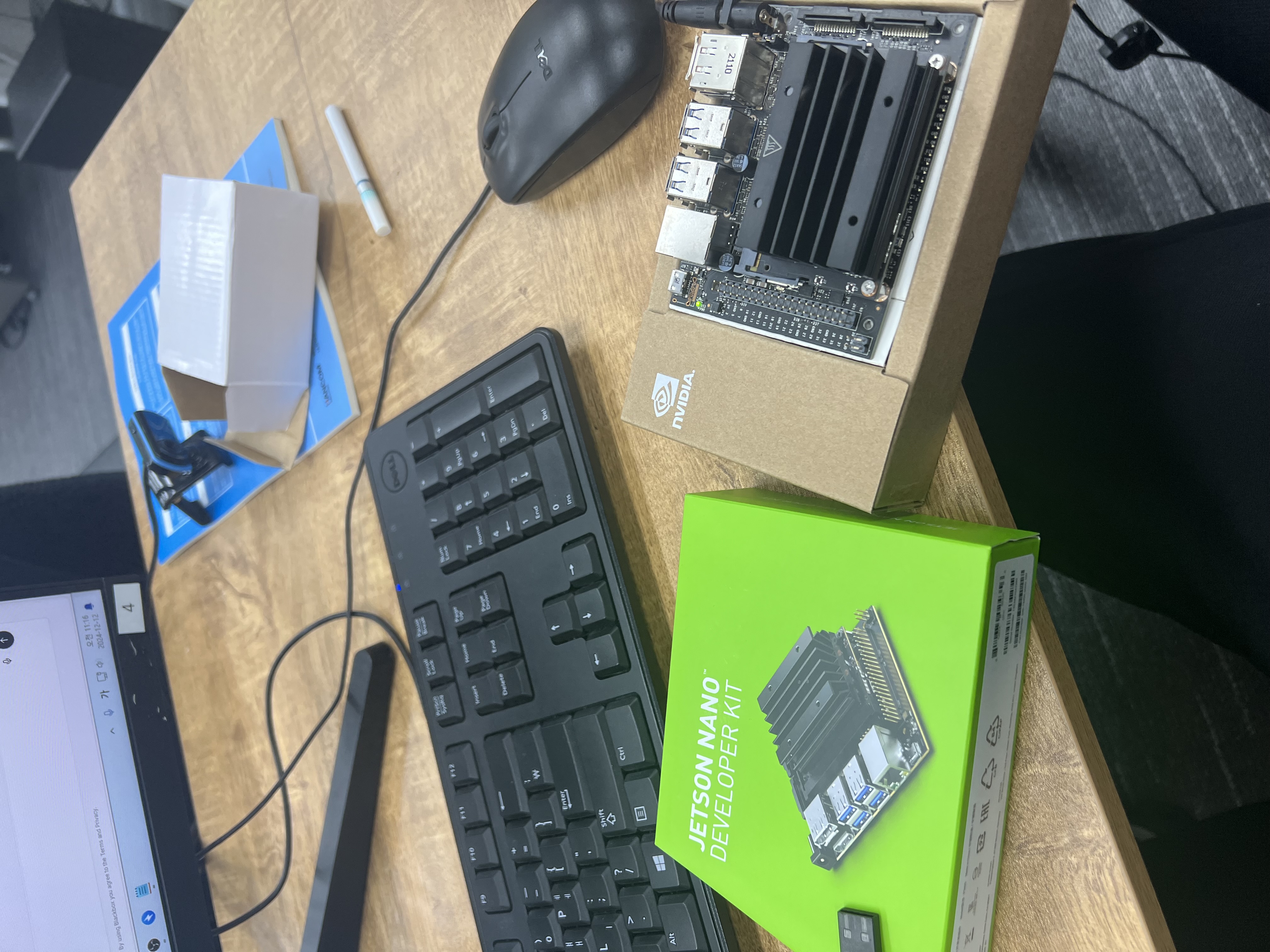
엔비디아 젯슨(예: Jetson Nano, Jetson Xavier) 플랫폼을 사용하여 담배 탐지 프로젝트를 구현하려면, 주로 컴퓨터 비전 기술을 활용합니다. 특히, YOLO(You Only Look Once)와 같은 객체 탐지 알고리즘을 사용하여 담배를 탐지할 수 있습니다. YOLO는 빠르고 정확한 객체 인식 성능을 제공하여 실시간으로 담배를 탐지하는 데 유용합니다.
