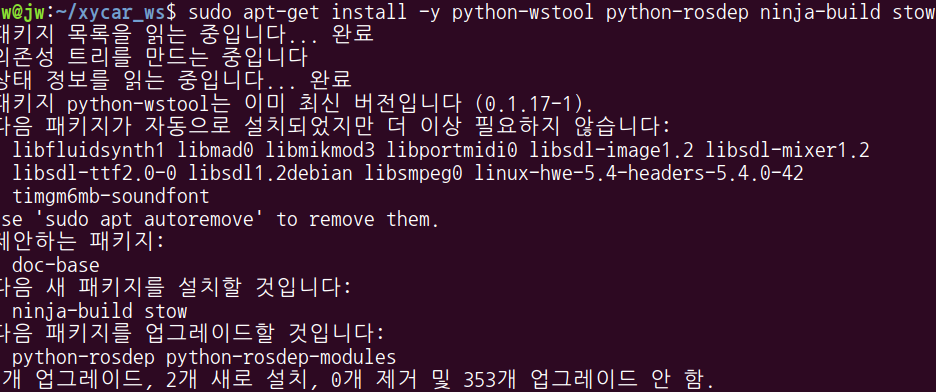
패키지 다운
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build stow
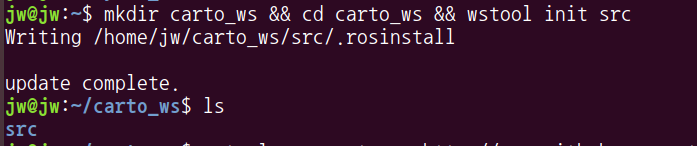
폴더 생성, 소스 다운
mkdir carto_ws && cd carto_ws && wstool init src
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_Ros/master/cartographer_ros.rosinstall
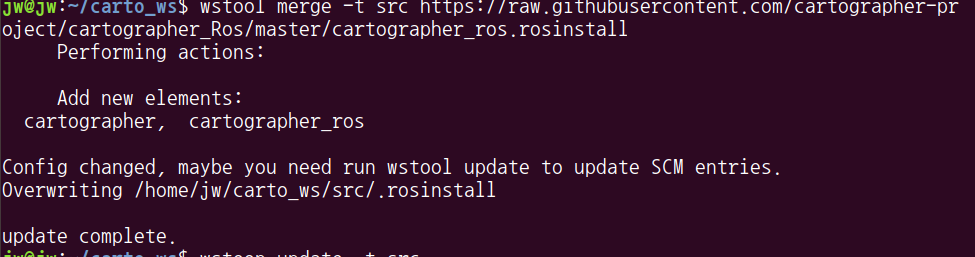
wstool update -t src
dependency 설치
rosdep update
rosdep install --from-path src --ignore-src --rosdistro=${ROS_DISTRO} -y
abseil 설치
src/cartographer/scripts/install_abseil.sh
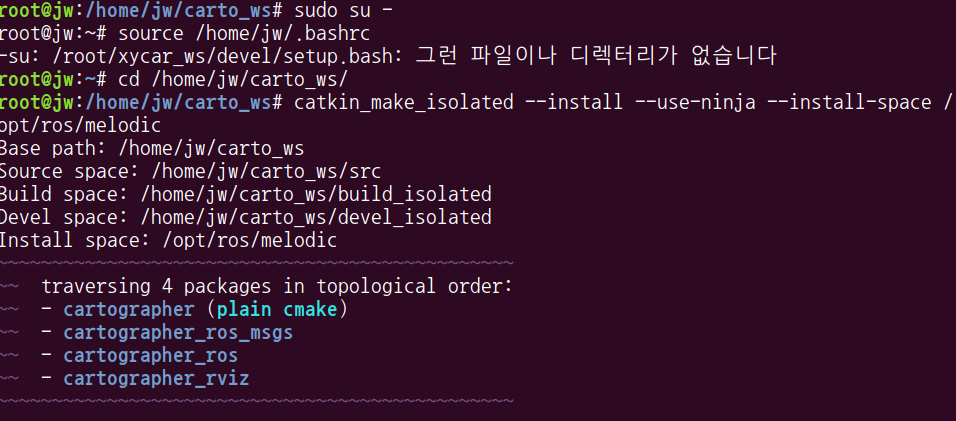
user환경 적용, 설치
sudo su -
source /home/jw/bashrc
cd /home/jw/carto_ws/
catkin_make_isolated --install --use-ninja --install-space /opt/ros/melodic