
1. 문제 상황
쇼핑몰 자동화 시스템 프로젝트에서 Pinky 로봇 3대를 Nav2로 자율주행 제어하던 중, 특정 구간에서 반복적으로 로봇이 목표 지점에 도달하지 못하는 문제를 만났다.
증상은 크게 세 가지였다.
- 목표 지점 근처에서 멈추거나 제자리 회전을 반복
- 좁은 통로 진입 자체를 포기하고 Navigation Failed 반환
- goal_tolerance 범위 안에 들어왔다 해도 실제 위치가 부정확한 경우
실제로 문제가 발생한 구간은 p3 → p4, p4 → p6, p6 → p8 로, 쇼핑몰 좁은 통로 구간이다. 로봇이 목표 지점 1m 전에서 멈추거나, 진입조차 시도하지 않았다.
원인 분석
Costmap inflation 문제
Nav2는 장애물 주변에 inflation layer를 적용해 로봇이 안전하게 우회할 수 있도록 한다. 문제는 좁은 통로에서 양쪽 벽의 inflation 영역이 겹쳐버리면, 해당 공간 자체가 '진입 불가'로 판단된다는 것이다. inflation_radius를 낮추면 통로를 지나갈 수 있지만, 장애물에 너무 가까이 붙어 충돌 위험이 높아진다.
AMCL 위치 추정 오차 누적
긴 경로를 이동하는 동안 AMCL 파티클 필터의 오차가 누적되면, 로봇이 자신의 위치를 잘못 인식해 goal_tolerance 기준 자체가 흔들린다.
2. 해결 전략: Nav2 + PID 하이브리드
여러 방법을 검토했다.
- Nav2 파라미터 튜닝만으로 해결: inflation 낮추면 충돌 위험, goal_tolerance 높이면 정밀도 하락
- 전체 경로를 PID로 제어: 글로벌 장애물 회피 불가, 실용적이지 않음
- Nav2 + PID 하이브리드: 각각의 장점만 취함
핵심 아이디어는 단순하다. 원거리는 Nav2가 잘하는 일(경로 계획, 장애물 회피)을 맡기고, 목표 지점 근처의 짧은 구간에서만 Nav2를 취소하고 PID 제어로 전환해 정밀하게 도달하는 것이다.
3. 구현 상세
3-1. 구간별 PID Zone 설정
모든 구간에 동일한 PID Zone 거리를 적용하지 않았다. 구간마다 통로 너비, 장애물 분포, 필요 정밀도가 다르기 때문이다.
| 출발 POI | 도착 POI | PID 전환 거리 |
|---|---|---|
| p3 | p4 | 1.03m |
| p4 | p6 | 0.52m |
| p6 | p8 | 0.70m |
# 구간별 PID 전환 거리 설정
# (출발 POI, 도착 POI) → PID 전환 거리(m)
PID_EDGES = {
('p3', 'p4'): 1.03,
('p4', 'p6'): 0.52,
('p6', 'p8'): 0.70,
}넓은 구간은 radius=0으로 설정해 Nav2만 사용한다.
3-2. 모드 전환 로직
100ms 주기로 현재 위치와 목표 지점 사이의 거리를 체크한다. 거리가 pid_zone_radius 이하로 진입하는 순간 Nav2를 취소하고 PID 모드로 전환한다.
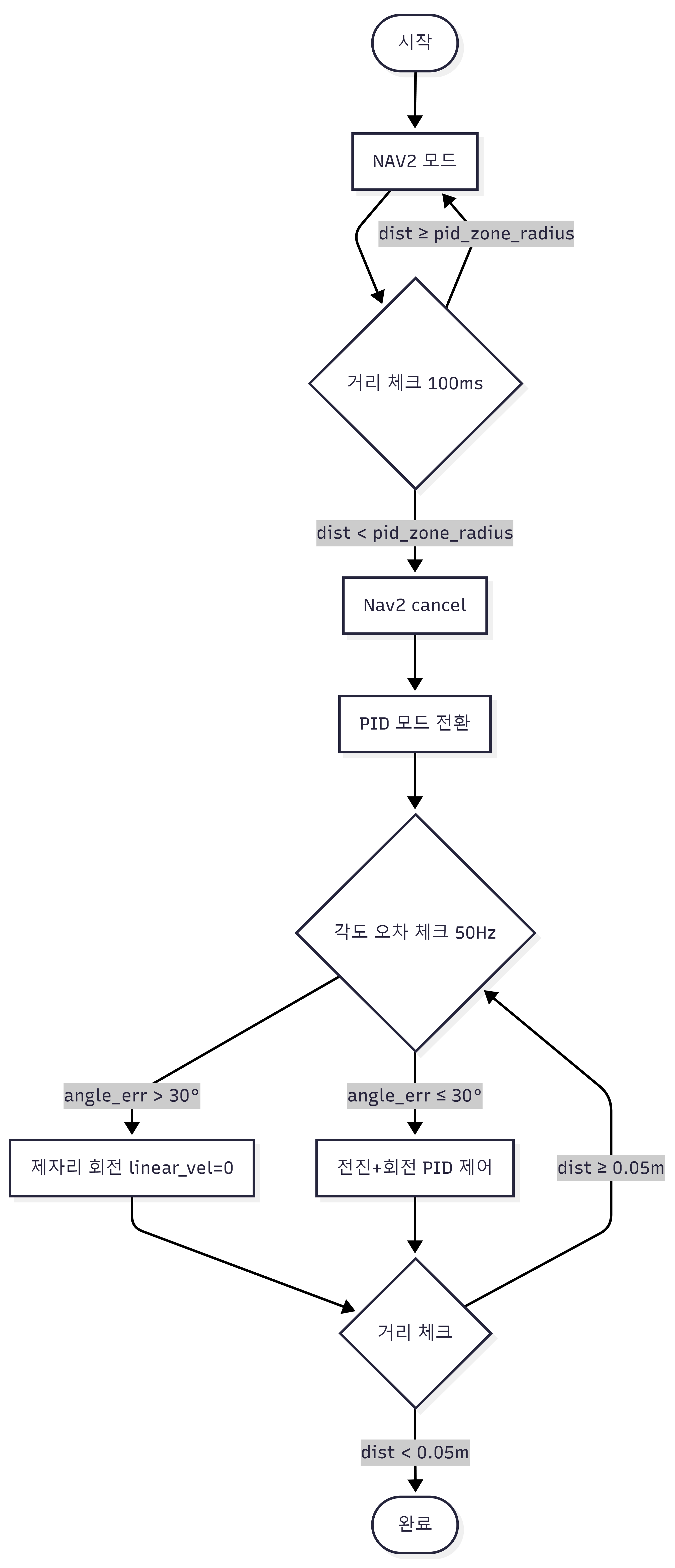
3-3. PID 제어기
선속도(전진)와 각속도(회전)를 별도의 PID로 제어한다.
