https://ocw.mit.edu/courses/18-06-linear-algebra-spring-2010/video_galleries/video-lectures/
이번 강의에서는 다음과 같은 내용을 배운다.
- Linear Transforamtion T
- Construct matrix A that represents T ( with coordinates c and basis v,w )
우선 Linear Transformation T 의 규칙은 다음과 같다.
T(v+w)=T(v)+T(w)
T(cv)=cT(v)
T() 를 함수처럼 생각하면 편하다.
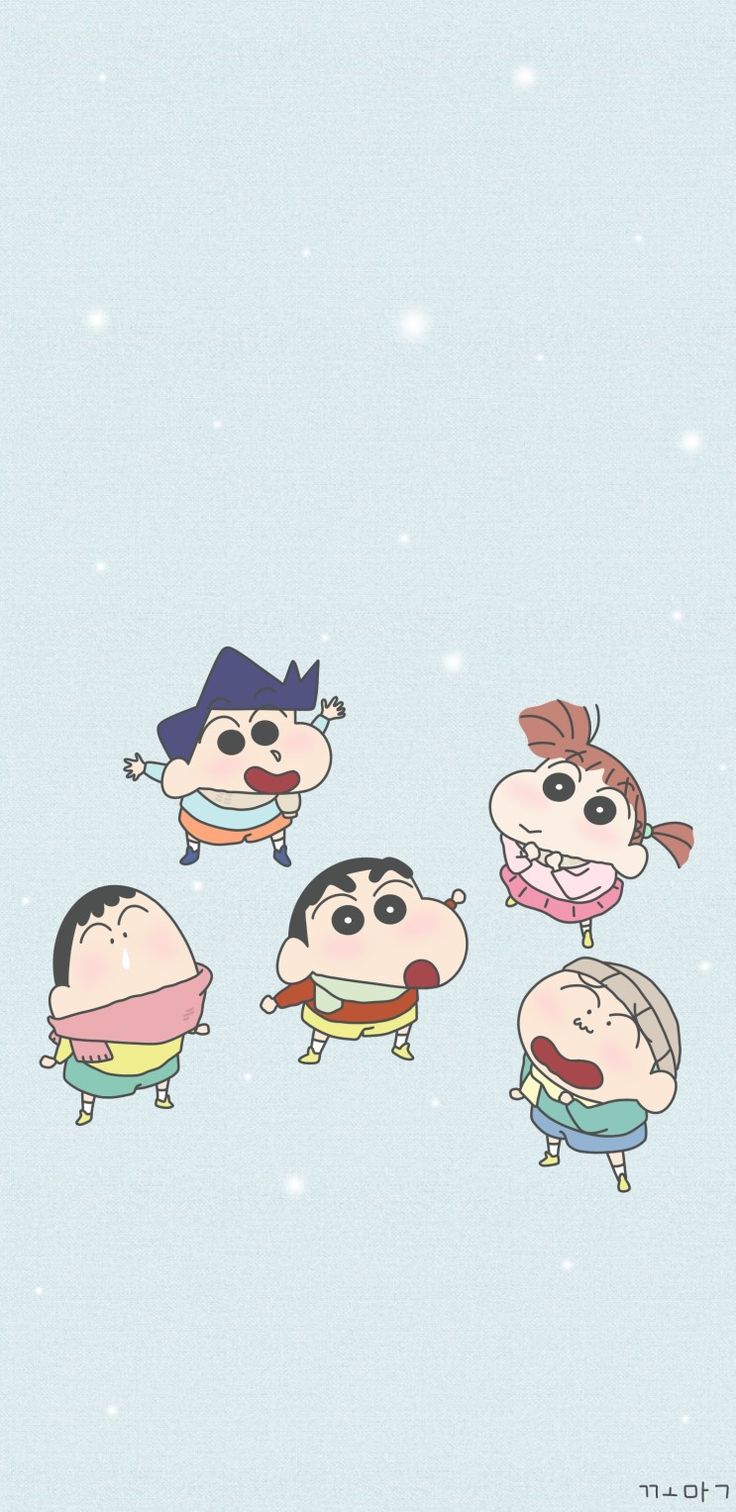
예시로 Projection 을 보자.
