아무것도 모르는데 일단 세팅 시작해봤음.

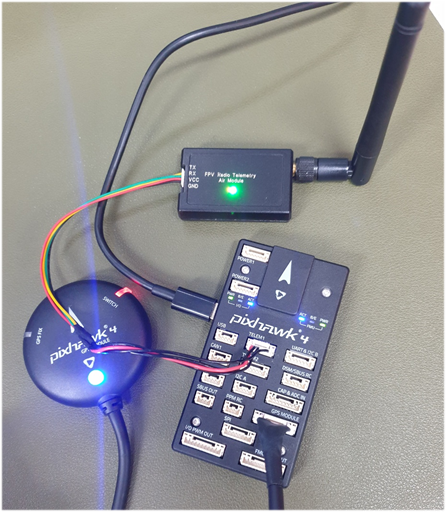
이 두 친구를 활용해서 base랑 drone이랑 통신을 해야됨.
Telemetry 설명 문서
base를 PC에 연결하고 테스트 해보려니까 인식을 못하는 것을 발견.
인식이 안 되는지도 몰랐음.
윈도우 장치 관리자에서 아래와 같이 Warning이 뜸.
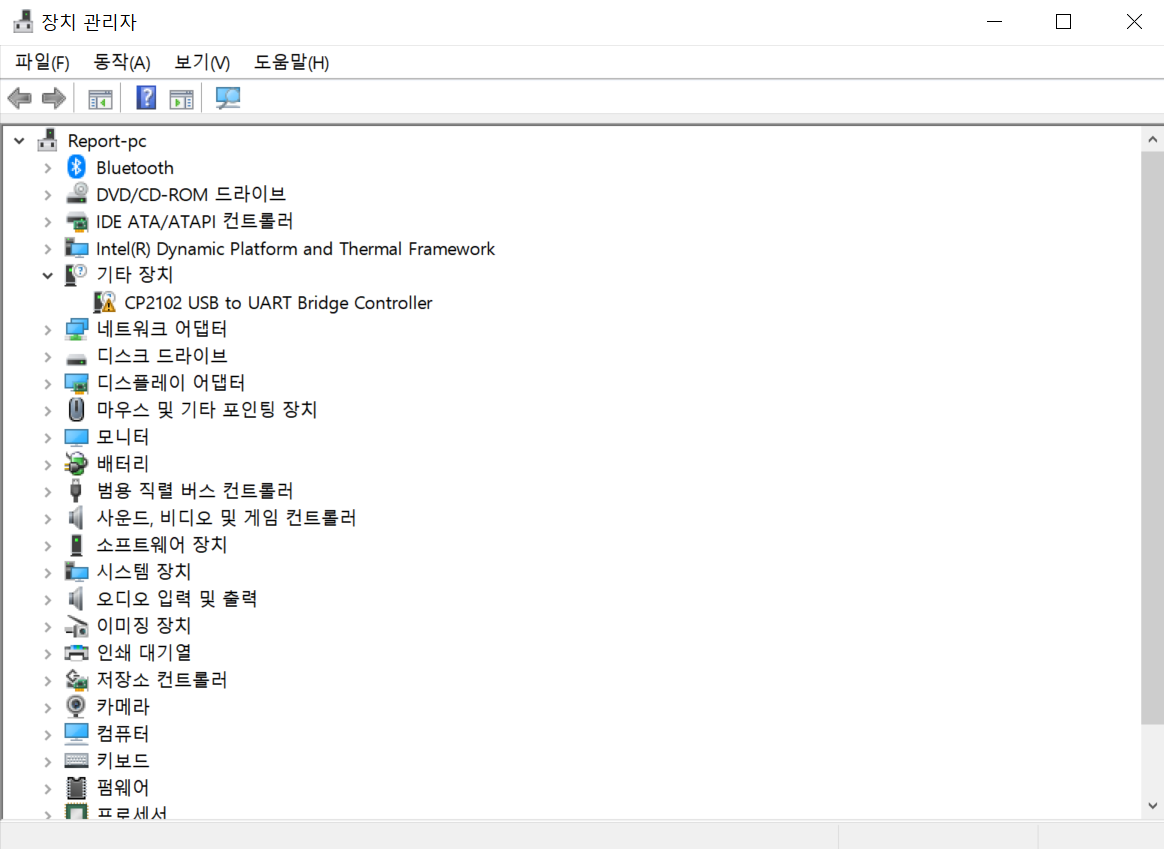
저 Telemetry module을 윈도우에서 인식하려면 드라이버가 있어야 됨.
드라이버 다운 링크
 그래서 뭘 깔면 되는건데 ㅡㅡ
그래서 뭘 깔면 되는건데 ㅡㅡ
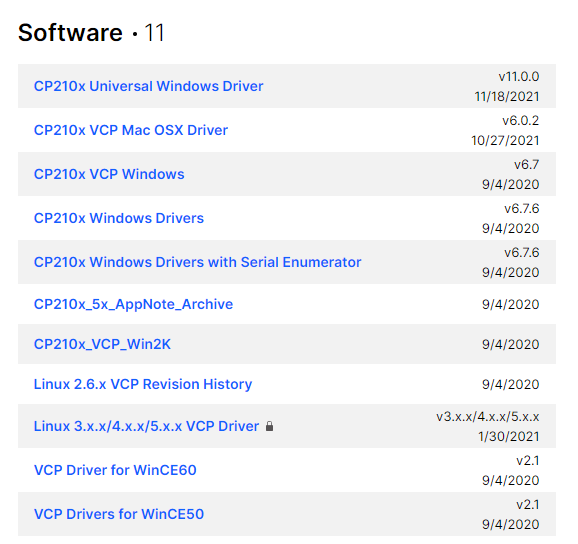
CP120x VCP Windows 를 설치하면 된다.
+CP120x VCP Windows 파일이 사라졌음... CP210x Windows Drivers 다운받으면 됨.
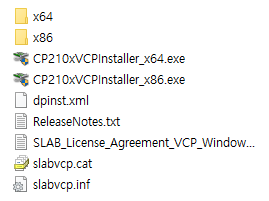
설치하면 실행 파일이 또 2개임...