# Linear PID (전진 제어)
Kp=0.5, Ki=0.0, Kd=0.1
max_vel = 0.15 m/s
# Angular PID (회전 제어)
Kp=1.5, Ki=0.0, Kd=0.2
max_vel = 1.0 rad/sPID 게인은 처음에 잘 설계된 초기값에서 시작해, 실제 주행 테스트에서 오버슈트가 발생하지 않도록 max_vel만 낮추는 방향으로 조정했다.
한 가지 포인트: 각도 오차가 30° 이상이면 전진 속도를 0으로 설정하고 제자리 회전을 먼저 수행한다. 방향이 크게 틀어진 상태에서 전진하면 목표에서 더 멀어지는 경우가 생기기 때문이다. (요건 April tag로 yaw 재정렬하는 방식으로 각도오차를 줄이도록 개선할 예정이다)
3-4. 핵심 코드
_zone_check(): Nav2 → PID 전환 판단
def _zone_check(self):
dx = self.goal_x - self.current_x
dy = self.goal_y - self.current_y
dist = math.sqrt(dx**2 + dy**2)
key = (self.start_poi, self.goal_poi)
radius = PID_EDGES.get(key, 0.0)
if radius > 0 and dist < radius:
self._switch_to_pid()_pid_loop(): PID 제어 루프 (50Hz)
def _pid_loop(self):
dx = self.goal_x - self.current_x
dy = self.goal_y - self.current_y
dist = math.sqrt(dx**2 + dy**2)
if dist < 0.05:
self._complete()
return
angle_to_goal = math.atan2(dy, dx)
angle_err = angle_to_goal - self.current_yaw
# 각도 정규화 (-pi ~ pi)
angle_err = math.atan2(math.sin(angle_err), math.cos(angle_err))
angular_vel = self.angular_pid.compute(angle_err)
# 각도 오차 30도 이상이면 전진 정지
if abs(angle_err) > math.radians(30):
linear_vel = 0.0
else:
linear_vel = self.linear_pid.compute(dist)
self._publish_cmd(linear_vel, angular_vel)3-5. 예외 처리
- Nav2 Navigation Failed 시 1회 자동 재시도
goal_generation번호로 이전 콜백 무시 (race condition 방지)- TF(
map → base_footprint) 조회 실패 시 해당 주기 스킵
4. 결과
Before vs After
| 구간 | Nav2만 사용 | Nav2 + PID |
|---|---|---|
| p4 → p6 | 목표 0.8m 전에서 정지 | 목표 도달 (오차 < 5cm) |
| p6 → p8 | 좁은 구간 진입 포기 | 정상 도달 |
p4 → p6 구간은 Nav2만 사용했을 때 항상 0.8m 전에서 멈췄는데, PID 전환 후에는 오차 5cm 이내로 도달하게 됐다. p6 → p8은 아예 진입을 포기하던 구간이었는데 정상 도달이 가능해졌다.
한계점 및 추후 개선 방향
- PID Zone에서 동적 장애물 회피 불가 → 해당 구간은 충분히 짧게 설정해 리스크를 최소화
- PID 게인 수동 튜닝 필요 → 로봇/환경이 바뀌면 재조정 필요
5. 마무리
Nav2는 강력한 프레임워크지만, 좁은 공간에서의 정밀 도달에는 구조적 한계가 있다. inflation을 낮추는 것만으로는 충돌 안전성을 희생해야 하고, goal_tolerance를 높이면 정밀도가 떨어진다.
이번에 구현한 Nav2 + PID 하이브리드 방식은 두 가지를 모두 포기하지 않는 실용적인 해법이었다. '원거리는 Nav2, 근거리는 PID'라는 단순한 원칙이 생각보다 잘 동작했다.
ROS2로 실제 로봇을 제어하면서 교과서적인 파라미터 튜닝만으로 해결되지 않는 문제들이 있다는 걸 느꼈다. 그럴 때는 시스템의 한계를 인정하고, 다른 제어 방식을 조합하는 접근이 유효한 것 같다.
