unitree go2 - sensor - Lidar
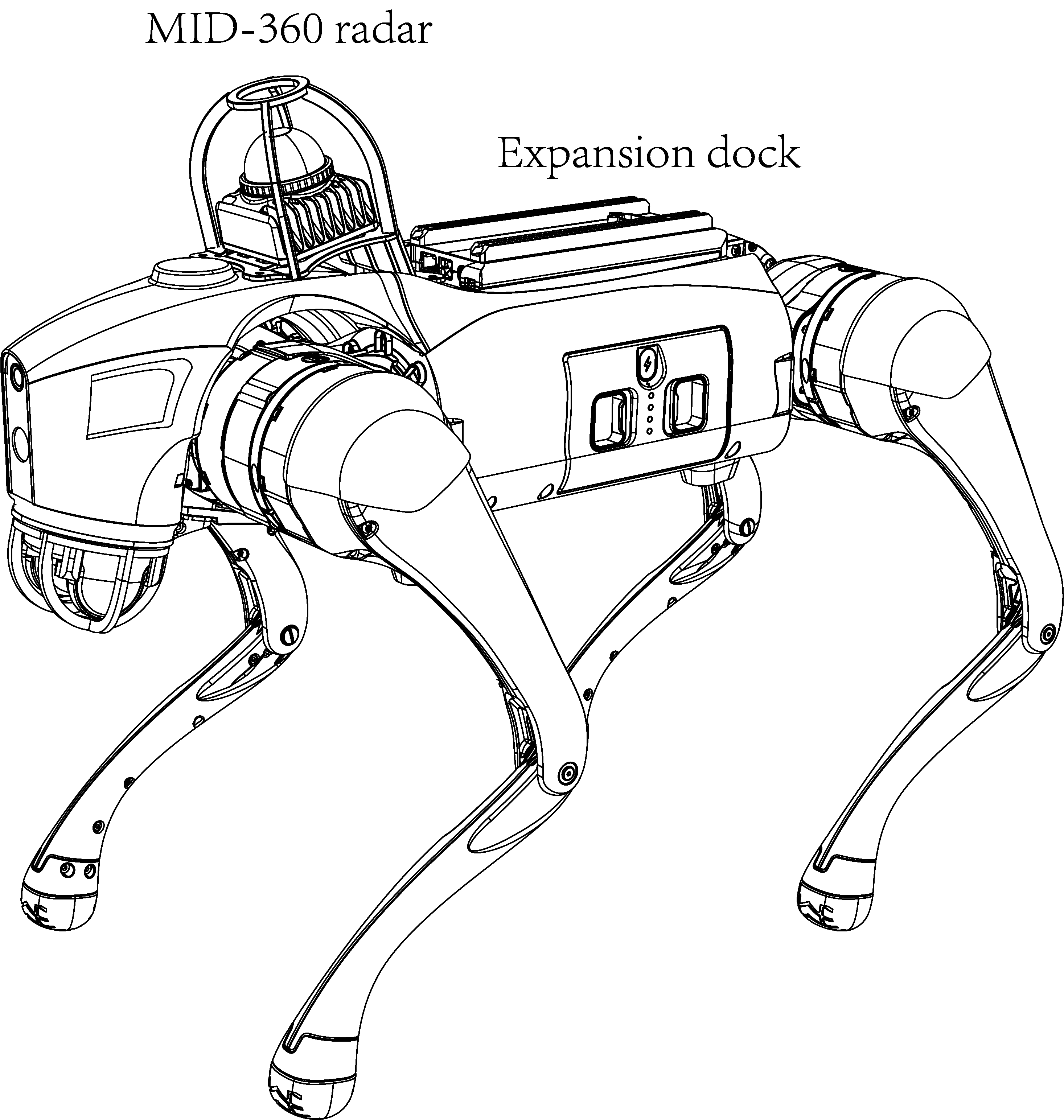
The coordinates of the Mid-360 lidar in the IMU coordinate system inside the Go2 body are (0.1870, 0, 0.0803), and it rotates 13 ° around the Y-axis. The relative rotation and translation relationship of Mid-360 in the IMU coordinate system inside the Go2 body can be represented by the following transformation matrix:
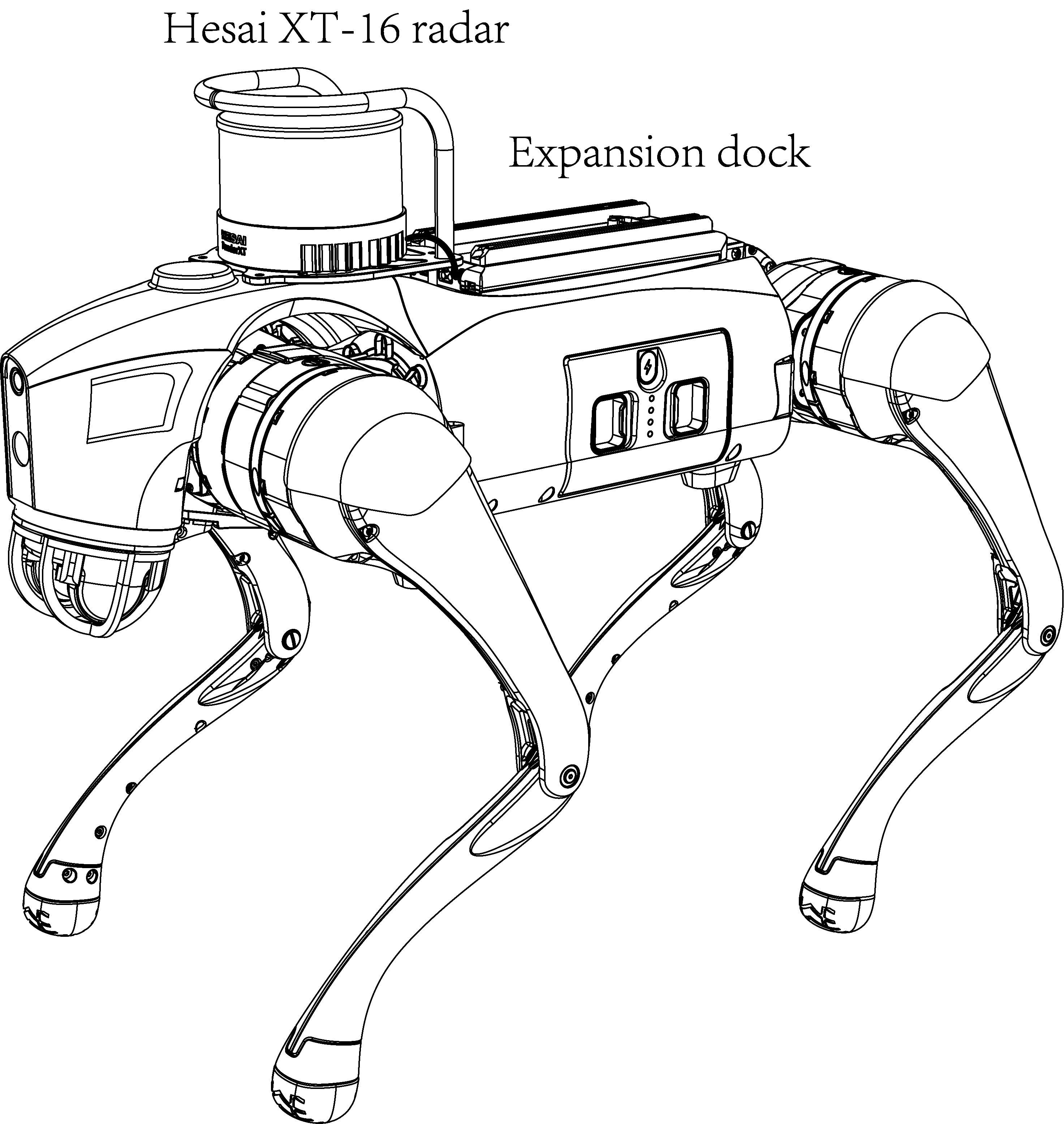
The coordinates of the XT-16 lidar in the IMU coordinate system inside the Go2 body are (0.1710, 0, 0.0908), without relative rotation. The relative rotation and translation relationship of XT-16 in the IMU coordinate system inside the Go2 body can be represented by the following transformation matrix:
go2.xml
/lowstate/imu/...
go2.xml에서 얻은 걸로 imu와 body frame간의 관계
- Translation: x = -0.02557 m, y = 0 m, z = 0.04232 m
- Rotation: roll = 0, pitch = 0, yaw = 0
<joint name="imu_joint" type="fixed">
<origin xyz="-0.02557 0 0.04232" rpy="0 0 0" />
<parent link="base_link" />
<child link="imu" />
</joint>utlidar u1
utlidar/...
radar와 body frame간의 관계
Translation (위치):
- x = 0.28945 m (로봇 앞쪽으로 약 29cm)
- y = 0 m
- z = -0.046825 m (약간 아래쪽)
Rotation (회전):
- roll = 0 rad
- pitch = 2.8782 rad (약 165°) - 거의 뒤집힌 상태
- yaw = 0 rad
<joint name="radar_joint" type="fixed">
<origin xyz="0.28945 0 -0.046825" rpy="0 2.8782 0" />
<parent link="base_link" />
<child link="radar" />
</joint>radar frame의 원점을 base frame에서 어떻게 보이는지
레이더 공간의 벡터 vᵣₐdₐᵣ 를 body(base) 공간으로 바꿀 때 쓰는 변환.
