[Paper Review] Temporal Difference Learning of N-Tuple Networks for the Game 2048
reinforcement learning
다음 논문에 대한 포스팅입니다.
Szubert, Marcin, and Wojciech Jaśkowski. "Temporal difference learning of n-tuple networks for the game 2048." 2014 IEEE Conference on Computational Intelligence and Games. IEEE, 2014.
Introduction
2048 게임은 Gabriele Cirulli가 제작한 유명한 비디오 게임으로, 한 때 인터넷과 모바일에서 선풍적인 인기를 휩쓴 게임이다.
2048은 아래 그림과 같은 4x4 게임판에서 상하좌우 네 방향으로 타일을 슬라이드할 수 있으며, 같은 숫자의 타일을 합쳐 높은 숫자의 타일을 만들어내는 것을 목표로 한다.
2048은 easy-to-learn, hard-to-master의 속성을 가진 대표적인 게임으로, 인공지능 기술의 적용에 적합하다고 볼 수 있다.
2048의 기존 solver들은 트리 서치 기반이거나 휴리스틱으로, 본 논문에서는 Q-Learning, TD-state, 그리고 TD-afterstate라는 이름의 세 가지 학습 방법과 n-tuple network를 이용한 가치 함수 근사 방법을 통해 2048의 인공지능 solver를 고안했다.
Game 2048
앞서 설명과 같이 2048은 Single-player, non-deterministic, perfect information video game이라고 한다. 4x4 보드의 각 타일은 빈 타일(empty tile) 혹은 v-tile로 구성될 수 있는데, 여기서 v는 2의 거듭제곱으로 에 해당한다.
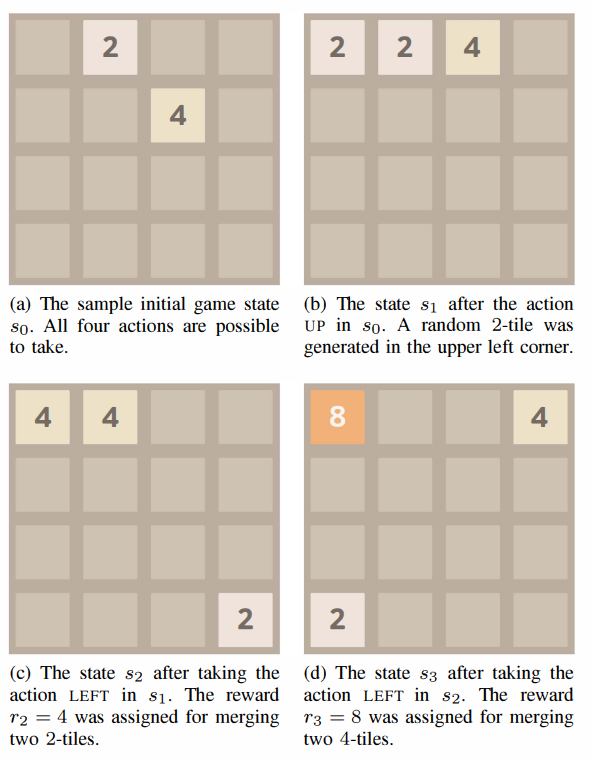
게임 시작 시 두 개의 빈 타일이 아닌 무작위 타일과 함께 시작한다.
무작위 타일은, 2-타일 혹은 4-타일이며, 빈 타일이 있던 위치 중 아무 곳에서나 무작위로 생성된다. (Fig.1-(a) 참조)
이후 상,하,좌,우 네 방향으로 타일들을 슬라이딩하여 같은 종류의 두 타일을 합쳐 새로운 (더 큰 숫자의) 타일을 만들 수 있다. (Fig.1-(b)~(d) 참조)
게임의 목표는 최대한 오래 게임을 지속시키면서 높은 점수를 얻는 것이다. 이와는 별개로 2048-타일을 만들어냈다면 그 게임은 이긴 것으로 간주한다.