T:R2→R2
위 그림을 봤을 때 Projection은 Linear Transformation 에 해당한다는 것을 알 수가 있다.
왜냐하면 다음과 같은 규칙을 만족하기 때문이다.
- T(v+w)=T(v)+T(w)
- T(cv)=cT(v)
그렇다면 Linear Transformation 이 아닌 예시는 어떤 게 있을까? 다음을 보자.
Shift whole plane by v0
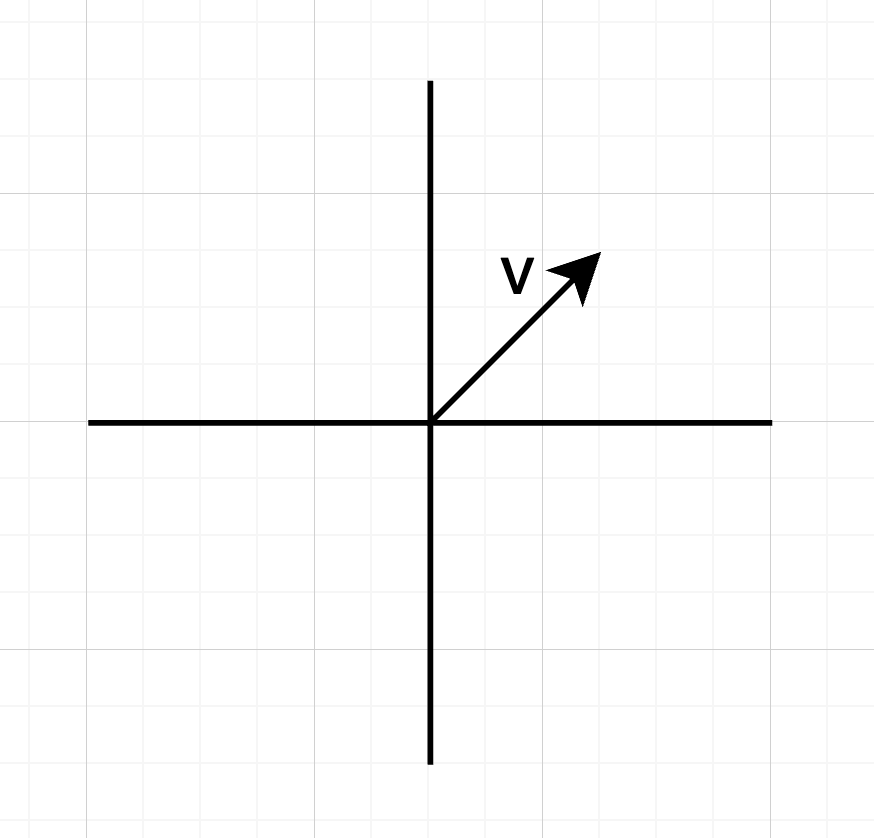
위와 같은 벡터에 v0를 더하면 아래와 같이 나온다.
이를 봤을 때, T(2v)=2T(v) 라는 것을 알 수가 있다.
따라서 이는 linear transformation 이 아니다.
또 다른 예시로, 다음과 같은 Transformation 을 보자.
T(v)=∣∣v∣∣2,T:R3→R1
이 역시 마찬가지로 T(−2v)=−2T(v) 인 것을 알 수가 있다.
