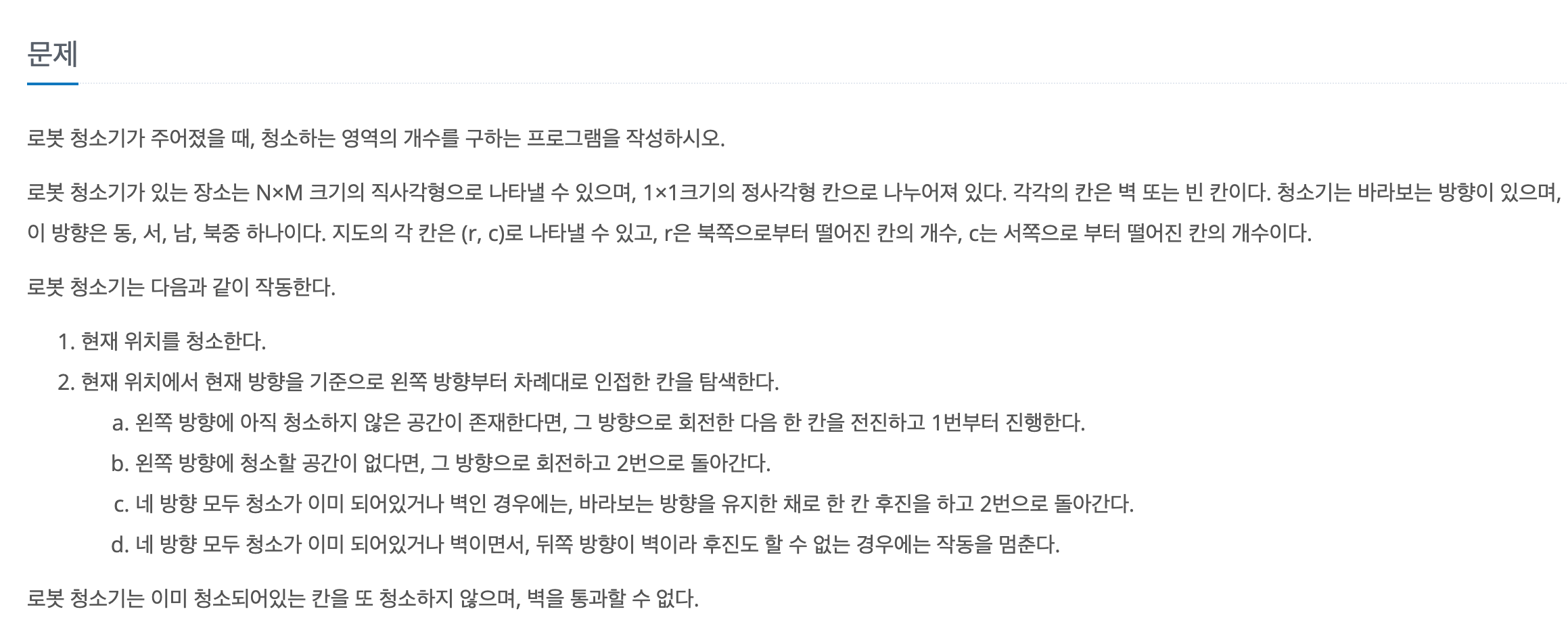
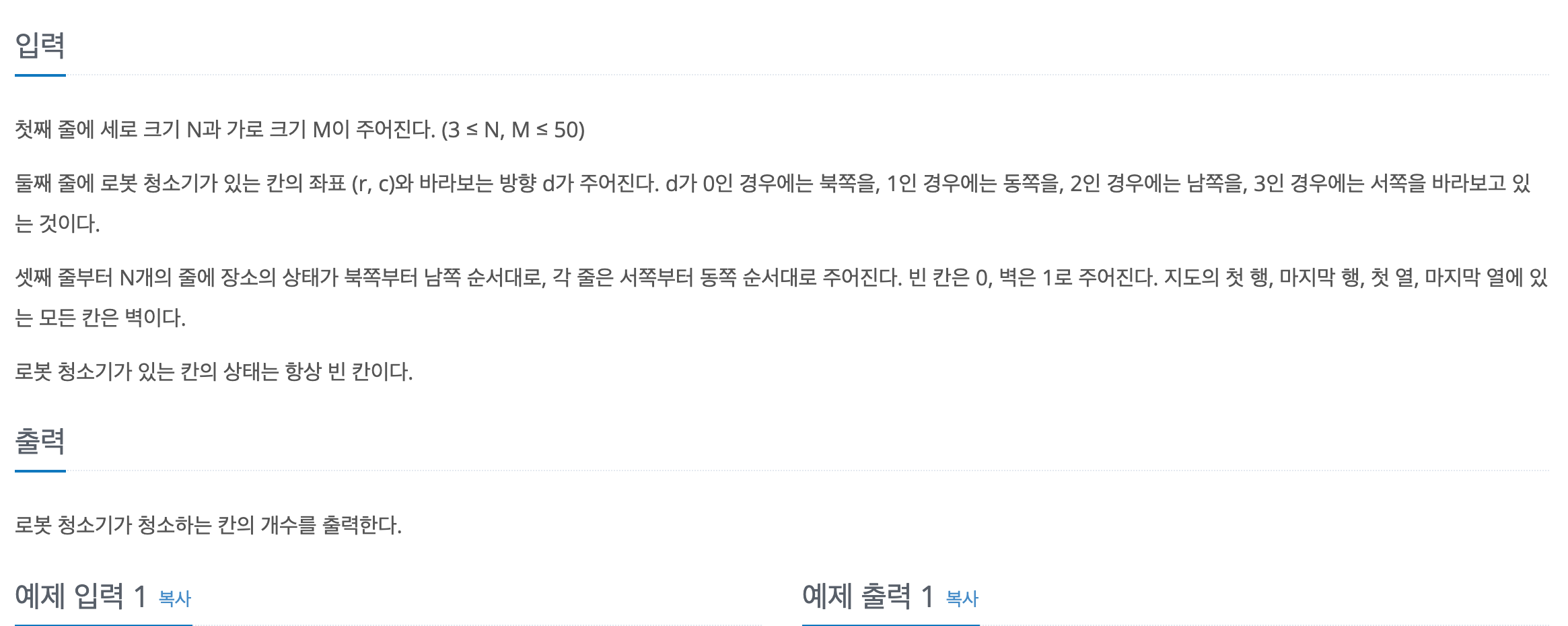
구현
전형적인 시뮬레이션 문제이다 삼성전자 공채 코딩 테스트에서 자주 출제되는 대표적인 유형이라 반복해서 풀 것
구현 문제이기 때문에 코드로 설명하겠다.
import sys
input = sys.stdin.readline
n, m = map(int, input().split())
# 현재 청소기의 좌표와 바라보는 방향 입력
r, c , direction = map(int, input().split())
graph = []
# 전체 맵 입력받기
for i in range(n):
graph.append(list(map(int, input().split())))
# 방문한 위치를 저장하기 위한 맵을 생성하여 0으로 초기화
visited = [[False]*m for _ in range(n)]
visited[r][c] = True # 현재 좌표 방문 처리
# 북, 동, 남, 서 정의
dx = [-1, 0, 1, 0]
dy = [0, 1, 0, -1]
#왼쪽으로 회전
def turn_left():
global direction
direction -= 1
if direction == -1:
direction = 3
turn_time = 0
cnt = 1
#시뮬레이션 시작
while True:
#왼쪽으로 회전
turn_left()
nx = r + dx[direction]
ny = c + dy[direction]
#회전한 이후 가보지 않은 칸이 있으면 이동
if graph[nx][ny] == 0 and not visited[nx][ny]:
visited[nx][ny] = True
r = nx
c = ny
cnt += 1
turn_time = 0
continue
#회전 이후 정면에 가보지 않은 칸이 없거나 벽일 경우
else:
turn_time += 1
#네 방향 모두 갈 수 없는 경우
if turn_time == 4:
nx = r - dx[direction]
ny = c - dy[direction]
# 뒤로 갈 수 있다면 이동
if graph[nx][ny] == 0:
visited[nx][ny] = True
r = nx
c = ny
#뒤로 못가면 멈춤
else:
break
# 회전 횟수 초기화
turn_time = 0
#정답 출력
print(cnt)
배우고 적용하고 개선하기