Methods
A. Markov Decision Process
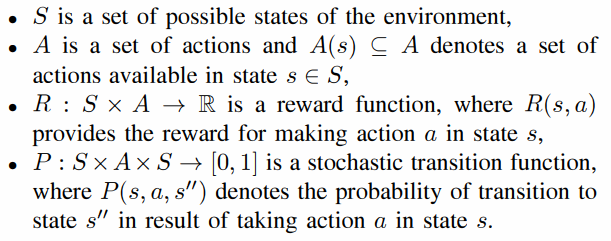
마르코프 의사결정 과정, 즉 MDP는 상태 S, 행동 A, 보상 R, 상태전이확률 P로 구성된 control 과정을 의미한다. 에이전트가 특정 상태에서 행동을 취했을 때 P의 확률로 다음 상태로 넘어가며, 이와 해당 다음 상태의 보상을 얻게 되는 프로세스이다.
본 환경에서 에이전트의 목적은 의사 결정(행동 선택)의 기준이 되는 정책 를 학습하는 것이다. 또 한가지 짚고 넘어가야 할 점은, 2048은 non-deterministic 환경으로, 이는 특정 행동을 취했을 때 무작위 타일이 생성되기 때문이다.
B. Temporal Difference Learning
TD는 매 time-step마다 value function을 업데이트하는 데 강점이 있는 강화학습의 큰 줄기 중 하나이다. 혹시 TD에 대해 잘 모르는 분은 검색을 통해 자세히 알아보고 오시기를 바람.
일반적인 TD(0)의 update rule은 다음과 같다.
란 상태 에서의 상태 가치(state value), 장기적 보상(long-term reward) 혹은 효용성(utility)에 해당하는데, 행동에 따른 즉각적 보상 과 대비된다.
위 수식에서 error에 해당하는 를 TD error라고 부르며, 현재까지 계산된 와 현재 행동을 취해 얻어진 다음 상태 가치 사이의 차이에 해당한다.
는 학습률이다.
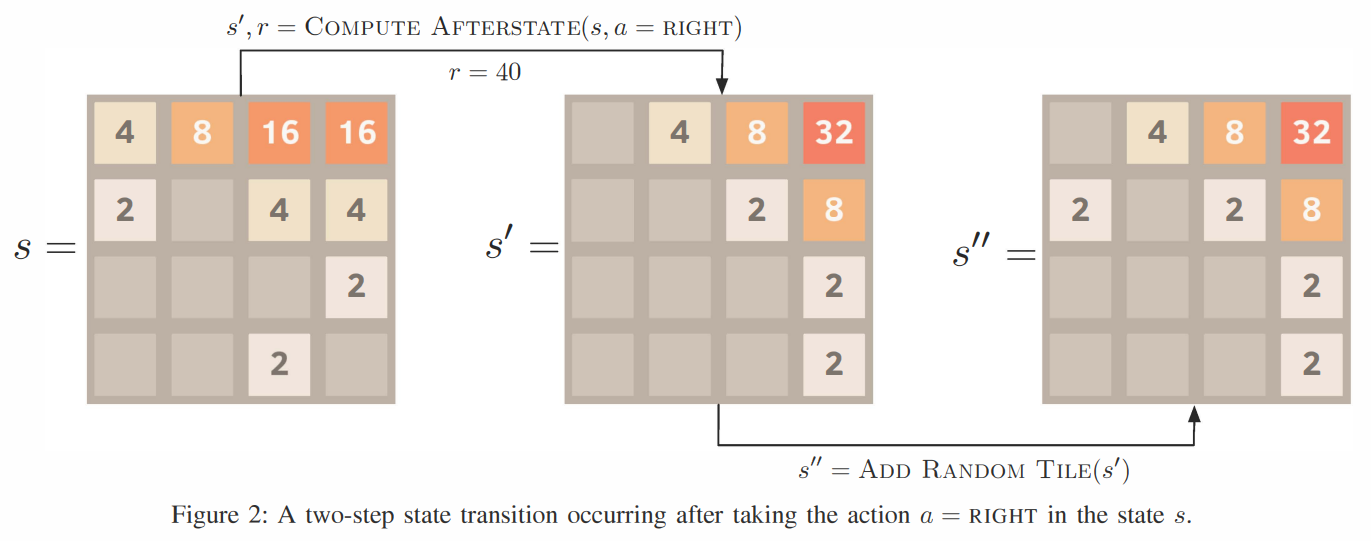
여기서 왜 가 아닌 로 표기되었는지 의아해할 수 있는데, 본 논문에서는 2048 게임의 특성을 고려하여 상태 전이 단계를 두 단계로 세분화했다. (Fig.2 참조)
1. 초기상태()에서 타일 이동 후 상태 (,논문에서는 Afterstate라고 정의함)
2. Afterstate()에서 랜덤 타일이 추가된 다음 상태()
C. Learning Game-Playing Policies
먼저 전체적인 게임플레이 및 학습 과정을 살펴보자.