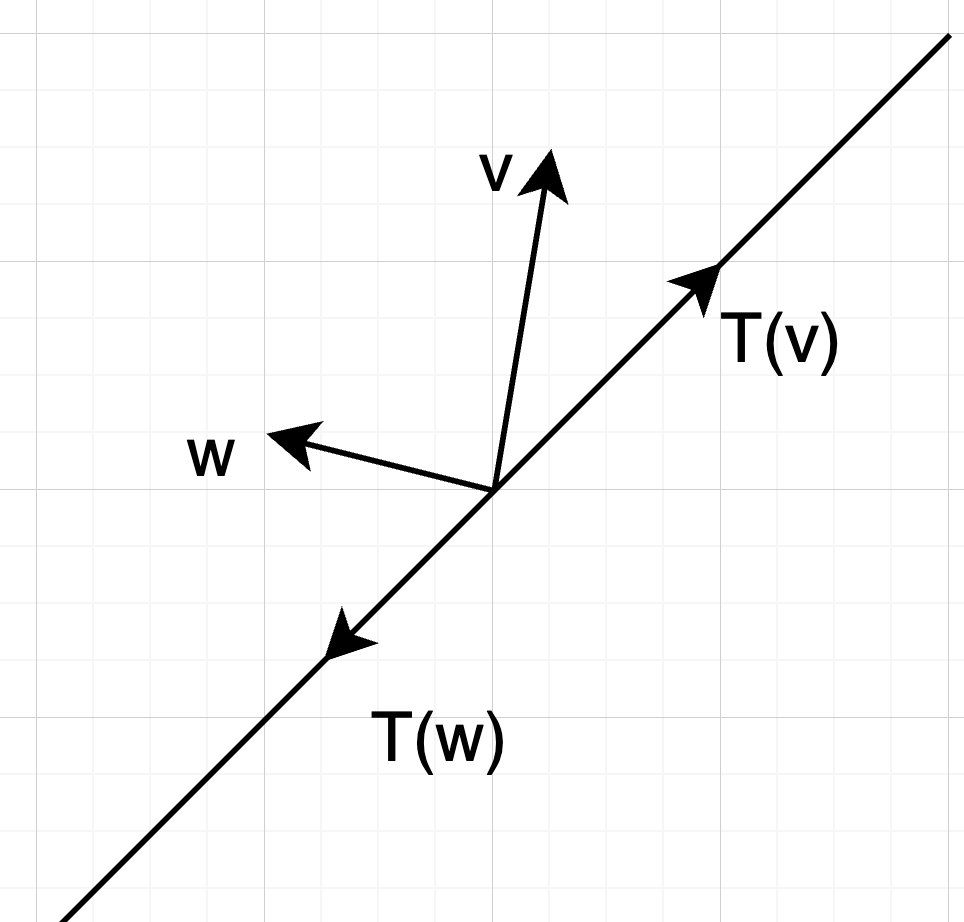
그럼 계속해서 Linear Transformation 을 보자.
ex. < Rotation by 45 degrees. >
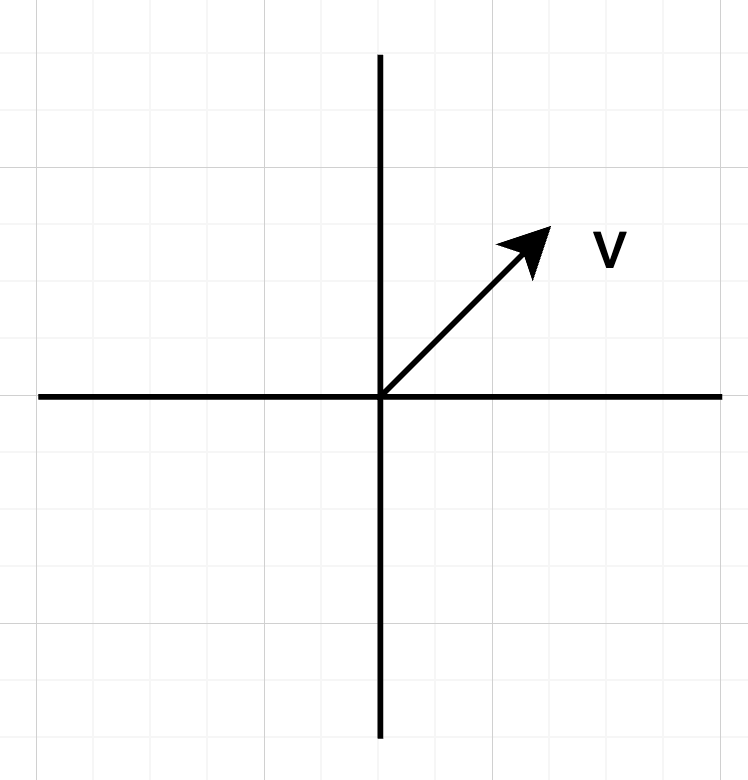
위 벡터에서 45도를 회전시킨다.