주요 단계는 다음과 같습니다:
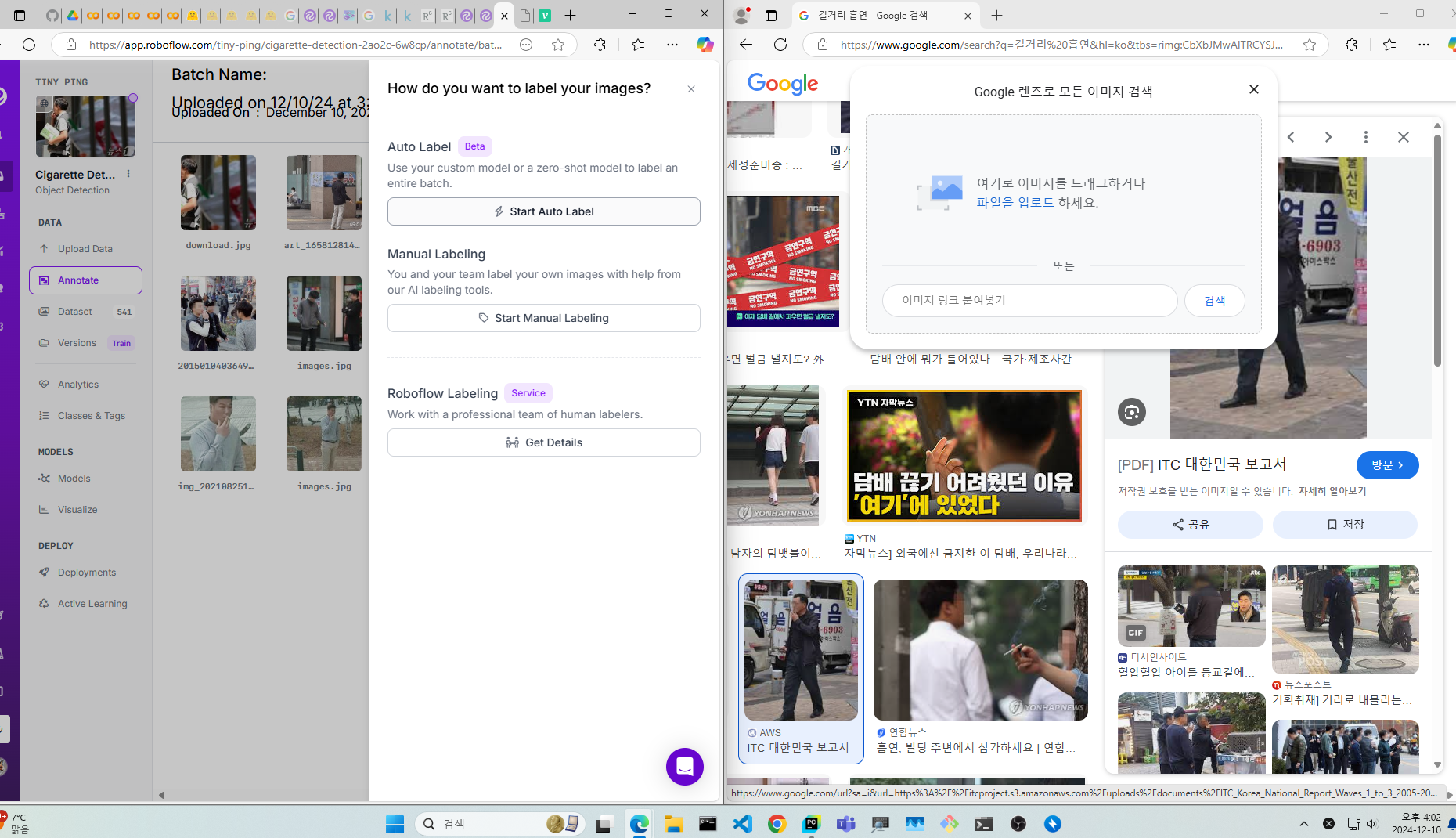
1. 데이터셋 준비
- 담배 이미지 데이터를 모은 후, 객체 탐지용으로 라벨링해야 합니다.
- 담배가 포함된 다양한 이미지들을 수집하고, 각 이미지에서 담배 위치를 바운딩 박스(좌표)로 정의합니다.
- 데이터를 커스터마이즈하여 다양한 환경, 각도, 조명 등을 포함한 다양한 이미지를 수집하는 것이 중요합니다.
2. YOLO 모델 학습
- YOLO 모델을 학습시키기 위해, 준비된 라벨링 데이터를 사용합니다.
- YOLO의 기존 모델을 사용하거나, 담배 객체만을 인식하도록 전이 학습(transfer learning)을 통해 모델을 훈련할 수 있습니다.
- YOLO 모델은 Darknet, PyTorch, TensorFlow 등 다양한 프레임워크에서 구현된 버전들이 있습니다.
3. 모델 최적화
- 엔비디아 젯슨 플랫폼에서는 실시간 객체 인식 성능을 최적화해야 합니다. TensorRT나 ONNX를 사용해 YOLO 모델을 최적화할 수 있습니다.
- 이를 통해 모델을 젯슨의 GPU에서 효율적으로 실행할 수 있습니다.
4. 실시간 담배 탐지
- 최적화된 YOLO 모델을 젯슨 플랫폼에 배포한 후, 실시간 비디오 스트림에서 담배를 탐지할 수 있습니다.
- USB 카메라나 다른 카메라를 연결해 실시간으로 영상을 입력받고, YOLO 모델을 사용해 담배를 탐지하여 결과를 출력합니다.
5. 후속 조치 및 처리
- 탐지된 담배를 바탕으로 경고 시스템을 구현하거나, 다른 후속 작업을 설정할 수 있습니다.
