Sensor
물리적인 상태를 기계가 이해할 수 있게 정량화, 수치화해서 변환해 줄수 있는 것.
스마트폰은 센서의 집합체이다. (GPS 카메라 NFC 등등)
Accelerometer 가속도 센서
속도의 변화량(가속도)을 측정할 수 있는 센서.
만보계, 지진탐지등에 이용됨.
관성, 스프링을 이용해 힘이 어느방향으로 가해지느냐를 측정해 가속도를 알 수 있지만, 실제로는 용수철을 사용하지는 않는다.
Gyroscope 자이로스코프 센서
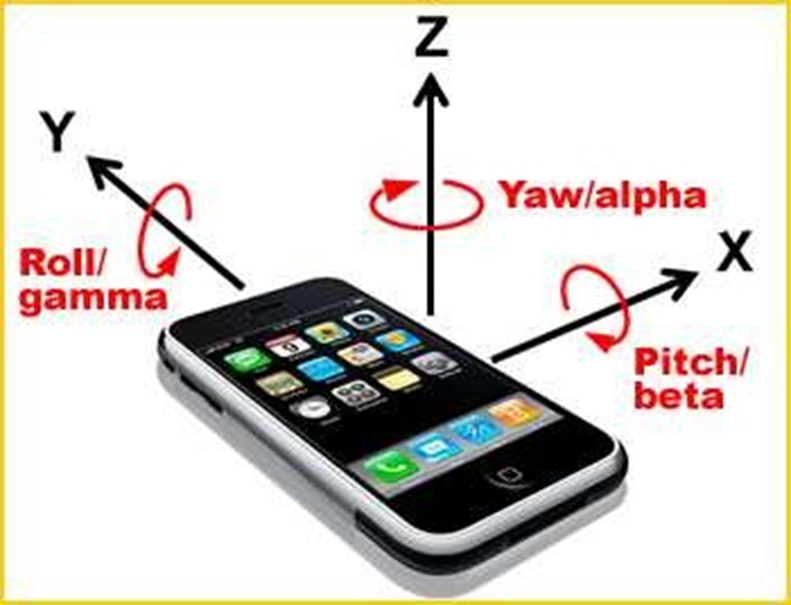
회전을 감지하는 센서.
운동하는 물체들에는 Accelerometer와 함께 반드시 들어가는 센서중 하나.
X, Y, Z축으로 회전하는 양을 수치화 시켜서 나타낸다.
이때 각각 PITCH ROLL YAW라고 한다.
ex) 자동차가 직진을 할때 좌우로 흔들리면 ROLL
자동차가 급출발 / 급정거시 앞뒤로 쏠리는 경우는 PITCH
자동차가 드래프트로 코너링할때 회전하는것은 YAW
Magnetometer 지자기 센서
자력을 측정 할 수 있는센서.
나침반에서 사용한다.
9-axis IMU(Inertial Measurement Unit)
위 센서 세개가 같이 활용되는 경우가 상당히 많고 특히, 이 세개의 센서를 하나의 통합 칩(IMU)으로 만들어서 사용하는 경우가 많다. 각각의 센서별로 3개의 축이 필요하므로 IMU는 총 9개의 축이 필요하다. 따라서 이 통합칩을 9-axis IMU라고 부른다.
Working with Low-cost Sensors
센서로 들어오는 값을 이용해서 스마트한 서비스적으로 활용을 한다.
이때 센서가 무조건 정확한 값을 전해준다면 이값을 그대로 사용만 하면 된다. 하지만 실제로는 센서의 가격이 너무 비싸거나 오류가 발생하는 등 일어나기 힘든일이다.
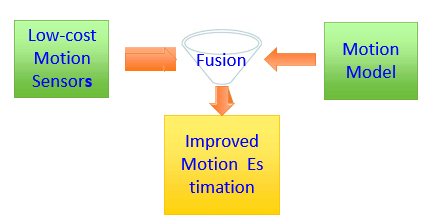
기본적으로 센서는 태생적으로 에러가 내장되어있으므로 어느정도의 에러는 내가 감안해서 사용을 해야한다라는 생각을 해야한다.
그래서 위 그림과 같이 Low-cost한 센서를 사용하고, 이것들의 값을 잘 fusion해서 사용하는 모델을 사용한다.
Fusion
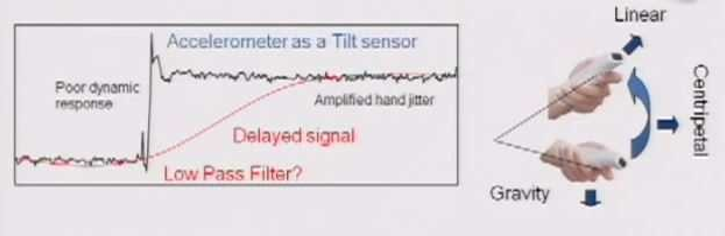
Tilt sensor를 예로 들면, 의도해서 센서를 기울이지 않았음에도 여러가지 이유(손의 떨림 등)로 인해 일정한 값이 나오지않고 계속 값이 바뀌면서 존재하는데 이것을 short term noise라고 한다. 이때 noise는 high frequency이고, 이것을 Low-pass filter에 통과시키면 주파수가 낮은 파장만 지나가게 되므로 noise가 걸러지게 된다. 이렇게 자신에게 필요한 값만 사용하기 위해 filter를 사용한다.
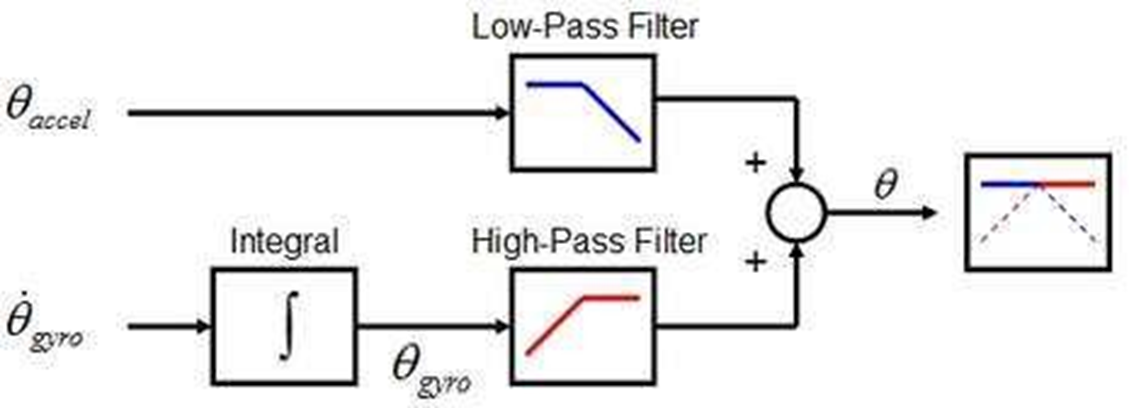
위사진을 보면 어떻게 센서들의 값이 사용되었나를 판단할 수 있어야 한다.
=> Acceleroment 센서를 통해 들어오는 값을 Low-paas filter를 사용해 short term noise들을 걸러주었고, Gyroscope 센서를 통해 들어오는 값을 integral한뒤 High-pass filter를 사용해 long term noise들을 걸러주었다. 그래서 나오는 측정값의 결과물을 Fusion해서 사용한다.
