sotif 인지모델 실행 메뉴열
1. 사전 셋업
1.1 도커와 로컬 GUI 연결
- 로컬 터미널에 다음 명령어 실행
xhost +local:docker1.2 도커 컨테이너 실행
-
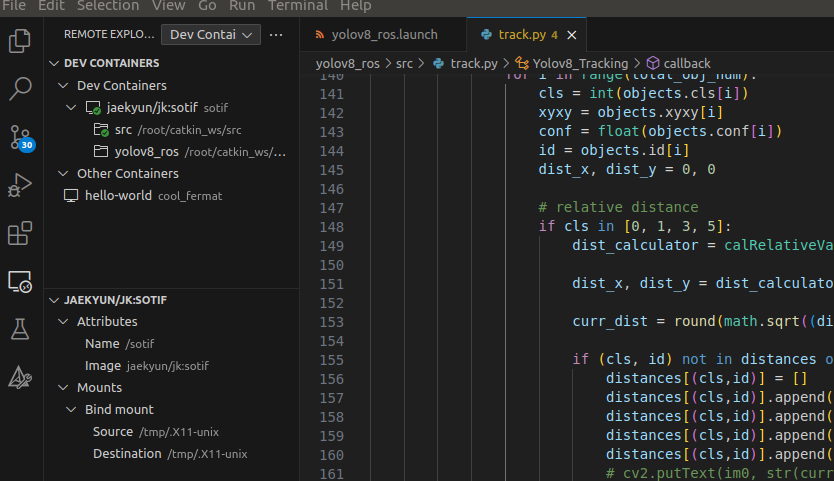
vscode 접속 후 좌측메뉴에서 remote Explorer > Dev Container > jaekyun/jk:sotif 실행
-
도커 터미널에서 setup.bash 실행
source /root/catkin_ws/devel/setup.bash2. 작업공간 설명(참고용)
- 작업공간: /root/catkin_ws/src/yolov8_ros
- src: 인지모델 소스코드들 존재
- bagfiles: 테스트할 bag파일들 놓는 곳
- weights: yolov8 모델 가중치 놓는 곳
- results: 결과 이미지 저장되는 곳
- launch: 런치파일 있는 곳
2. 테스트 방법
2.1 bagfile 테스트
- bagfile은 반드시
/vds_node_localhost_2210/image_raw,gt_5토픽을 가지고 있어야 함 - 테스트할 bag파일을 /root/catkin_ws/src/yolov8_ros/bagfiles/에 위치
- 도커 터미널에서 다음 명령어 실행
roslaunch yolov8_ros yolov8_ros.launch bagfile:=/root/catkin_ws/src/yolov8_ros/bagfiles/no8.bagbagfile:=/root/catkin_ws/src/yolov8_ros/bagfiles/no8.bag문장을 안쓰면 no8.bag을 default로 사용
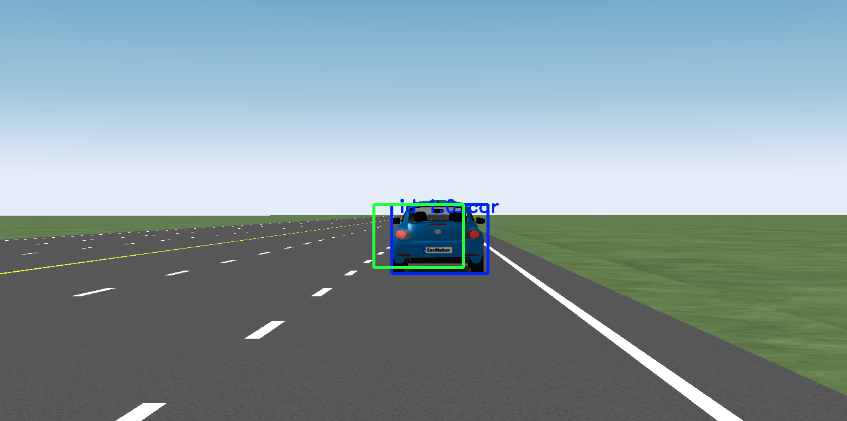
- 파란색 박스: 인지결과, 초록색 박스: gt
- gt 박스가 밀리거나 이미지 토픽이 밀리는 현상은 현재 해결중에 있으나 성능 평가에 영향을 미치지는 않음
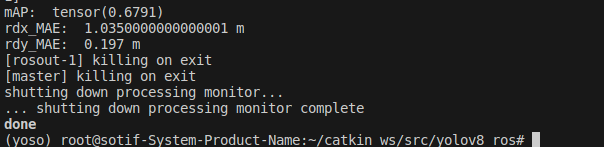
- bag파일 play 끝난 후 ctrl+c누르면 터미널에서 인지성능 확인 가능
2.2 Disturbance모델 적용 테스트(예상)
- 인지모델 도커 내
/root/catkin_ws/src/yolov8_ros/launch/disturbance.launch에서
<arg name="input" default="/vds_node_localhost_2210/image_raw"/>부분을 disturbance모델 거친 후 발행되는 토픽 이름으로 대체
# disturbance.launch
<launch>
<!-- Detection configuration -->
<arg name="weights" default="$(find yolov8_ros)/src/n200_best.pt"/>
<arg name="data" default="$(find yolov8_ros)/src/yolov8_tracking/yolov8/ultralytics/yolo/data/datasets/sotif.yaml"/>
<arg name="device" default="0"/>
<!-- replace imgsz -->
<arg name="inference_size_h" default="1080"/>
<arg name="inference_size_w" default="1920"/>
<!-- ROS topics -->
<arg name="input" default="/vds_node_localhost_2210/image_raw"/> # 이 부분 수정
<arg name="gt" default="/gt_5"/>
<arg name="output_topic" default="/yolov5/detections"/>
<arg name="bagfile" default="$(find yolov8_ros)/no8.bag -d 5 --wait-for-subscribers"/>
<!-- Optional topic (publishing annotated image) -->
<arg name="publish_image" default="false"/>
<arg name="output_image_topic" default="/yolov5/image_out"/>
<node name="yolov8" pkg="yolov8_ros" type="track.py" output="screen" >
<param name="weights" value="$(arg weights)"/>
<param name="data" value="$(arg data)"/>
<param name="device" value="$(arg device)" />
<param name="input" value="$(arg input)"/>
<param name="gt" value="$(arg gt)"/>
<param name="output_topic" value="$(arg output_topic)"/>
<param name="inference_size_h" value="$(arg inference_size_h)"/>
<param name="inference_size_w" value="$(arg inference_size_w)"/>
<param name="publish_image" value="$(arg publish_image)"/>
<param name="output_image_topic" value="$(arg output_image_topic)"/>
</node>
<node pkg="rosbag" type ="play" name="rosbag_play" args="$(arg bagfile)" />
</launch>
- disturbance 모델 노드 실행
- 인지모델 도커 내 터미널에서
roslaunch yolov8_ros disturbance.launch bagfile:=/root/catkin_ws/src/yolov8_ros/bagfiles/no8.bag실행
-bagfile 끝나면 인지모델 도커 내 터미널에서 ctrl+c 후 성능 확인
3. 도커 사용 팁
- vscode에서 사용하면 편리
- 로컬 -> 도커 내부로 파일 옮기는 법
- drag & drop
- 도커 -> 로컬로 파일 꺼내는 법
- 꺼내고 싶은 파일에 마우스 우클릭 후 download
- 컴퓨터 재부팅 할때마다 로컬 터미널에
xhost +local:docker실행