CP210xVCPInstaller_x64.exe 이걸로 실행하면 된다. x86은 32bit 운영체제용.
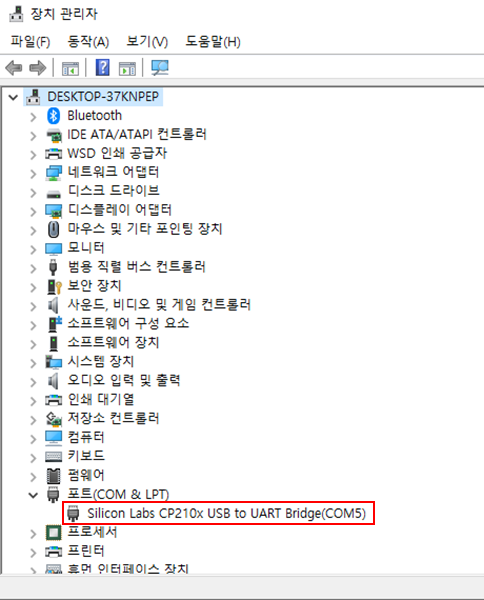
이제 포트에 잡히는 것을 확인할 수 있다.
Telemetry를 PC에 USB로 연결하고 포트에 잡혔으면 Mission Planner 실행한다.
Pixhawk에도 아래처럼 Telemetry 모듈을 TELEM1에 연결.
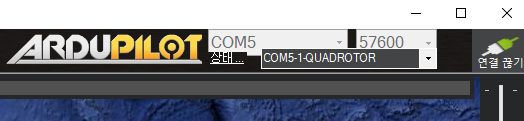
Mission Planner 우측 상단에 1. 포트 선택 하는거랑 2. Baud Rate 선택하는게 있음.
포트는 Telemetry 연결한 포트로 선택해주면 되고, 사용 중인 Telemetry 모듈의 Baud Rate는 57600임.
연결 버튼을 눌러주면 알아서 잘 연결됨.
RTK-GPS 연결

Mission Planner의 좌측 상단 설정탭에서 RTK/GPS Inject를 누르면 RTK Base에 연결할 수 있다.
포트는 Base를 USB로 연결한 포트를 선택해주면 되고, 내가 사용 중인 Holybro의 H-RTK F9P 모델은 Baud Rate가 115200이다.

