DAG 두 번째
(continued)
DAG 할당 (Assignment)
모든 오퍼레이터와 태스크들은 DAG에 할당되어야만 실행이 가능하다.
Airflow는 명시적으로 전달하지 않더라도 DAG을 추정할 수 있는 몇 가지 방법을 제공한다.
with DAG내에서 오퍼레이터를 선언하는 경우@dag데코레이터 내에서 오퍼레이터를 선언하는 경우- DAG이 지정된 오퍼레이터를 업스트림이나 다운스트림으로 지정하는 경우
명시적으로는 dag= 인자에 DAG을 지정한 후 각 오퍼레이터에 전달해야 한다.
기본 인자
DAG 안의 모든 오퍼레이터가 공통적으로 가져야 하는 인자들은 default_args에 담겨져 전달된다.
default_args = {
'start_date': datetime(2016, 1, 1),
'owner': 'airflow'
}
with DAG('my_dag', default_args=default_args) as dag:
op = DummyOperator(task_id='dummy')
print(op.owner) # "airflow"제어 흐름 (Control Flow)
기본적으로 하나의 태스크는 그것이 의존하는 모든 태스크들이 성공했을 때에만 실행된다. 하지만, 이러한 기본 동작을 변경할 수 있는 방법들이 존재한다.
- Branching
- Latest Only
- Depends On Past
- Trigger Rules
Branching
DAG 에게 의존하는 모든 태스크들을 실행하는 대신 하나의 경로를 선택해서 내려가라고 할 수 있다.
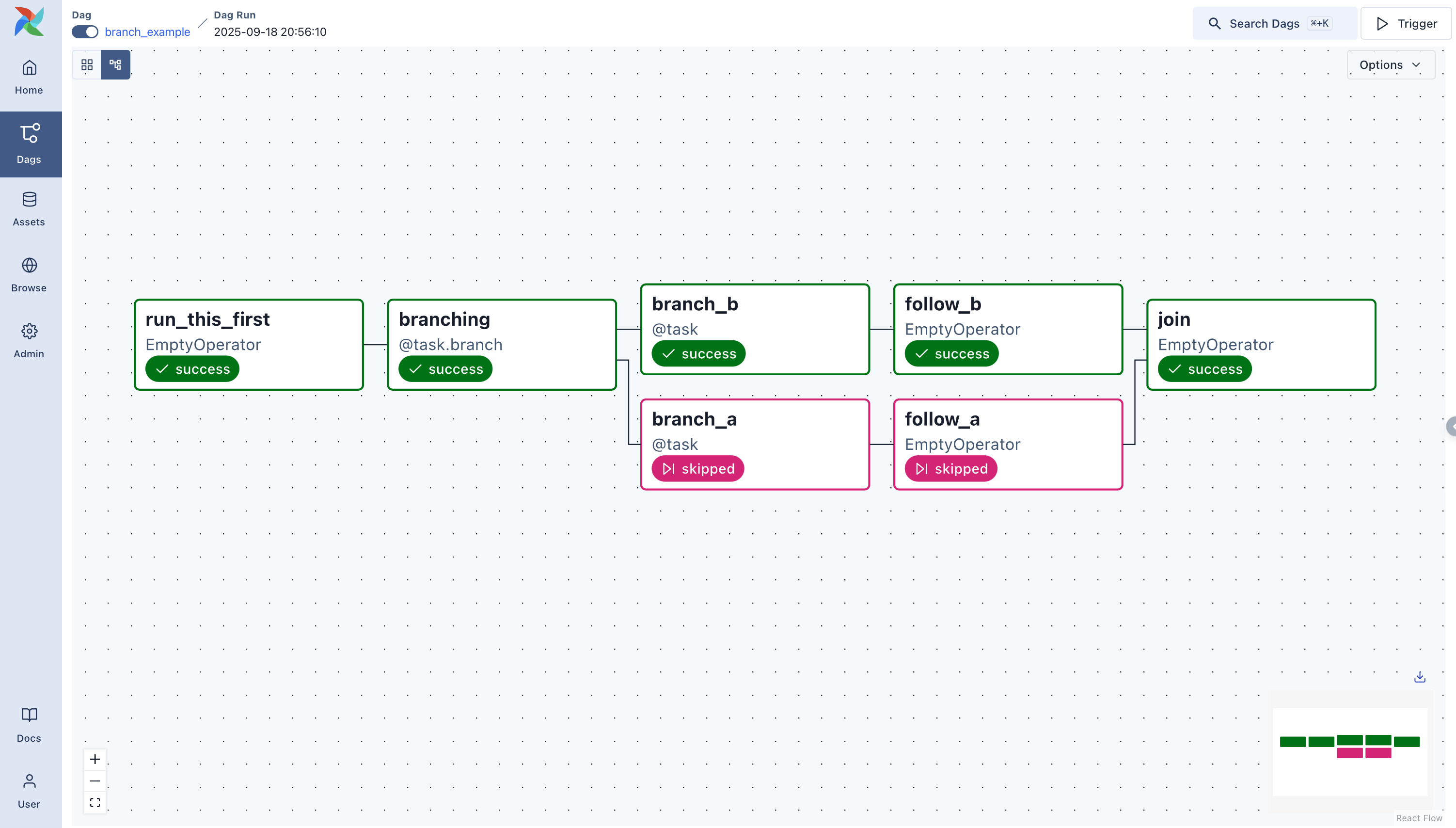
[주의] 태스크가 브랜칭 오퍼레이터의 다운스트림이면서 선택된 태스크들 중 하나의 다운스트림일 경우 건너뛰지 않는다.
위 그림에서 브랜칭 태스크는 branch_a, join 그리고 branch_이다. 여기서 join은 branch_a의 다운스트림이므로 브랜치가 결정되는 과정에서 선택되지 않았음에도 실행될 것이다.
branching 태스크
여기서 브랜칭 오퍼레이터가 등장한다. BranchPythonOperator 는 python_callable 에 Callback 함수를 지정한다. DAG은 Callback 함수에서 리턴되는 태스크의 이름을 따라 실행되며 나머지 경로들은 무시된다.
def branch_func(ti):
xcom_value = int(ti.xcom_pull(task_ids="start_task"))
if xcom_value >= 5:
return "continue_task"
else:
