23.11.14 (화) 39일차
영상 특징 검출과 표현
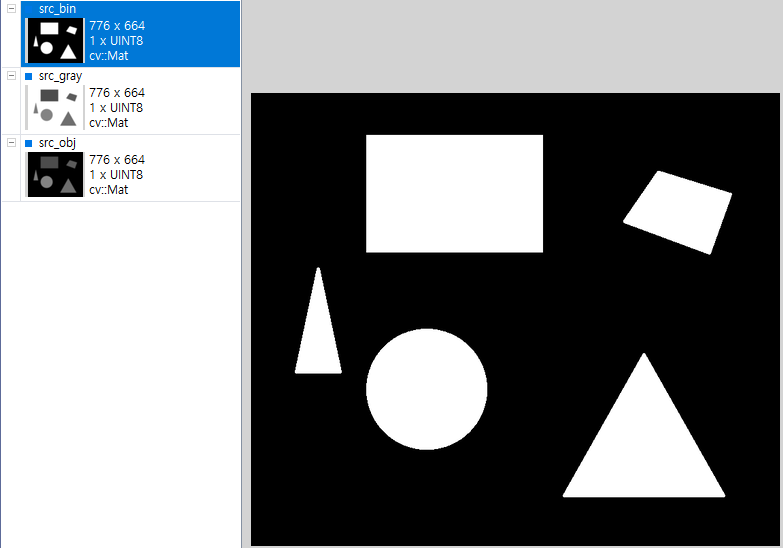
영상 이진화
// ISP_ShapeInfo.cpp
#pragma once
#include "ISP.h"
int main()
{
std::string fileName = "../KCCImageNet/shapes.jpg";
cv::Mat src_gray = cv::imread(fileName, cv::ImreadModes::IMREAD_GRAYSCALE);
uchar* pData = src_gray.data;
size_t width = src_gray.cols;
size_t height = src_gray.rows;
Mat src_bin = Mat::zeros(Size(width, height), CV_8UC1);
Mat src_obj = Mat::zeros(Size(width, height), CV_8UC1);
uchar* pDataBin = src_bin.data;
int threshold_min = 60; // 0 ~ 255
int threshold_max = 200;
// 이진화, Binary
for (size_t i = 0; i < width * height; i++)
{
int value = pData[i];
/*if (value > threshold_min && value < threshold_max)
pDataBin[i] = 0;
else
pDataBin[i] = 255;*/
(value > threshold_max) ? pDataBin[i] = 0 : pDataBin[i] = 255;
}
src_obj = src_bin & src_gray;
return 1;
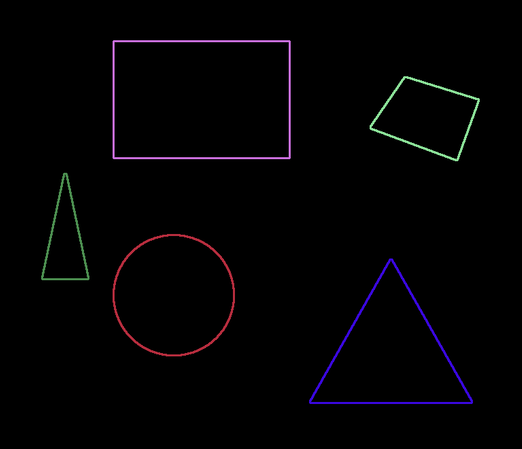
}윤곽선 검출
#pragma once
#include "ISP.h"
int main()
{
std::string fileName = "../KCCImageNet/shapes.jpg";
cv::Mat src_gray = cv::imread(fileName, cv::ImreadModes::IMREAD_GRAYSCALE);
uchar* pData = src_gray.data;
size_t width = src_gray.cols;
size_t height = src_gray.rows;
Mat src_bin = Mat::zeros(Size(width, height), CV_8UC1);
Mat src_obj = Mat::zeros(Size(width, height), CV_8UC1);
uchar* pDataBin = src_bin.data;
int threshold_min = 60; // 0 ~ 255
int threshold_max = 200;
// 이진화, Binary
for (size_t i = 0; i < width * height; i++)
{
int value = pData[i];
/*if (value > threshold_min && value < threshold_max)
pDataBin[i] = 0;
else
pDataBin[i] = 255;*/
(value > threshold_max) ? pDataBin[i] = 0 : pDataBin[i] = 255;
}
src_obj = src_bin & src_gray;
RNG rng(12345);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(src_bin, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE);
Mat drawing = Mat::zeros(src_bin.size(), CV_8UC3);
for (size_t i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 256), rng.uniform(0, 256), rng.uniform(0, 256));
