Robotics
1.[Robotics] 1. ROS2 개념 정리

0. 전체 내용 요약과 키워드 이 문서는 ROS2를 로봇 시스템을 구성하는 분산 미들웨어로 정리한다. 핵심은 로봇 기능을 하나의 큰 프로그램이 아니라 여러 node로 나누고, node 사이를 topic, service, action으로 연결하는 방식이다. Topic은 지속적으로 흐르는 데이터, service는 요청과 응답, action은 시간이 걸리는 목...
2.[Robotics] 2. Robot Motion Tool 정리
0. 전체 내용 요약과 키워드 이 문서는 로봇의 구조를 정의하고, 그 구조를 실제 움직임으로 연결하는 과정을 정리한다. URDF/Xacro는 link, joint, visual, collision, inertial 정보를 통해 로봇의 몸과 운동학적 tree를 만든다. RViz는 이 모델과 TF, joint state, planning 결과를 시각화하고, ...
3.[Robotics] 3. Isaac Sim 이론 정리
이 문서는 Isaac Sim을 로봇, 센서, 물리, 작업 시나리오를 가상 환경에서 검증하는 시뮬레이션 도구로 정리한다. Isaac Sim은 Omniverse와 USD 기반으로 로봇 모델, gripper, 물체, 물리 속성, camera/LiDAR/IMU/contact
4.[Robotics] 4. 고전 CV & Image Processing 이론 정리
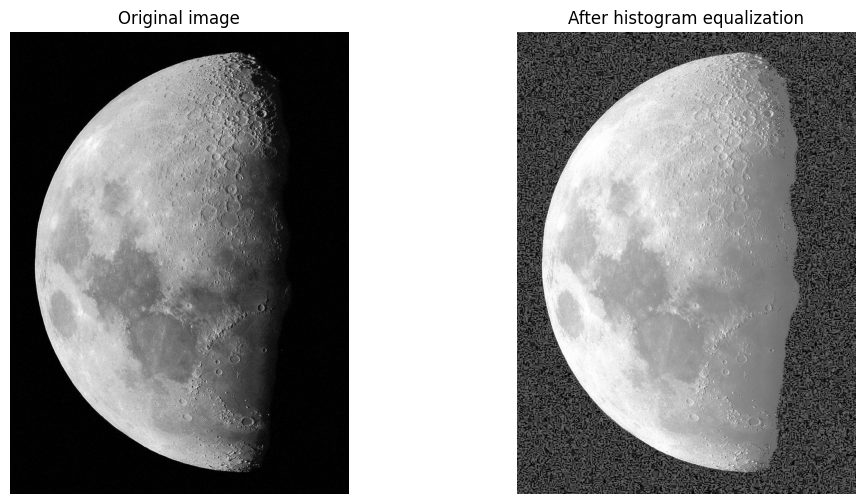
이 문서는 딥러닝 이전의 컴퓨터비전 기초를 이미지의 수치적 표현과 규칙 기반 처리 관점에서 정리한다. 이미지는 픽셀 배열이며, grayscale/RGB, histogram, contrast, noise, edge, region 같은 신호 특성을 이해해야 이후 detec
5.[Robotics] 5. CNN & Object Detection 이론 정리
이 문서는 컴퓨터비전이 사람이 설계한 feature에서 데이터로 학습한 feature로 확장되는 흐름을 정리한다. CNN은 convolution filter를 학습해 이미지의 지역 패턴을 추출하고, augmentation은 제한된 데이터에서 다양한 조건을 경험하게 해
6.[Robotics] 6. Robot CV Connection 정리
이 문서는 ROS2, 로봇 모델링, MoveIt, 컴퓨터비전이 하나의 로봇 작업 파이프라인으로 연결되는 과정을 정리한다. CV는 이미지에서 물체, 영역, 특징을 찾지만, 로봇이 행동하려면 그 결과가 depth, camera intrinsic, hand-eye calib