return "stop_task"
start_op = BashOperator(
task_id="start_task",
bash_command="echo 5",
xcom_push=True,
dag=dag,
)
branch_op = BranchPythonOperator(
task_id="branch_task",
python_callable=branch_func,
dag=dag,
)
continue_op = DummyOperator(task_id="continue_task", dag=dag)
stop_op = DummyOperator(task_id="stop_task", dag=dag)
start_op >> branch_op >> [continue_op, stop_op]이 예시는 xcom_value의 값에 따라 서로 다른 태스크를 실행하게 된다.
Latest Only
import datetime as dt
from airflow import DAG
from airflow.operators.dummy import DummyOperator
from airflow.operators.latest_only import LatestOnlyOperator
from airflow.utils.trigger_rule import TriggerRule
with DAG(
dag_id='latest_only_with_trigger',
schedule_interval=dt.timedelta(hours=4),
start_date=dt.datetime(2021, 1, 1),
catchup=False,
tags=['example3'],
) as dag:
latest_only = LatestOnlyOperator(task_id='latest_only')
task1 = DummyOperator(task_id='task1')
task2 = DummyOperator(task_id='task2')
task3 = DummyOperator(task_id='task3')
task4 = DummyOperator(task_id='task4', trigger_rule=TriggerRule.ALL_DONE)
latest_only >> task1 >> [task3, task4]
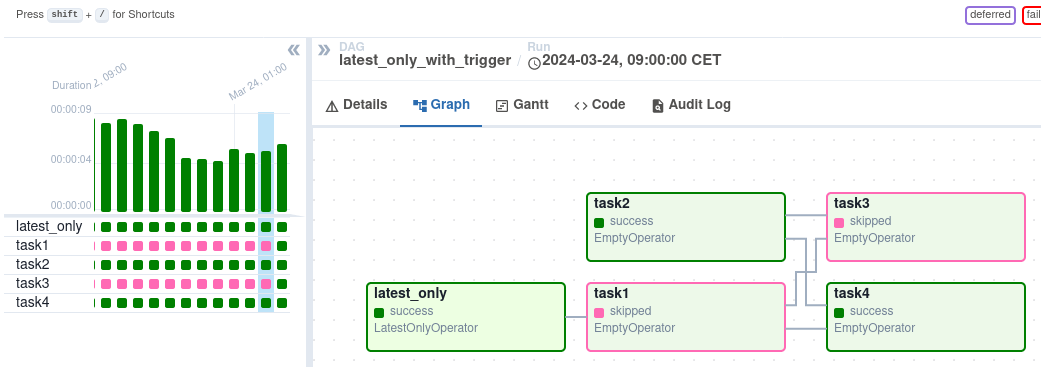
task2 >> [task3, task4]위의 예시에서:
- task1 is directly downstream of latest_only and will be skipped for all runs except the latest.