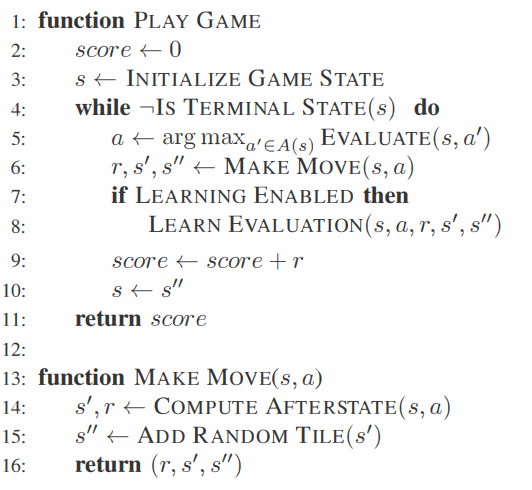
PlayGame
누적 보상 score와 초기상태 s를 초기화하고, Terminal state에 도달할 때 까지 iteration을 반복한다.
Evaluate 함수를 호출하여 특정 상태-행동 pair에 대한 가치 함수를 계산한 뒤 가장 높은 가치 함수를 갖는 행동 a를 선택, MakeMove함수를 호출해 다음 상태로 전이한다.
만약 학습과정이라면 LearnEvaluation 함수를 통해 학습을 진행한다.
이 때 가장 중요한 Evaluate 함수를 본 논문에서는 Introduction에서 언급했듯이 세 가지 방법으로 구현하고 있다.
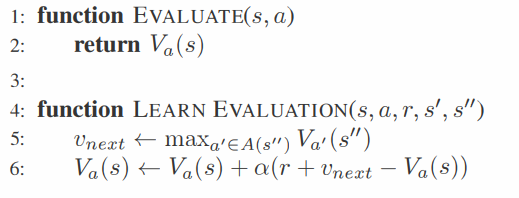
1) Evaluating actions (Q-Learning)
action value function 를 이용한다. 이 방법에서 에이전트의 policy는 다음과 같다.
본 논문에서는 상태-행동 pair에 대한 대신, 네 가지 행동(상/하/좌/우) 각각을 선택했을 때에 대한 를 정의해 사용한다.
2) Evaluating states (TD-State)
상태 가치 계산을 위해서는 환경에 대한 정보, 즉 보상 R과 상태전이확률 P에 대해 알고 있어야 한다. 먼저 policy는 다음과 같다.
state evaluation function과 update rule은 다음과 같다.
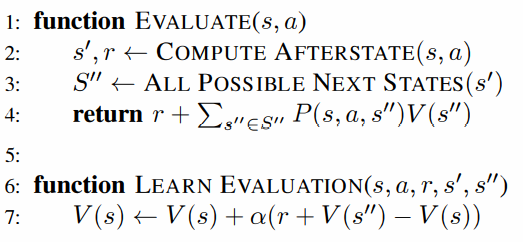
행동가치의 계산에 비해 상태가치 계산을 위해서는 가능한 모든 다음 상태에 대해 고려해야 한다. 2048의 경우 한번의 행동 이후 15 2 = 30가지의 서로 다른 상태로 전이할 수 있는데, 이는 afterstate에 최대 15개의 빈 타일이 만들어질 수 있고, 이 빈 타일에 두개의 서로 다른 랜덤 타일이 생성되기 때문이다.
따라서 1)의 경우보다 계산이 느리고 많은 메모리 용량을 차지한다는 단점이 있다.
3) Evaluating afterstates (TD-Afterstate)
한 행동에 의해 만들어지는 afterstate는 deterministic하게 하나만 존재하므로, TD-State보다 훨씬 빠르다. 이 경우 에이전트의 policy는 다음과 같다.
는 상태 에서 행동 를 취했을 때 이어지는 afterstate 로의 mapping이다.