연결되면 오른쪽 연결 상태를 통해서 데이터가 수신되고 있음을 확인할 수 있다.
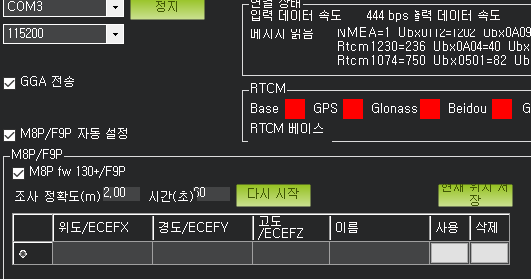
밑에 조사 정확도와 시간이 있는데, 조사 정확도는 얻고자 하는 Base 위치의 최대 오차 범위다. 시간은 입력한 조사 정확도를 얻기 위해서 Base가 위치를 잡기 위해 조사의 최소 시간이다.
입력을 했으면 다시 시작 버튼을 누르면 조사를 시작한다.
The GPS base station will need some time to find enough GPS satellites to achieve the level of accuracy you selected, less accuracy requires less GPS satellites. With a good view of the sky it can take several minutes to achieve the absolute accuracy of 2m, about an hour to achieve the absolute accuracy of 30cm, and several hours to achieve the accuracy of 10cm.
제품 Manual에 있는 내용을 인용했다. Base가 자신의 위치를 Positioning 하기 위해서 충분한 위성 개수를 찾을 때까지 시간이 필요하다. 2m의 정확도를 위해서는 몇분, 30cm는 약 한 시간, 10cm를 위해서는 몇 시간 이상이 소요된다고 한다.
Base의 절대적 위치를 위해서는 많은 시간이 소요된다. 그런데, Base의 절대적 위치 정확도가 2m 수준이더라도 Base와 Drone 사이의 상대 위치 정확도는 cm수준을 달성할 수 있다고 한다.

실내에서 GPS 수신이 얼마나 안 되는지 무지했는데, 진짜 전혀 안 되는 것을 확실히 경험했다.
사진처럼 컴퓨터 앞에서 저러고 있어봐야 어떤 위성 데이터도 수신할 수 없다.

혼자 힘으로 바리바리 싸들고 나갈 수가 없어서 마지못해 창문에다가 Base를 두고 조사를 시작해봤다.
*참고로 책상에서 사용한 것은 F9P Helical 모델이고, 창문 앞에 둔 것은 F9P Base 모델이다.
F9P Helical 은 Base로써도 사용할 수 있고, Drone에 사용할 수도 있다. 당연히 F9P Base 모델을 Base로 사용하는 것이 더 좋다.
여담인데, Holybro의 H-RTK F9P는 세 가지 모델이 있다.
아직 소개 안 된 것이 F9P Rover lite이다. Pixhawk 를 구매하면 딸려오는 GPS 수신기와 똑같이 생겨서 같은 것인줄 알았는데, 아무튼 결론은 다른 것이다. Rover lite 모델은 Base로 활용할 수 없다.


창문 앞에 Base를 두니까 위성 정보를 수신하기 시작했다. 아래 블럭들이 수신되는 위성 개수를 의미하고,각 블럭의 초록색 게이지가 신호의 세기를 의미한다.
수신하기는 하는데, 계속 Position Invalid에서 벗어나지 못한다.
아무래도 나가서 다시 테스트 해봐야겠다.
로그 분석

실험적으로는 Telemetry가 연결된 순간부터 연결을 끊을 때까지 자동으로 위와 같은 로그 파일이 생성된다. .rlog파일은 뭔지 모르겠고, 일단 .tlog파일은 Telemetry Log 이다.
Tlogs are automatically created the moment you press the connect button on the ground station.
연결 버튼을 누르는 순간 자동으로 로그파일이 생성된다고 한다.