drawContours(drawing, contours, (int)i, color, 2, LINE_8, hierarchy, 0);
}
return 1;
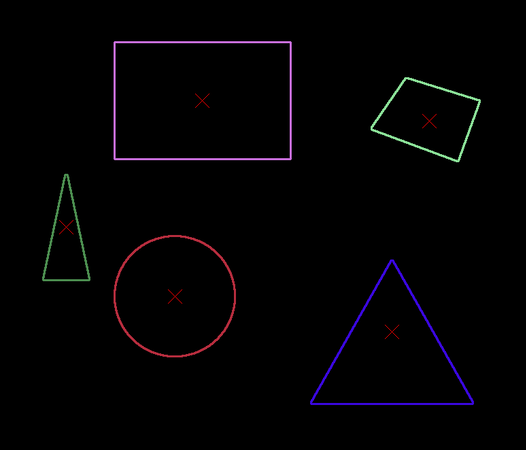
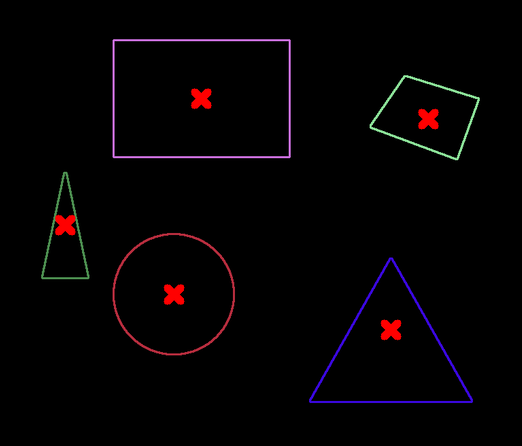
}CoG (무게중심) 찾기
#pragma once
#include "ISP.h"
int main()
{
std::string fileName = "../KCCImageNet/shapes.jpg";
cv::Mat src_gray = cv::imread(fileName, cv::ImreadModes::IMREAD_GRAYSCALE);
uchar* pData = src_gray.data;
size_t width = src_gray.cols;
size_t height = src_gray.rows;
Mat src_bin = Mat::zeros(Size(width, height), CV_8UC1);
Mat src_obj = Mat::zeros(Size(width, height), CV_8UC1);
uchar* pDataBin = src_bin.data;
int threshold_min = 60; // 0 ~ 255
int threshold_max = 200;
// 이진화, Binary
for (size_t i = 0; i < width * height; i++)
{
int value = pData[i];
/*if (value > threshold_min && value < threshold_max)
pDataBin[i] = 0;
else
pDataBin[i] = 255;*/
(value > threshold_max) ? pDataBin[i] = 0 : pDataBin[i] = 255;
}
src_obj = src_bin & src_gray;
RNG rng(12345);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(src_bin, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE);
Mat drawing = Mat::zeros(src_bin.size(), CV_8UC3);
for (size_t i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 256), rng.uniform(0, 256), rng.uniform(0, 256));
drawContours(drawing, contours, (int)i, color, 2, LINE_8, hierarchy, 0);
}
for (size_t i = 0; i < contours.size(); i++)
{
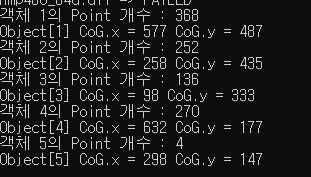
cout << "객체 " << i+1 << "의 Point 개수 : " << contours[i].size() << endl;
int CoGx, CoGy;
CoGx, CoGy = 0, 0;
int accX = 0, accY = 0;
int length = contours[i].size();
for (size_t n = 0; n < length; n++)
{
accX += contours[i].at(n).x;
accY += contours[i].at(n).y;
}
CoGx = accX / length;
CoGy = accY / length;
cout << "Object[" << i + 1 << "] CoG.x = " << CoGx << " CoG.y = " << CoGy << endl;
line(drawing, Point(CoGx - 10, CoGy - 10), Point(CoGx + 10, CoGy + 10), CV_RGB(255, 0, 0));
line(drawing, Point(CoGx + 10, CoGy - 10), Point(CoGx - 10, CoGy + 10), CV_RGB(255, 0, 0));
}
return 1;
}두껍게 라인을 그리고 싶다면 ..
