Robotics
1.URDF 니 먼데!

로봇과 실시간 움직임을 웹상에서 구현하기 위해 개발자 인터페이스를 구축하고 있습니다. 기존의 gltf와 같은 단순히 외형을 로드하는 모델과는 근본적으로 접근 방식이 다릅니다... 그래서 필수적인 규격인 URDF에 대해 아주 간단히 살펴보았습니다.
2025년 11월 19일
2.월드 포지션이 없으면 어떻게 월드에 넣어요?

STL을 솔리드웍스에서 내보내면, 블렌더 등에서 모델 위치가 어긋나는 문제는 CAD와 DCC의 설계 철학 차이 때문이다. 사용자 정의 좌표계(CCS)를 설정하고 내보내기 옵션에서 지정하면 문제를 해결할 수 있다.
2025년 11월 29일
3.Windows 11 + WSL2 + ROS2 + UR 시뮬레이터 + Websocket 설치 및 실행 가이드
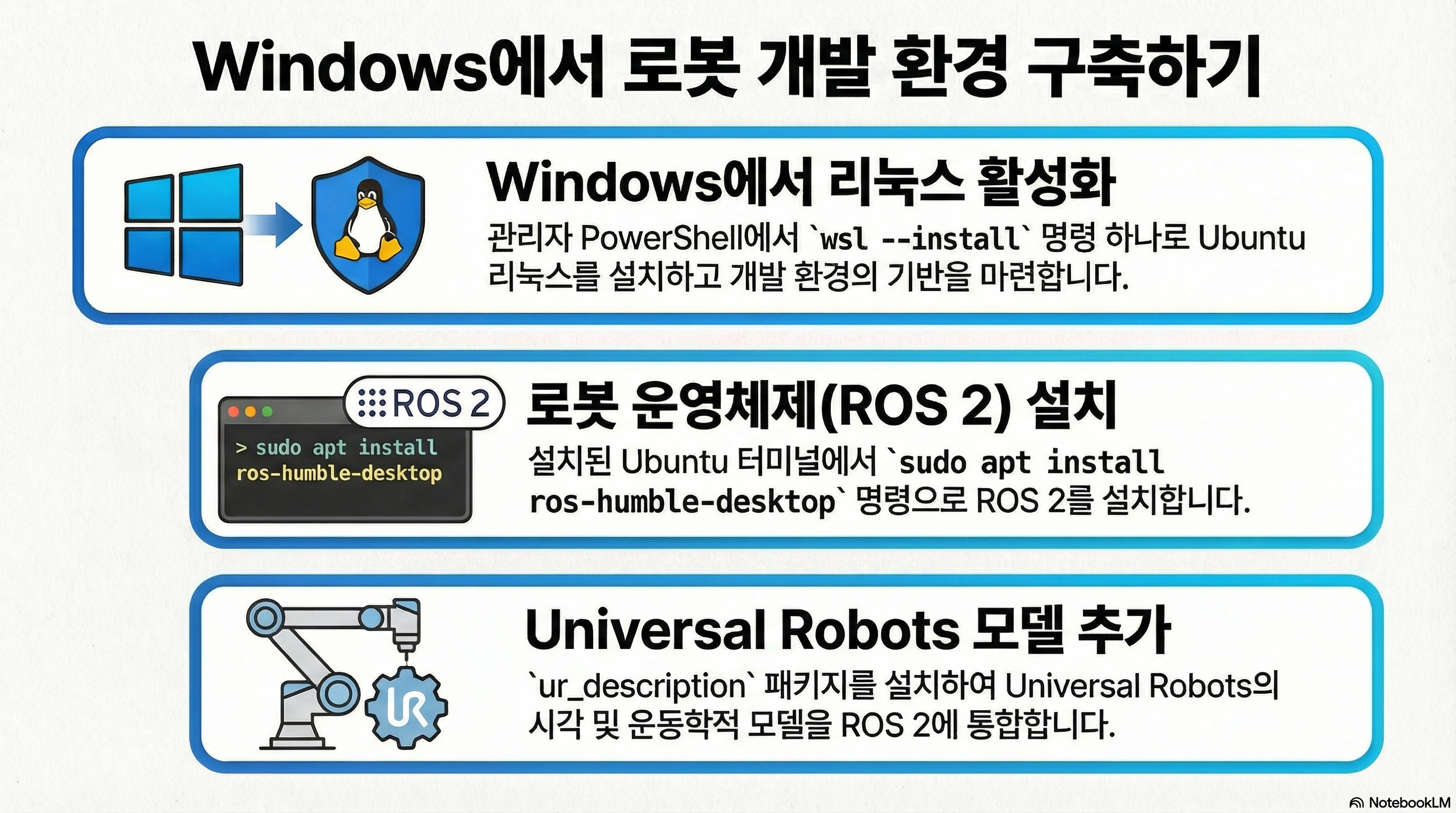
WSL2 + Ubuntu 22.04 + ROS 2 Humble + URSim + rosbridge
2025년 12월 15일