- task2 is entirely independent of latest_only and will run in all scheduled periods
- task3 is downstream of task1 and task2 and because of the default trigger rule being all_success will receive a cascaded skip from task1.
- task4 is downstream of task1 and task2, but it will not be skipped, since its trigger_rule is set to all_done.
Depends On Past
이전 DAG Ruun 에서 해당 태스크가 성공한 경우에만 실행하기를 원할 경우 태스크의 depends_on_past 인자를 True로 설정한다.
Trigger Rules
기본적으로 Airflow는 업스트림 태스크들이 모두 성공하기를 기다렸다가 해당 태스크를 실행한다.
- all_success (default): All upstream tasks have succeeded
- all_failed: All upstream tasks are in a failed or upstream_failed state
- all_done: All upstream tasks are done with their execution
- one_failed: At least one upstream task has failed (does not wait for all upstream tasks to be done)
- one_success: At least one upstream task has succeeded (does not wait for all upstream tasks to be done)
- none_failed: All upstream tasks have not failed or upstream_failed - that is, all upstream tasks have succeeded or been skipped
- none_failed_min_one_success: All upstream tasks have not failed or upstream_failed, and at least one upstream task has succeeded.
- none_skipped: No upstream task is in a skipped state - that is, all upstream tasks are in a success, failed, or upstream_failed state
- always: No dependencies at all, run this task at any time