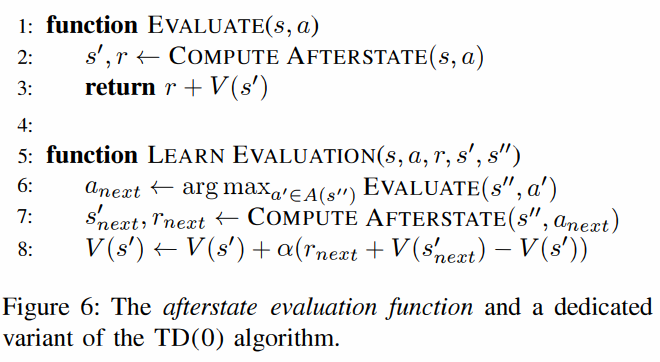
학습 과정을 살펴보면, 특정 상태에서 어떤 행동을 했을 때 계산되는 afterstate value값을 최대로 하는 행동 a_next를 선택하여 취한다. 그렇게 전이되어 나오는 afterstate s'_next와 r_next를 이용해 afterstate value V(s')를 업데이트하는 방식이다.
D. N-tuple Network Evaluation Function
작은 상태 공간의 경우, look-up table과 같은 형태로 모든 V값을 저장하고 바로 참조하여 사용할 수 있다. 그러나 2048의 경우 개의 가능한 상태가 존재한다. (빈타일~-타일, 보드 크기 4x4)
따라서 모든 상태에 대한 개별적인 V값을 저장해두는 것은 불가능하고, V값을 근사하기 위한 파라미터화된 함수 (신경망)이 필요한데, 그것이 바로 n-tuple network이다. n-tuple network는 이미 Othello, Connect 4와 같은 게임에서 좋은 성적을 거둔 바가 있다.
n-tuple network는 개의 -tuple들로 이루어져 있다. 여기서 n는 튜플의 크기가 되겠다. 에 대해 i번째 n-tuple은 look-up table 와 보드 위의 위치에 해당하는 로 구성된다. LUT는 각각의 보드 패턴 sequence 에 대한 가중치(weight) 파라미터를 저장하고 있다.
n-tuple network를 함수 에 대한 수식으로 다음 그림과 같이 나타낼 수 있다.
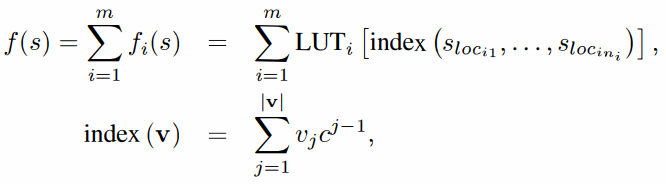
이 때 는 보드 위의 한 위치인 에서의 값(타일의 값)을 의미하는데, 타일 값은 빈 타일은 0, 값이 있는 -타일은 로 나타낸다. (e.g. 128-타일은 7로 인코딩됨)
는 타일 값들을 담고 있는 벡터로, 각각의 원소 는 인데, 는 가능한 타일값들의 개수를 나타낸다.
2048게임에서는 최대 -타일이 가능하므로 c는 18에 해당하나, 본 논문에서는 weight 개수를 제한하기 위하여 c=15로 설정했다.
다음 그림과 함께 예시를 들어보겠다.
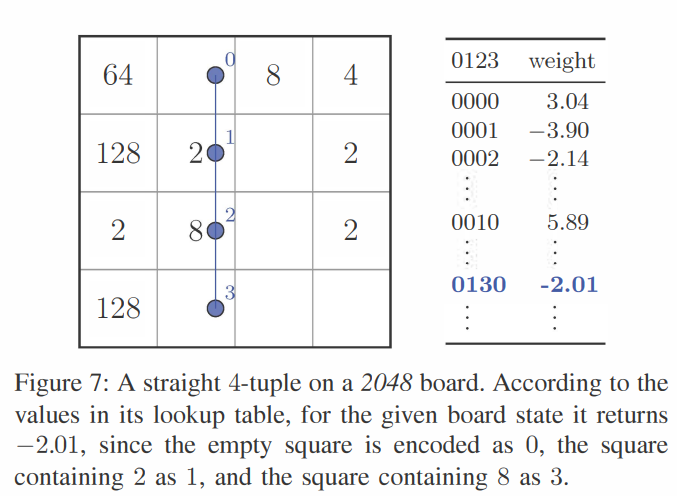
위 그림과 같은 보드 상황에서, 4-튜플의 weight값은 (단, m=1일 때)
의 과정으로 weight를 참조한다.
