
CAN이란?
- CAN(Controller Area Network)은 차량 내에서 호스트 컴퓨터 없이 마이크로 컨트롤러나 장치들이 서로 통신하기 위해 설계된 표준 통신 규격
- 차량 내 ECU들은 CAN 프로토콜을 사용하여 통신
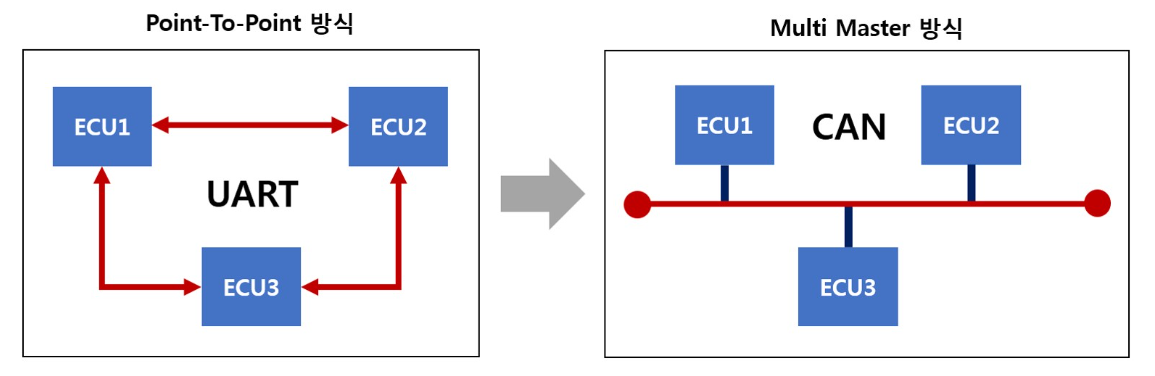
- CAN은 차량의 여러 ECU들이 증가하면서 기존의 UART 통신 방식으로는 한계가 생겨 개발된 버스 기반 통신 프로토콜이다
CAN의 장단점
- 장점
- 배선 간소화 및 비용 절감
- ID를 통한 우선순위 기반 통신
- Multi Master 통신
- 차동 신호 방식을 사용하여 노이즈에 강한 통신
- 고속 및 장거리 통신 (최대 1Mbps, 최대 1km)
- 단점
- 연결할 노드나 장치 수에 제한이 있음 (최대 64개 노드)
- 전압 레벨이 달라 전기적 잡음 많음
- 보안 취약
CAN 통신 방식
- CAN은 CSMA/CD+AMP(Carrier Sense Multiple Access with Collision Detection and Arbitration on Message Priority) 방식을 사용하여 네트워크 내에서 다수의 노드가 동시에 데이터를 전송할 때 충돌을 방지하고 우선순위가 높은 메시지를 우선적으로 전송할 수 있도록 한다
- CSMA: 각 노드는 전송을 시도하기 전 버스가 비어있는지 확인
- CD: 동시에 여러 노드가 전송을 시도할 때 충돌을 감지하고 우선순위가 낮은 노드는 전송을 중지 시킴
- AMP: ID를 이용하여 우선순위를 결정하고 충돌 발생 시 우선순위가 높은 메시지가 먼저 전송 (ID가 낮을수록 우선순위가 높음)
- CAN은 Multi-Master 통신을 지원하며 네트워크 내 모든 노드가 송신할 수 있는 권한을 갖음
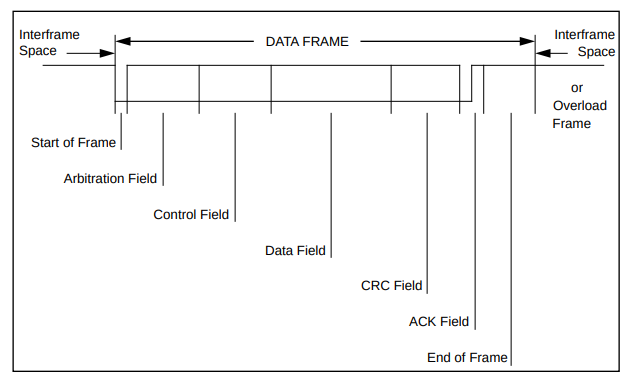
CAN Frame 구조
- Data Frame: 실제 데이터를 포함하는 프레임
- Remote Frame: 데이터 요청 프레임으로 특정 ID의 데이터를 요청할 때 사용하며 요청하는 데이터 길이만 설정
- Error Frame: 오류 발생 시 네트워크에 알리는 프레임으로 오류가 감지되면 모든 노드에 에러 상태를 알림
- Overload Frame: 데이터 처리 지연이 필요할 때 사용하는 프레임으로 이전 프레임과 다음 프레임 사이의 지연 시간을 설정
- InterFrame Space: Data Frame과 Remote Frame을 이전 프레임과 분리하기 위해 사용
CAN Data Frame
- Start of Frame(SOF)
- 1bit, 프레임의 시작을 알리는 비트
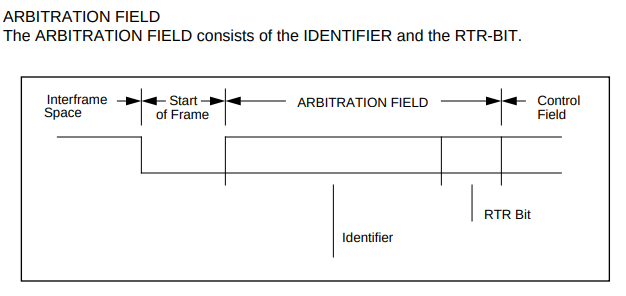
- Arbitration Field
- Identifier(ID)
- 11bit, 메시지의 우선순위와 내용을 식별하며 값이 낮을수록 우선순위가 높다
- 11bit 모두가 recessive면 안됨
- Remote Transmission Request(RTR)
- 1bit, data frame에서는 항상 0으로 설정하며 remote frame에서만 사용
- Identifier(ID)
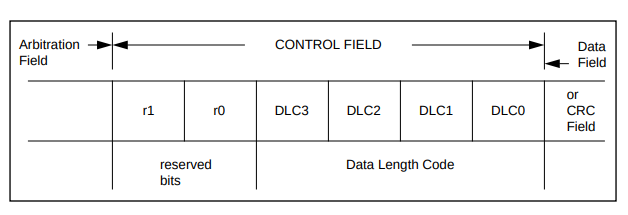
- Control Field
- 6bit, DLC 포함하며 최대 8byte까지 설정
- DLC는 0~8까지 이진수와 동일하게 dddr = 1 이렇게 표현됨
- d: dominant, r: recessive
- Data Field
- 0~8bit, 전송 데이터 포함된 필드로 최대 8byte 전송
- 최상위 비트(MSB, Most Significant Bit)를 먼저 전송
- Cyclic Redundancy Check(CRC)
- 15bit, 오류 검출 필드
- Acknowledgement(ACK)
- 2bit, response 같은거, 수신 측에서 송신 측에 확인 메시지
- End of Frame(EOF)
- 7bit, 프레임의 끝을 알리는 비트
reference

Embedded Software Engineer