line(drawing, Point(CoGx - 10, CoGy - 10), Point(CoGx + 10, CoGy + 10), CV_RGB(255, 0, 0), 10);
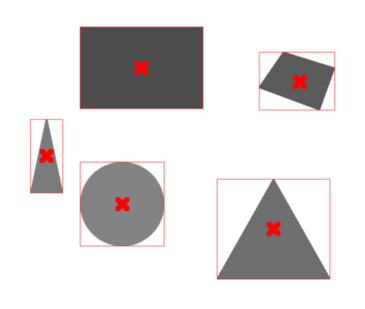
line(drawing, Point(CoGx + 10, CoGy - 10), Point(CoGx - 10, CoGy + 10), CV_RGB(255, 0, 0), 10);외곽 사각형 그리기
#pragma once
#include "ISP.h"
int main()
{
std::string fileName = "../KCCImageNet/shapes.jpg";
cv::Mat src_gray = cv::imread(fileName, cv::ImreadModes::IMREAD_GRAYSCALE);
uchar* pData = src_gray.data;
size_t width = src_gray.cols;
size_t height = src_gray.rows;
Mat src_bin = Mat::zeros(Size(width, height), CV_8UC1);
Mat src_obj = Mat::zeros(Size(width, height), CV_8UC1);
uchar* pDataBin = src_bin.data;
int threshold_min = 60; // 0 ~ 255
int threshold_max = 200;
// 이진화, Binary
for (size_t i = 0; i < width * height; i++)
{
int value = pData[i];
/*if (value > threshold_min && value < threshold_max)
pDataBin[i] = 0;
else
pDataBin[i] = 255;*/
(value > threshold_max) ? pDataBin[i] = 0 : pDataBin[i] = 255;
}
src_obj = src_bin & src_gray;
RNG rng(12345);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(src_bin, contours, hierarchy, RETR_TREE, CHAIN_APPROX_SIMPLE);
Mat drawing = Mat::zeros(src_bin.size(), CV_8UC3);
for (size_t i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 256), rng.uniform(0, 256), rng.uniform(0, 256));
drawContours(drawing, contours, (int)i, color, 2, LINE_8, hierarchy, 0);
}
Mat src_color;
cv::cvtColor(src_gray, src_color, ColorConversionCodes::COLOR_GRAY2BGR);
for (size_t i = 0; i < contours.size(); i++)
{
cout << "객체 " << i+1 << "의 Point 개수 : " << contours[i].size() << endl;
int CoGx, CoGy;
CoGx, CoGy = 0, 0;
int accX = 0, accY = 0;
int length = contours[i].size();
int x_min = width, x_max = 0, y_min = height, y_max = 0;
for (size_t n = 0; n < length; n++)
{
accX += contours[i].at(n).x;
accY += contours[i].at(n).y;
if (x_min > contours[i].at(n).x)
x_min = contours[i].at(n).x;
if (x_max < contours[i].at(n).x)
x_max = contours[i].at(n).x;
if (y_min > contours[i].at(n).y)
y_min = contours[i].at(n).y;
if (y_max < contours[i].at(n).y)
y_max = contours[i].at(n).y;
}
CoGx = accX / length;
CoGy = accY / length;
//cout << "Object[" << i + 1 << "] CoG.x = " << CoGx << " CoG.y = " << CoGy << endl;
line(drawing, Point(CoGx - 10, CoGy - 10), Point(CoGx + 10, CoGy + 10), CV_RGB(255, 0, 0), 10);
line(drawing, Point(CoGx + 10, CoGy - 10), Point(CoGx - 10, CoGy + 10), CV_RGB(255, 0, 0), 10);
line(src_color, Point(CoGx - 10, CoGy - 10), Point(CoGx + 10, CoGy + 10), CV_RGB(255, 0, 0), 10);
line(src_color, Point(CoGx + 10, CoGy - 10), Point(CoGx - 10, CoGy + 10), CV_RGB(255, 0, 0), 10);
const int ptSz = 4;
Point pt[ptSz];
pt[0].x = x_min; pt[0].y = y_min;
pt[1].x = x_max; pt[1].y = y_min;
pt[2].x = x_max; pt[2].y = y_max;
pt[3].x = x_min; pt[3].y = y_max;
for (size_t i = 0; i < ptSz; i++)
{
line(src_color, pt[i % ptSz], pt[(i + 1) % ptSz], CV_RGB(255, 0, 0));
}
}
return 1;
}OpenCV 라이브러리 활용 코드
double area = contourArea(contours[i]);
RotatedRect rrt = minAreaRect(contours[i]);
double length = arcLength(contours[i], true);
I mean