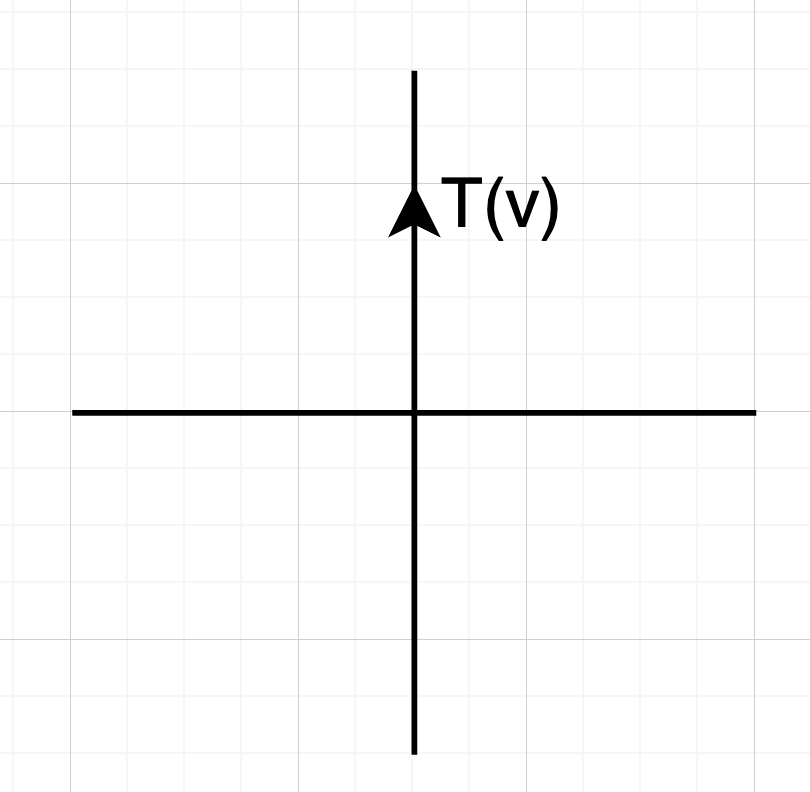
위와 같이 45도가 회전된 벡터가 나왔다.
그리고 T(2v)=2T(v) 등도 만족하는 것을 알 수가 있다.
다음으로 행렬에 대해서도 linear transformation 을 보자.
행렬에 대해서 다음 규칙은 만족된다.
- A(v+w)=Av+Aw
- A(cv)=cA(v)
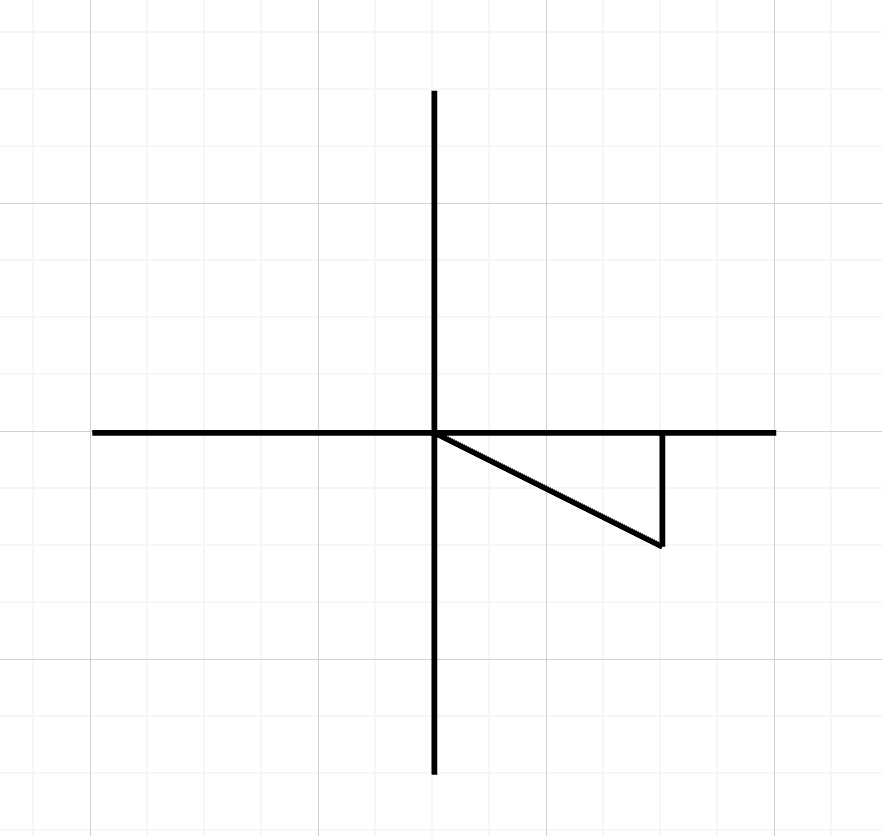
예시로 다음과 같은 행렬을 보자. A=[100−1]
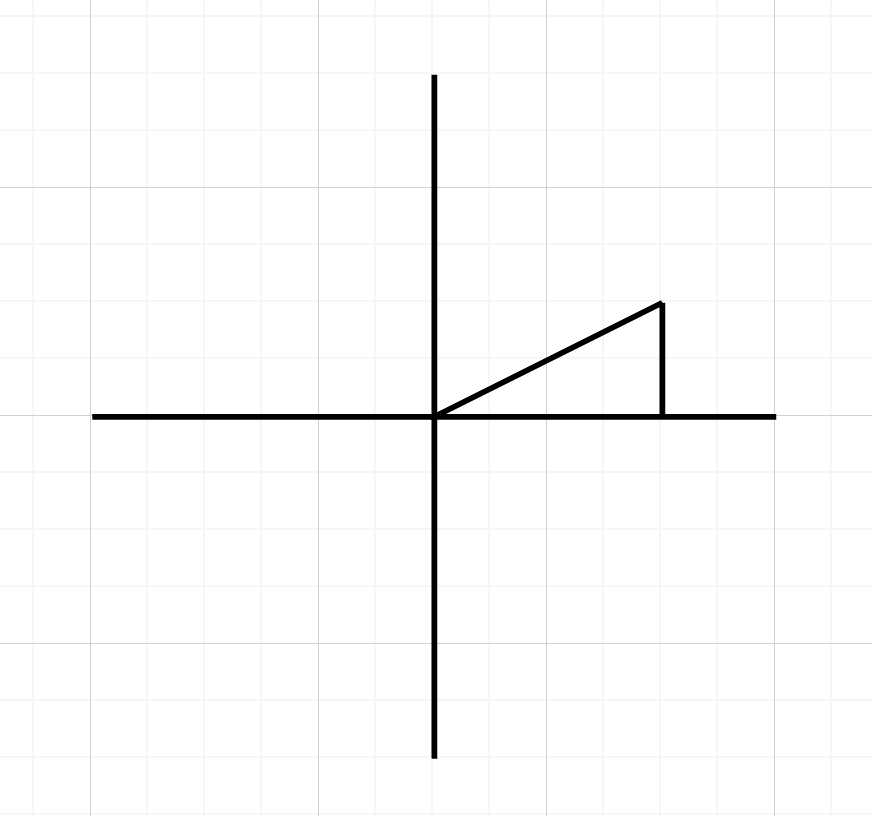
A=[100−1] 를 적용하기 전에 위와 같은 모양이었다면, 이를 적용하면, x는 그대로, y는 반전된 다음과 같은 모양이 나올 것이다.
그러면 A 의 차원은 어떻게 구할 수 있을까? 다음을 보자.
T:inputR3→outputR2
이 경우 Av 의 차원은 R2 이고 v 의 차원은 R3 이므로, A의 차원은 3×2 가 나올 것이다.
다음으로 T(v) 를 구하기 위한 요소들을 알아보자.
Information needed to know T(v) for all inputs v’s.
T(v1),T(v2),...,T(vn) for any basis v1,v2,...,vn
Every v=c1v1+c2v2+...+cnvn
T(v)=c1T(v1)+...+cnT(vn)
coordinates c's come from a basis. (v=c1v1+c2v2+...+cnvn)
ex. v=⎣⎢⎡324⎦⎥⎤=3⎣⎢⎡100⎦⎥⎤+2⎣⎢⎡010⎦⎥⎤+4⎣⎢⎡001⎦⎥⎤
이제 linear transformation 을 나타내는 행렬 A 를 구해보자.