[주의] 트리거 규칙과 스킵된 태스크들간의 상호작용을 이해하는 것이 중요하다. 특히 브랜칭 작업간에 스킵된 태스크들에서는 더욱 그러하다.
all_success나 all_failed인 브랜칭 연산의 다운스트림을 사용하고 싶지는 않을 것이기 때문이다.
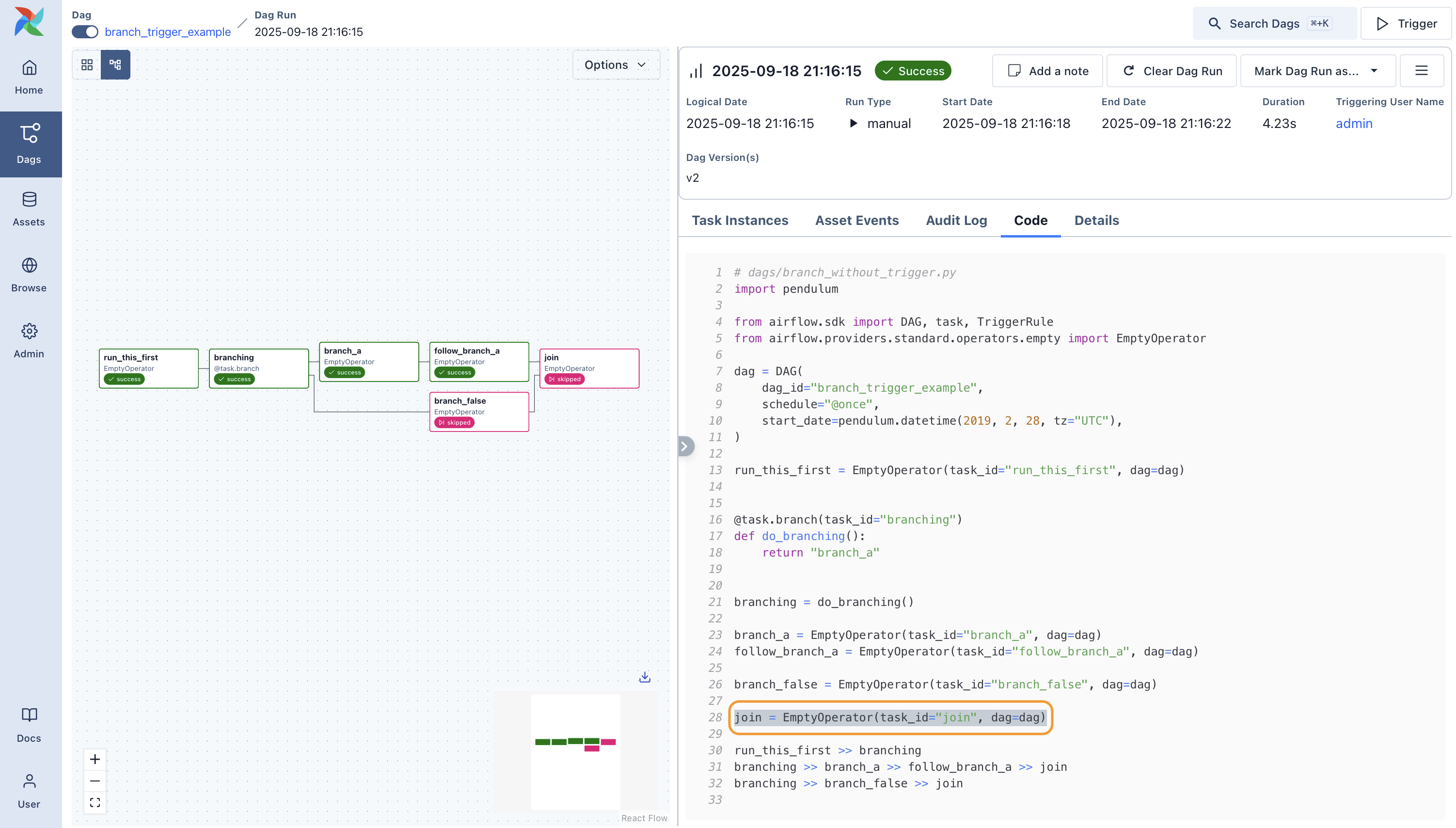
Skipped tasks will cascade through trigger rules all_success and all_failed, and cause them to skip as well. Consider the following DAG:
# dags/branch_without_trigger.py
import datetime as dt
from airflow.models import DAG
from airflow.operators.dummy import DummyOperator
from airflow.operators.python import BranchPythonOperator
dag = DAG(
dag_id="branch_without_trigger",
schedule_interval="@once",
start_date=dt.datetime(2019, 2, 28),
)
run_this_first = DummyOperator(task_id="run_this_first", dag=dag)
branching = BranchPythonOperator(
task_id="branching", dag=dag, python_callable=lambda: "branch_a"
)
branch_a = DummyOperator(task_id="branch_a", dag=dag)
follow_branch_a = DummyOperator(task_id="follow_branch_a", dag=dag)
branch_false = DummyOperator(task_id="branch_false", dag=dag)
join = DummyOperator(task_id="join", dag=dag)
run_this_first >> branching
branching >> branch_a >> follow_branch_a >> join
branching >> branch_false >> joinjoin은 follow_branch_a와 branch_false의 다운스트림이다.. join 태스크는 스킵된 것으로 보여질 것이다. 왜냐하면 trigger_rule이 all_success로 기본설정되어 있어서이다. 그리고 브랜칭 연산에 의해서 초래된 스킵은 따라 내려가면서 all_success로 표시된 태스크들을 건너뛴다.