Comparison of the Learning Methods
Q-Learning, TD-State, TD-Afterstate 세 가지 방법 간의 성능 비교 실험
A. Experimental Setup
1) N-tuple network architecture
n-tuple network의 디자인에 있어서 고려해야 할 중요한 사항 중 하나는 게임 보드 위에서의 개별 n-tuple들의 위치라고 한다. 반드시 그래야 하는 것은 공간적인 특성을 반영하기 위해 연속적인 위치에 튜플을 올려놓는 것이 좋다고 한다.
2048에서는 한 개의 n-tuple은 개의 weights를 지닌다. (c=15이기 때문에) 따라서 본 실험에서는 그나마 manageable한 숫자로서 n=4를 선택했다. 4개의 수평 튜플, 4개의 수직 튜플, 9개의 사각형모양 튜플로 총합 17개의 4-튜플로 network를 구성했다. (Fig. 8 참조) 따라서 weight의 수는 개이다.
2) Learning algorithms
- Q-Learning : 상,하,좌,우 네 가지 행동에 대한 개별적인 n-tuple network를 사용해 value function($V_{up},V_{down},V_{left},V_{right})$을 근사한다. update rule은 물론 Fig.4의 Q-learning 방법을 따른다.
- TD-State : 한 행동으로부터 만들어질 수 있는 모든 경우의 상태에 대해 V를 계산한다. 상태전이확률과 reward function에 대한 사전 정보를 필요로한다. Fig.5의 TD(0) update를 따라 학습한다.
