[Paper Review] RL with KL penalties is better viewed as Bayesian inference
Case : Language model
- : set of sequences of tokens from some vocabulary
- : Language Model (LM)
- : Pretrained LM
- : probability of sequence
- : Reward (Human preferences)
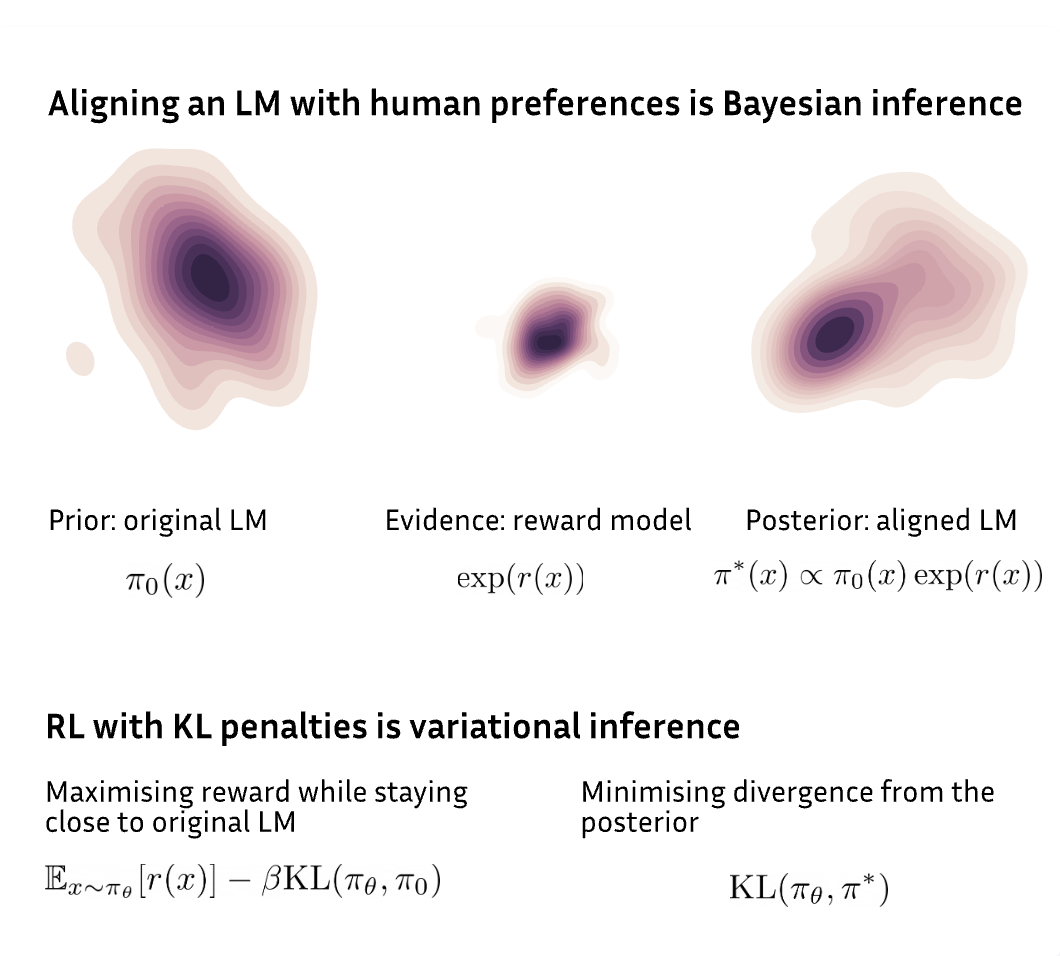
Reinforcement Learning with Human Feedbacks (RLHF)에서 흔히 사용하는 목적식은 아래와 같다.
위 목적식을 최대화하는 는 Donsker-Varadahan Lemma (or duality formula)에 의해 아래의 Gibbs Posterior로 달성됨이 알려져있다. (이를 위해 논문의 Appendix에서도 짧은 가정을 두었다.)
그런데, 일반적으로 Posterior는 구하는게 불가능하다. 전체 Seqeunce space 에 대해서 exponential tilting하는게 어려우니깐... 그래서 자연스러운 접근으로 로 parametrized된 LM 를 고려할 수 있고, 아래와 같이 목적식을 다시 표현할수 있다.
논문의 그림을 보면 더 이해가 잘되는 것 같다.
Without KL Penalty
KL Term을 빼면, Expected Reward Maximization의 문제가 된다. 따라서 Reward가 가장 큰 Sequence에 모든 mass를 두는 dirac delta로 붕괴한다.
Key contribution?
제목 그대로, RLHF를 Bayesian의 언어로 번역하여 다시 프레이밍한 것이 주된 기여같다.
RLHF 관련 글을 볼 때, 가 사전분포의 역할을 하고 loss를 -Reward로 사용하는 Variational Bayes로 해석할 수 있는지 궁금했는데, 이렇게 정리된 논문이 있었다.
Korbak, Tomasz, Ethan Perez, and Christopher Buckley. "RL with KL penalties is better viewed as Bayesian inference." Findings of the Association for Computational Linguistics: EMNLP 2022. 2022.
