1. 리매핑
리매핑이란
- 영상의 특정 위치 픽셀을 다른 위치에 재배치하는 일반적인 프로세스
- 어파인 변환, 투시변환을 포함한 다양한 변환을 리매핑으로 표현 가능

OpenCV remap()
void remap(InputArray src, OutputArray dst, InputArray map1, InputArray map2,
int interpolation, int borderMode = BORDER_CONSTANT, const Scalar&
borderValue = Scalar());- src: 입력영상
- dst: 결과영상. map1과 같은 크기, src와 같은 타입.
- map1: 결과영상의 각 픽셀이 참조할 입력영상의(x,y)좌표 또는 x좌표를 담고 있는 행렬.
- map2: 결과영상의 (x,y) 좌표가 참조할 입력영상의 y좌표를 담고있는 행렬. CV_16UC1 또는 CV_32FC1.
- interpolation: 보간법
- borderMode: 가장자리 픽셀확장 방식
- borderValue: BORDER_CONSTANT일 때 사용할 상수 값
코드
#include <iostream>
#include "opencv2/opencv.hpp"
using namespace std;
using namespace cv;
int main()
{
Mat src = imread("tekapo.bmp");
if (src.empty()) {
cerr << "Image laod failed!" << endl;
return -1;
}
int w = src.cols;
int h = src.rows;
Mat map1 = Mat::zeros(h*2, w*2, CV_32FC1);
Mat map2 = Mat::zeros(h*2, w*2, CV_32FC1);
for (int y = 0; y < h*2; y++) {
for (int x = 0; x < w*2; x++) {
map1.at<float>(y, x) = (float)x/2;
map2.at<float>(y, x) = (float)y;
//map2.at<float>(y, x) = (float)h - 1 - y;
//map2.at<float>(y, x) = (float)y/2;
}
}
Mat dst;
remap(src, dst, map1, map2, INTER_LINEAR);
//remap(src, dst, map1, map2, INTER_LINEAR, BORDER_DEFAULT);
imshow("src", src);
imshow("dst", dst);
waitKey();
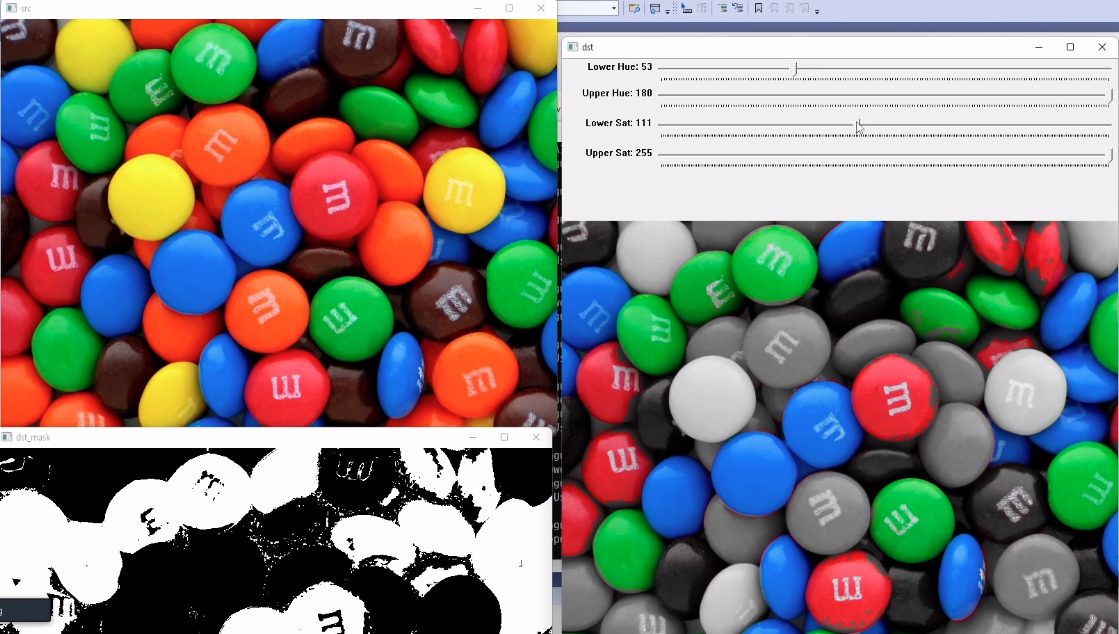
}2. 특정 색영역 추출
- 영상에서 특정 색 영역만 추출하고 싶을 때는 BGR보다 HSV, YCrCb가 더 유리하다.
OpenCV 범위선택함수
void inRange(InputArray src, InputArray lowerb, InputArray upperb, OutputArray dst);- src: 입력행렬
- lowerb: 하한 값
- upperb: 상한 값
- dst: 입력 영상과 동일 크기 CV_8UC1 타입. 범위 안에 들어가는 픽셀 값만 255로 설정됨.