- TD-Afterstate : 한 행동으로부터 만들어지는 deterministic한 afterstate value를 계산한다. 마찬가지로 Fig.6의 update rule에 따르며, afterstate 계산을 위한 게임 모델을 필요로 한다.
위 세 가지 방법 모두 어떤 행동이 이루어진 후에 학습이 진행되며, n-tuple network()를 이용해 value function을 근사한다.
3) Performance measures
- Winning rate : 1000번의 게임 플레이 중 2048-타일을 만들어낸 횟수(비율)
- Total score : 1000번의 게임 플레이 중 얻어낸 총 점수의 평균
- Learning time : 에이전트 학습에 소요된 시간
B. Results
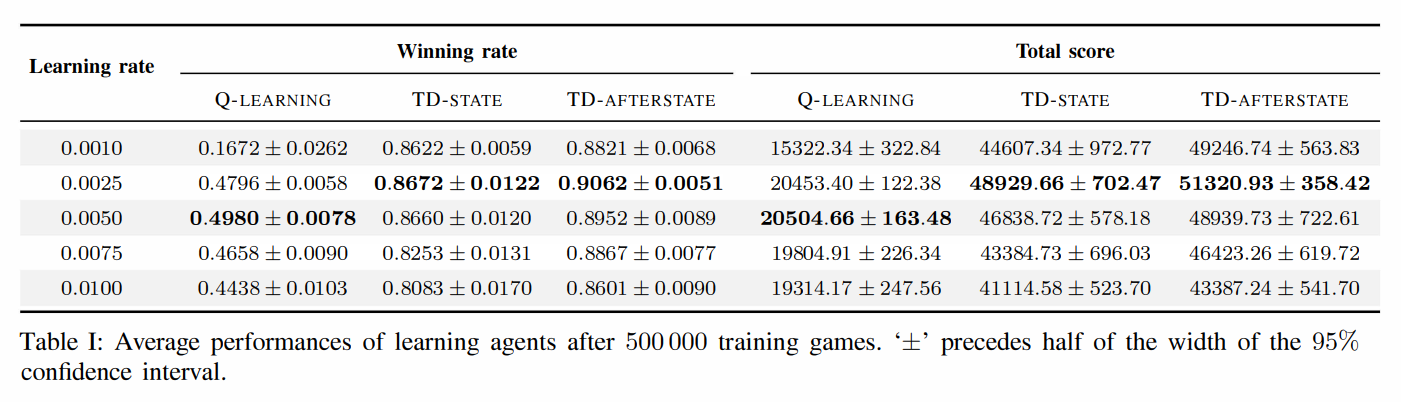
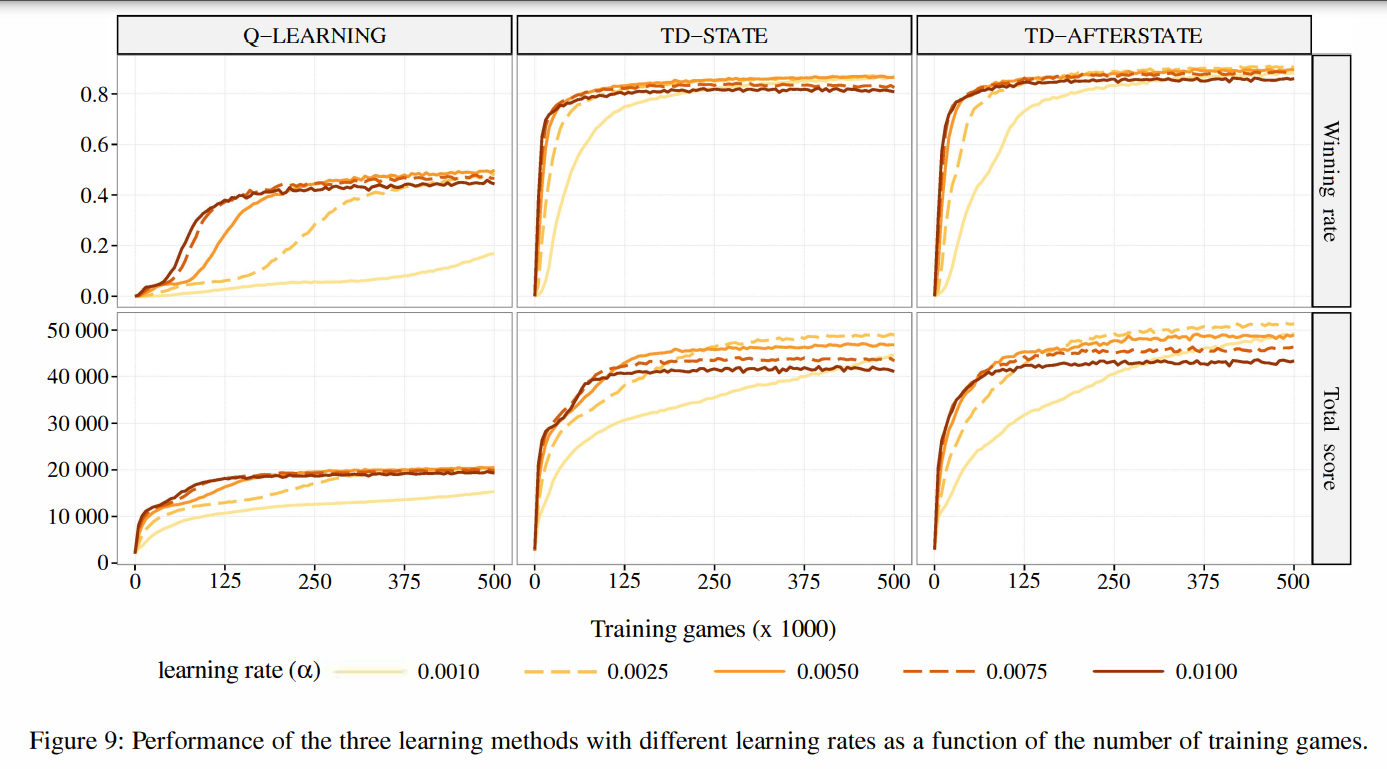
TD-State와 TD-Afterstate가 Q-Learning에 비해 훨씬 좋은 성적을 냈다. 둘 사이의 차이가 근소하긴 하지만, TD-Afterstate의 학습 속도가 현저히 빨랐다고 한다.
Improving the Winning Rate
간단하게만 소개하자면, computational resource를 좀더 늘리고 성능을 극대화한 실험이다.
이전 실험에서 가장 좋은 성적을 냈던 TD-Afterstate ()를 사용했고, 2개의 직선형 4-tuple, 2개의 직사각형 6-tuple을 사용하여 개의 weights로 이전 실험에 비해 훨씬 많은 weight를 사용해 network를 구성했다.
또한 symmetric sampling 기법을 사용하여 게임 보드의 대칭성을 활용하여 성능을 높였다고 하는데, 보드의 rotation과 reflection을 통해 한 튜플당 8개의 값을 얻어낼 수 있다.
