- dynamics model은 로봇의 움직임과 행동을 예측하고 제어하는 데 사용되는 수학적 모델
1. Holonomic Model (홀로노믹 모델)
- 홀로노믹 모델은
로봇이 모든 방향으로 자유롭게 움직일 수 있는 경우 - 이 모델에서 로봇은
병진 운동(직선 운동)과 회전 운동을 독립적으로 수행할 수 있음, 모든 방향으로 즉시 이동하거나 회전할 수 있습니다.측면 이동 및 대각선 이동도 할 수 있습니다.
- 예를 들어, 옴니 휠(Omni-wheel)이나 메카넘 휠(Mecanum wheel)을 사용하는 로봇은 홀로노믹 모델을 따릅니다.
- 이들 휠은 로봇이 수평 방향으로 자유롭게 움직이면서도 회전할 수 있는 능력을 제공합니다.
- 홀로노믹 로봇은 복잡한 환경에서의 정밀한 위치 조정이나 조작 작업에 적합합니다.
1-1. Omni-wheel

- 구조와 특징:
- 옴니 휠은 주 바퀴 주위에 여러 개의 작은 롤러가 장착된 바퀴
- 이 작은 롤러들은 주 바퀴의 회전 축과 수직 방향으로 회전
- 이 구조 덕분에, 로봇은 전후진뿐만 아니라, 수평 방향으로도 자유롭게 움직일 수 있음
- 이동성:
- 옴니 휠을 사용하는 로봇은 전후좌우로 움직일 수 있으며, 제자리에서 회전도 가능
- 비교
- 옴니 휠은 간단한 수평 이동에 적합하며, 좁은 공간에서의 민첩한 움직임을 요구할 때 유용
2-2. Mecanum wheel
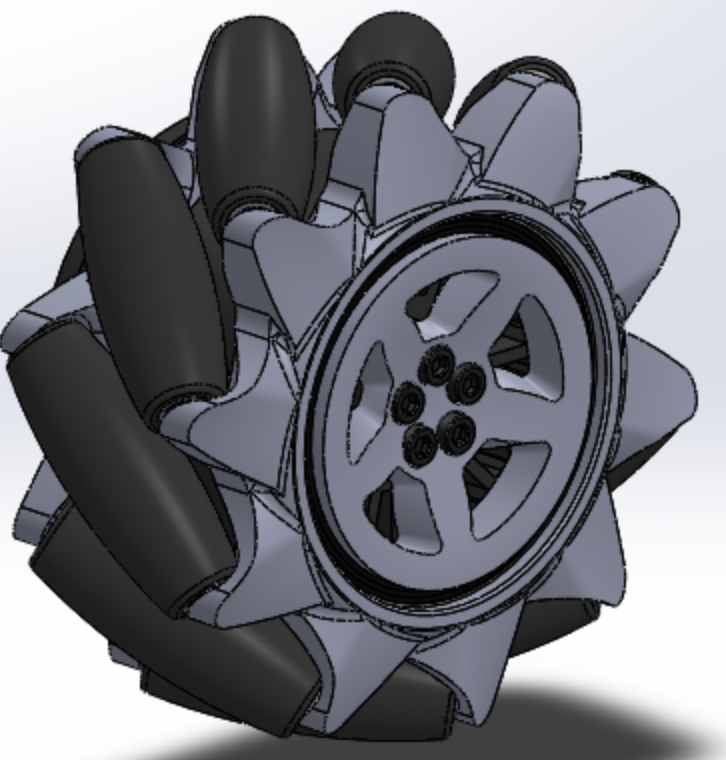
- 구조와 특징:
- 메카넘 휠은 표면에 대각선으로 배치된 여러 개의 롤러가 있는 바퀴
- 이 롤러들은 바퀴의 회전 축과 약 45도 각도로 배치되어 있음
- 이러한 구조는 로봇이 모든 방향으로 움직일 수 있게 해줌
- 이동성:
- 메카넘 휠을 사용하는 로봇은 옴니 휠과 마찬가지로 전후좌우 및 대각선 방향으로 이동할 수 있음
- 이 휠은 특히 로봇이 대각선 방향으로 부드럽게 이동하거나, 복잡한 경로를 따라 이동할 때 유용
- 비교:
- 메카넘 휠은 특히 대각선 이동에 더 유리
- 복잡한 이동 패턴을 가능하게 하며, 로봇이 보다 다양한 방향으로 움직이는 것을 요구하는 응용 분야에 적합
2. Differential Drive Model (차동 구동 모델)
- 개념: 차동 구동 모델은 로봇에
두 개의 병렬 바퀴가 있는 구조를 기반으로 합니다. 이두 바퀴는 각각 독립적으로 구동될 수 있으며, 이를 통해 로봇은 앞으로 진행하거나, 회전하거나, 또는 이 두 움직임을 조합할 수 있습니다. - 이 모델은
측면 이동이 불가능합니다 (즉, 로봇은 직접 옆으로 움직일 수 없습니다). - 동작 메커니즘: 두 바퀴의 속도 차이를 조절함으로써 로봇은 제자리에서 회전할 수 있고, 두 바퀴가 동일한 속도로 움직이면 직선으로 이동합니다.
- 수학적 모델링: 로봇의 위치와 방향은 로봇의 바퀴 속도와 그 간의 거리에 따라 결정됩니다. 이 모델은 주로 비선형 시스템 방정식을 사용하여 표현됩니다.
3. Car-like Model (자동차 유사 모델)
- 개념: 자동차 유사 모델은 실제 자동차의 운전 메커니즘을 모방하여 설계된 로봇 모델입니다. 주로
전륜 조향 방식 - 이 모델에서는 오직 앞바퀴만이 조향됩니다.
뒷바퀴는 고정되어 있으며 직선 운동만을 합니다. 운전자가 핸들을 돌리면 앞바퀴의 방향이 바뀌고, 차량은 이에 따라 방향을 변경합니다.- 동작 메커니즘: 이 모델에서 로봇(또는 자동차)의 방향은 전륜의 조향각에 의해 결정되며, 후륜은 주로 추진력을 제공합니다.
- 수학적 모델링: 이 모델은 차량의 위치, 방향, 속도, 조향각 등 다양한 변수를 고려하여 복잡한 비선형 방정식을 통해 표현됩니다. 경로 계획과 추종에서 중요한 역할을 합니다.
4. Double Ackermann Model (더블 애크만 모델)
전통적인 자동차의 스티어링 메커니즘을 기반두 개의 애크만 스티어링 시스템을 사용- 주로
네 바퀴가 모두 조향 가능한 로봇이나 차량에 적용
- 주로
각 바퀴 세트(앞바퀴와 뒷바퀴)는 독립적으로 조향- 이를 통해 차량은 더 나은 기동성과 조정 능력을 가질 수 있음

새로운 것이 들어오면 이미 있는 것과 충돌을 시도하라.