- 예를 들어, 담배를 들고 있는 사람을 실시간으로 추적하거나, 경고 알림을 띄울 수 있습니다.
6. 실제 예시
- YOLO 모델을 통해 '담배'라는 클래스를 학습하고, 이를 통해 담배를 들고 있는 사람을 실시간으로 탐지할 수 있습니다.
- 모델 학습 시 '담배'와 같은 객체를 별도로 정의하여 탐지하도록 구성합니다.
결론:
엔비디아 젯슨을 활용하여 YOLO로 실시간 담배 탐지 시스템을 구현하려면, 적절한 데이터셋 수집과 모델 학습, 최적화 과정을 통해 성능을 극대화할 수 있습니다. 이 프로젝트는 담배를 감지하고 경고를 보내는 시스템에 적합하며, YOLO를 사용한 객체 탐지의 장점을 실현할 수 있습니다.
길거리 담배꽁초 없는 환경을 위한 엔비디아 젯슨 미니 봇 프로젝트
이 프로젝트의 목표는 길거리에서 담배꽁초를 없애고, 담배를 피우지 않도록 유도하는 것입니다. 엔비디아 젯슨 미니 봇을 활용하여, 다양한 기술을 결합하여 길거리에서 담배를 피우는 행위와 담배를 버리는 행동을 실시간으로 탐지하고 대응할 수 있는 시스템을 개발합니다.
1. 목표: 길거리에서 담배를 피지 않게 만들기
- 휴대용 재떨이: 길거리에서 담배를 피우는 사람들에게 휴대용 재떨이를 제공하거나, 재떨이를 찾을 수 있는 위치를 안내하는 시스템을 통해 담배 꽁초를 버리는 문제를 해결하고, 환경을 보호할 수 있습니다.
- 열화상카메라와 연기 탐지: 열화상 카메라와 연기 탐지 기술을 활용하여, 담배를 피울 때 발생하는 열과 연기를 실시간으로 탐지합니다. 이 방법은 특히 야간이나 어두운 환경에서 유용할 수 있습니다.
2. 열화상 카메라와 연기 탐지
- 열화상 카메라: 열화상 카메라는 담배를 피울 때 발생하는 미세한 열을 탐지하여 담배를 피우고 있는 사람을 빠르게 인식할 수 있습니다. 이를 통해, 실시간으로 불을 피우는 행위를 감지할 수 있습니다.
- 연기 탐지: 연기 센서를 통해 담배 연기를 탐지하고, 이를 바탕으로 담배를 피우는 행위나 불법적인 흡연을 실시간으로 확인할 수 있습니다. 연기 탐지는 담배를 피우는 사람을 더욱 정확하게 식별할 수 있습니다.
3. 사람 동작 탐지: 사무라이 모델
- 사무라이 모델: 사람의 동작을 인식하는 모델을 이용하여, 담배를 버리는 행동을 탐지할 수 있습니다. 이 모델은 길거리에서 담배를 버리는 사람의 동작을 분석하고, 이를 기반으로 실시간 알림을 보낼 수 있습니다. 또한, 범죄 예방에도 활용될 수 있어, 사람들이 길거리에 쓰레기를 버리거나 부적절한 행동을 할 때 이를 감지하고 대응할 수 있습니다.
4. YOLO 모델의 장단점
- 장점: YOLO(You Only Look Once) 모델은 객체 탐지에서 빠르고 효율적인 성능을 제공합니다. 실시간으로 담배를 피우거나 담배꽁초를 버리는 행동을 탐지하는 데 유용하며, 특히 엔비디아 젯슨 미니 봇처럼 제한된 자원에서도 빠르게 처리할 수 있는 장점이 있습니다.
- 단점: YOLO는 속도가 빠르지만, 정확도 측면에서는 일부 오탐지나 누락이 발생할 수 있습니다. 예를 들어, 비슷한 색상이나 형태를 가진 다른 물체와 혼동할 수 있어 정확한 탐지가 어려울 수 있습니다. 따라서, 정확도를 높이기 위해 추가적인 최적화나 후처리 과정이 필요할 수 있습니다.
결론
길거리에서 담배를 피우지 않게 하고, 담배꽁초를 없애기 위한 엔비디아 젯슨 미니 봇 프로젝트는 여러 가지 기술을 결합한 혁신적인 접근 방식입니다. 휴대용 재떨이 제공, 열화상 카메라, 연기 탐지, 사람 동작 분석 등을 통해 담배를 피우는 사람을 실시간으로 탐지하고, 이를 예방할 수 있는 효과적인 방법을 제시할 수 있습니다. YOLO 모델을 활용하면 빠른 속도로 객체를 탐지할 수 있지만, 정확도를 개선하는 추가 작업이 필요할 수 있습니다. 이 프로젝트는 환경 보호와 범죄 예방을 동시에 해결할 수 있는 중요한 기술적 해결책이 될 것입니다.
욜로 나노모델//
https://github.com/yangchris11/samurai
사무라이모델 깃허브
https://www.youtube.com/watch?v=9ECnFEY9Sg0&t=34s
내가한 테스트 욜로

담배꽁초 수거로봇

로봇에게 일자리를 빼앗긴 환경미화원