실습코드
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int pos_hue1 = 5, pos_hue2 = 30, pos_sat1 = 200, pos_sat2 = 255;
Mat src, src_hsv, dst, dst_mask;
void on_hsv_changed(int, void*)
{
Scalar lowerb(pos_hue1, pos_sat1, 0);
Scalar upperb(pos_hue2, pos_sat2, 255);
inRange(src_hsv, lowerb, upperb, dst_mask);
cvtColor(src, dst, COLOR_BGR2GRAY);
cvtColor(dst, dst, COLOR_GRAY2BGR);
src.copyTo(dst, dst_mask);
imshow("dst_mask", dst_mask);
imshow("dst", dst);
}
int main(int argc, char* argv[])
{
if (argc < 2) {
src = imread("flower1.png", IMREAD_COLOR);
} else {
src = imread(argv[1], IMREAD_COLOR);
}
if (src.empty()) {
cerr << "Image load failed!" << endl;
return -1;
}
cvtColor(src, src_hsv, COLOR_BGR2HSV);
imshow("src", src);
namedWindow("dst");
createTrackbar("Lower Hue", "dst", &pos_hue1, 180, on_hsv_changed);
createTrackbar("Upper Hue", "dst", &pos_hue2, 180, on_hsv_changed);
createTrackbar("Lower Sat", "dst", &pos_sat1, 255, on_hsv_changed);
createTrackbar("Upper Sat", "dst", &pos_sat2, 255, on_hsv_changed);
on_hsv_changed(0, 0);
waitKey();
return 0;
}결과영상
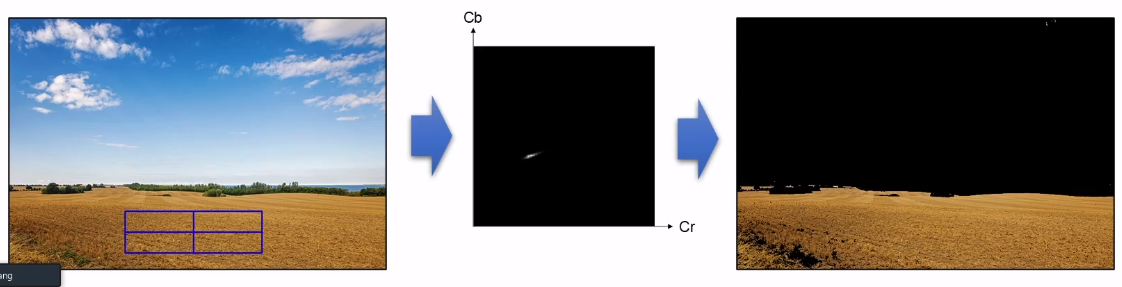
3. 히스토그램 역투영
-
주어진 히스토그램 모델에 영상의 픽셀들이 얼마나 일치하는지 검사하는 방법
-
임의의 색상 영역을 검출할 때 효과적
-
영상에서 검출하고자 하는 영역을 YCrCb 색공간으로 변경
-
Cr, Cb 좌표공간에 히스토그램 작성.
-
해당 히스토그램에 포함되는 영역을 영상에서 추출
OpenCV 히스토그램 역투영 함수
void calcBackProject(const Mat* images, int nimages, const int* channels, InputArray hist,
OutputArray backProject, const float** ranges, double scale = 1,
bool uniform = true);- images: 입력 영상 주소
- nimages: 입력 영상 개수
- channels: 역투영 계산에 사용할 채널 목록
- hist: 입력 히스토그램
- backProject: 히스토그램 역투영 결과 행렬. 입력영상과 동일 크기, CV_8U. 발생 빈도가 높으면 원소값이 크게 나타남.
- ranges: 히스토그램 빈 경계값 배열의 배열
실습코드
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
// Calculate CrCb histogram from a reference image
Mat src = imread("cropland.png", IMREAD_COLOR);
if (src.empty()) {
cerr << "Image load failed!" << endl;
return -1;
}
Rect rc = selectROI(src);
Mat src_ycrcb;
cvtColor(src, src_ycrcb, COLOR_BGR2YCrCb);
Mat crop = src_ycrcb(rc);
Mat hist;
int channels[] = {1, 2};
int cr_bins = 128; int cb_bins = 128;
int histSize[] = {cr_bins, cb_bins};
float cr_range[] = {0, 256};
float cb_range[] = {0, 256};
const float* ranges[] = {cr_range, cb_range};
// 부분영상에 대한 히스토그램 계산
calcHist(&crop, 1, channels, Mat(), hist, 2, histSize, ranges);
// 전체 영상에 대해 히스토그램 역투영
Mat backproj;
calcBackProject(&src_ycrcb, 1, channels, hist, backproj, ranges, 1, true);
Mat dst = Mat::zeros(src.rows, src.cols, CV_8UC3);
src.copyTo(dst, backproj);
//imshow("src", src);
imshow("dst", dst);
waitKey();
return 0;
}실습코드2
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace cv;
using namespace std;
int main()
{
// Calculate CrCb histogram from a reference image
Mat ref, ref_ycrcb, mask;
ref = imread("ref.png", IMREAD_COLOR);
mask = imread("mask.bmp", IMREAD_GRAYSCALE);
cvtColor(ref, ref_ycrcb, COLOR_BGR2YCrCb);
Mat hist;
int channels[] = { 1, 2 };
int cr_bins = 128; int cb_bins = 128;
int histSize[] = { cr_bins, cb_bins };
float cr_range[] = { 0, 256 };
float cb_range[] = { 0, 256 };
const float* ranges[] = { cr_range, cb_range };
calcHist(&ref_ycrcb, 1, channels, mask, hist, 2, histSize, ranges);
#if 1
Mat hist_norm;
normalize(hist, hist_norm, 0, 255, NORM_MINMAX, -1);
imshow("hist_norm", hist_norm);
#endif
Mat src, src_ycrcb;
src = imread("kids.png", IMREAD_COLOR);
cvtColor(src, src_ycrcb, COLOR_BGR2YCrCb);
Mat backproj;
calcBackProject(&src_ycrcb, 1, channels, hist, backproj, ranges, 1, true);
GaussianBlur(backproj, backproj, Size(), 1.0); //³ëÀÌÁîÁŠ°Å¿ë
backproj = backproj > 50; //³ëÀÌÁîÁŠ°Å¿ë
Mat dst = Mat::zeros(src.rows, src.cols, CV_8UC3);
src.copyTo(dst, backproj);
imshow("ref", ref);
imshow("mask", mask);
imshow("src", src);
imshow("backproj", backproj);
imshow("dst", dst);
waitKey();
return 0;
}결과영상