이게 무슨 말이냐면, 현재 보드에 회전, 반전 등의 Affine 변환을 가한 뒤 변환된 보드 위에 N Tuple Networks를 덧대어 Value값을 계산했다는 것이다. 더 적은 N Tuple들로 일종의 일반화 성능을 올리고자 하는 휴리스틱인 듯 하다.
실험 결과 winning rate 97.0%, total score 99,916 1290를 기록했다고 한다.
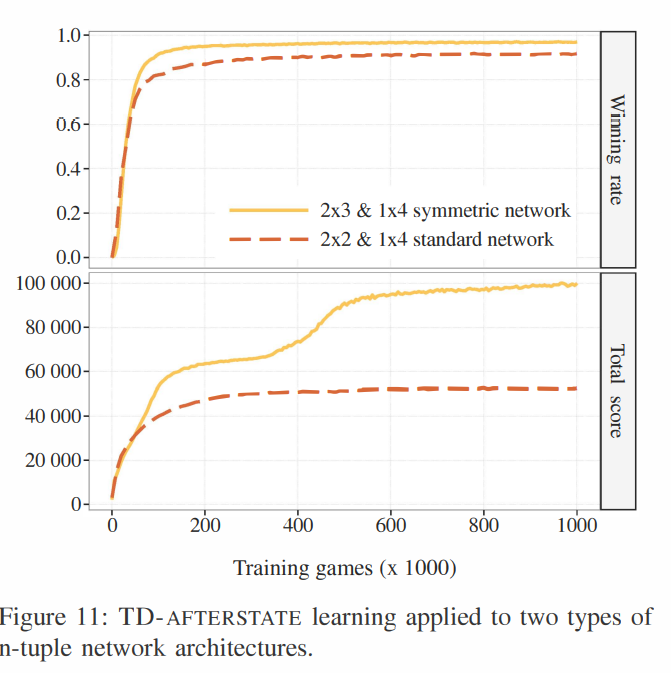
Fig. 11에는 본 실험의 학습 곡선이 나와 있는데, 약 350,000 games에서 total score가 정체되는 구간이 발생한다.
저자들의 설명에 의하면, 저 구간 전까지는 -타일 미만의 타일만 만들어내다가, 저 구간부터 어찌어찌해서 16,384-타일 이상의 타일들을 생성하는 요령을 에이전트가 알아내어 평균 total score가 상승하게 된 것이라고 한다.
Discussion
A. Winning Rate vs. Total Score
따라서 Fig.11의 실험 결과를 살펴보면, winning rate는 거의 동일한 값을 유지하는데 total score만 높아지는 부분을 확인할 수 있다. 이는 에이전트가 winning rate, 즉 2048-타일의 생성이 아닌 최대한 높은 점수(total score)를 얻는 것을 목표로 학습을 진행했기 때문이라고 논문의 저자들은 보고 있다.
B. Comparison with Search-Based Agents
Introduction에서 언급했듯이, 2048의 기존 알고리즘들은 트리 서치 기반의 알고리즘이었다.
- 첫번째 방법은 Minimax game tree search + pruning 방법으로, winning rate 89%로 본 연구에 비해 현저히 낮다.
- 두번째는 Minimax의 변종인 Expectimax (depth limit of 8 moves)로, winning rate 100%에 달하지만 이는 고작 100개의 게임에서 측정된 결과이므로 overestimated되었을 가능성이 높다. 속도를 비교하자면, C언어로 짜여진 효율적인 implementation에서도 평균 6.6 move/seconds의 실행 속도를 보여주는데, 이는 본 연구의 solver가 330,000moves/seconds를 보이는 것에 비하면 50,000배나 느린 속도라고 한다.
위 비교 결과는 학습기반 알고리즘과 탐색기반 알고리즘 간의 trade-off를 여실히 보여준다.
전자는 적은 computational power를 사용하지만 evaluation function을 저장하기 위한 많은 메모리를 필요로 하고, 후자는 적은 메모리를 사용하지만 연산량의 문제가 있다.
C. Lack of Exploration
마지막으로 본 논문의 저자들은 와 같은 explicit한 exploration 방법을 채택하지 않았다는 점을 지적했는데, 이는 랜덤 타일이 생성되는 2048 게임 환경의 특성상 충분히 stochastic하고 diversified되었기 때문이라고 한다.