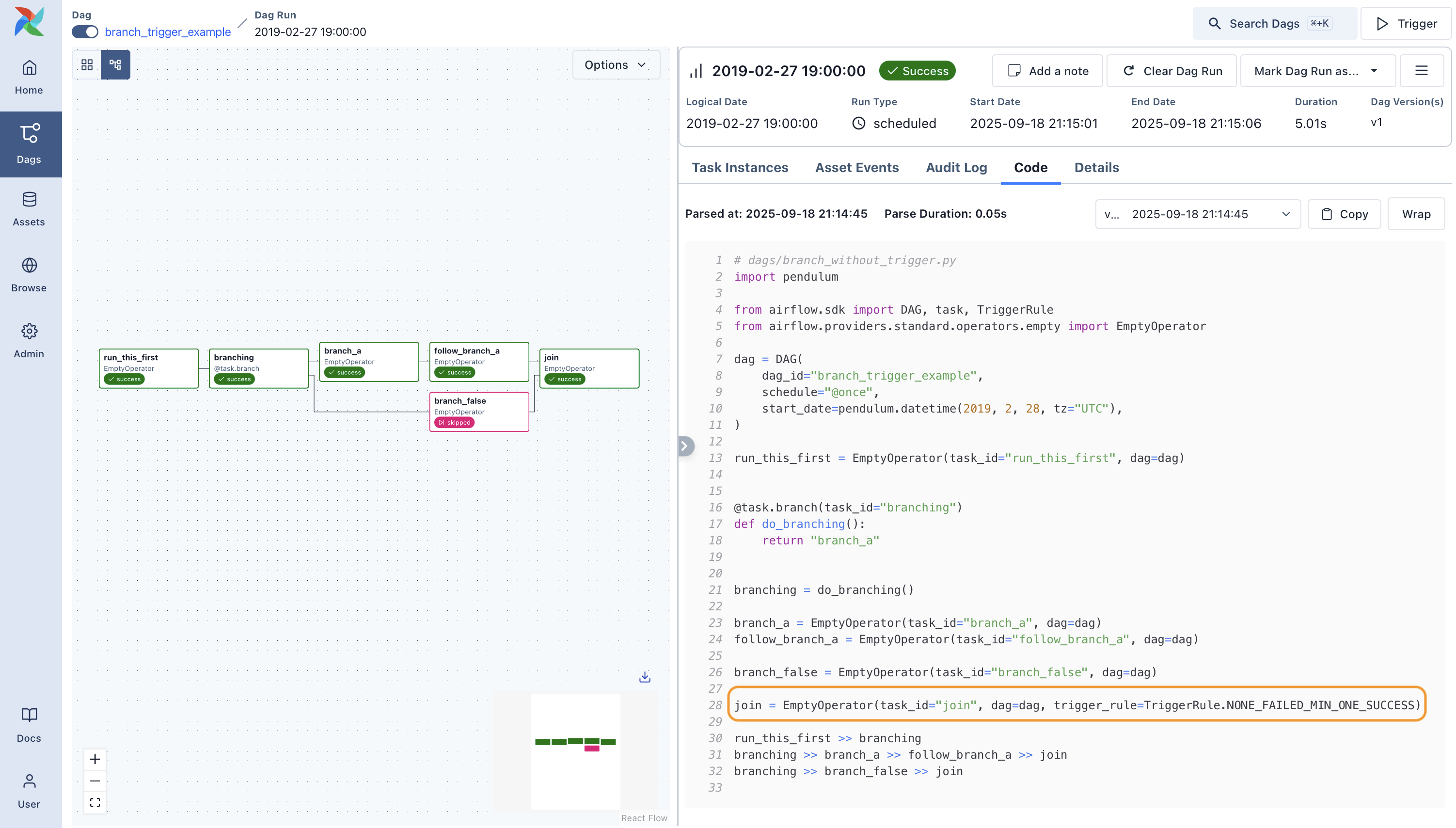
join 태스크의 trigger_rule을 none_failed_min_one_success로 설정하면, 대신에 의도된 결과를 얻을 수 있다.
참고자료