Construct matrix A that represents T (T:Rn→Rm)
- choose basis v1,...,vn for inputs in Rn
- choose basis w1,...,wn for outputs in Rm
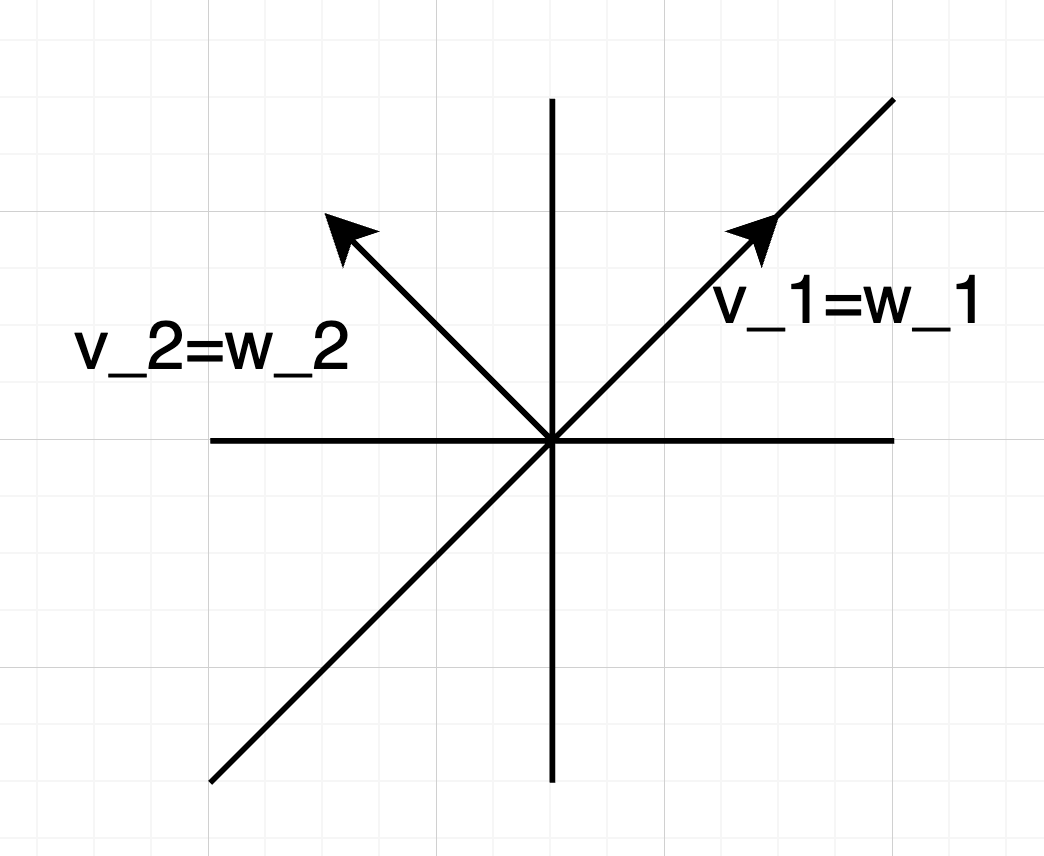
ex. projection
v=c1v1+c2v2
위 v 를 아래와 같이 나오도록 linear transformation 을 적용해보자.
이 경우 linear transformation T 는 다음과 같다.
T(v)=c1v1 (c2=0)=Av
이를 만족하는 A 는 무엇일까?
A[1000]input coords.[c1c2]=output coords.[c10]
위 예시와 같은 행렬 A를 찾는 규칙은 다음과 같다.
Rule to find matrix A (given v1,...,vn , w1,...,wm)
1st. column of A:write T(v1)=a11w1+...+am1wm
2nd. column of A:write T(v2)=a12w1+...+am2wm
A(input coordinates)=(ouput coordinates)
또 다른 예시로 미분을 알아보자. 미분 역시 linear Transformation 에 해당한다.
T=dxd:linear transformation
- input : c1+c2x+c3x2 , basis : 1,x,x2
- output : c2+2c3x , basis : 1,x
A⎣⎢⎡c1c2c3⎦⎥⎤=[c22c3]
∴A=[001002]