목차
1. CPU 구조
- 레지스터
- 연산 장치
- 제어 장치
- 캐시
2. CPU 작동 원리
- CPU 연산 과정
- 명령어 체계
- 어셈블리어
- CPU 시뮬레이터
3. 성능 최적화
- 캐시 메모리
- CPU 파이프라인
- 분기 예측
1. CPU 구조
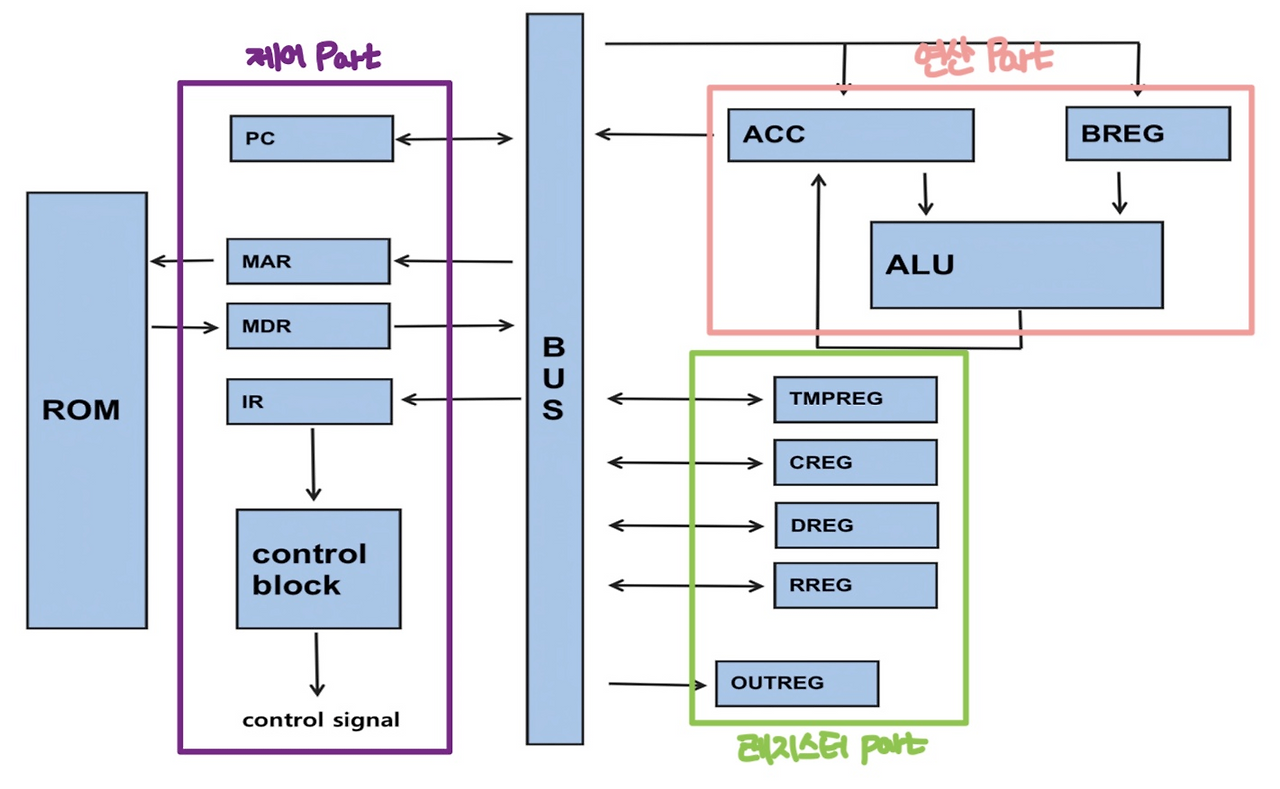
레지스터
- PC (Program Counter): CPU가 다음에 실행할 명령어의 주소를 가리키는 Register.
- MAR (Memory Address Register): 메모리에서 읽거나 쓸 주소를 담는 레지스터.
- MBR (Memory Buffer Register): 메모리에서 읽거나 쓸 데이터를 임시 저장하는 레지스터.
- IR (Instruction Register): 현재 처리 중인 명령어를 저장하는 레지스터.
- 범용 레지스터: 연산에 필요한 데이터나 연산 결과 임시 저장
- 특수 목적 레지스터:
- AC (Accumulator): 연산 결과 임시 저장
- CIR (Current Instruction Register): 현재 처리 중인 명령어 저장
- SR (Status Register): 연산 결과 상태 저장
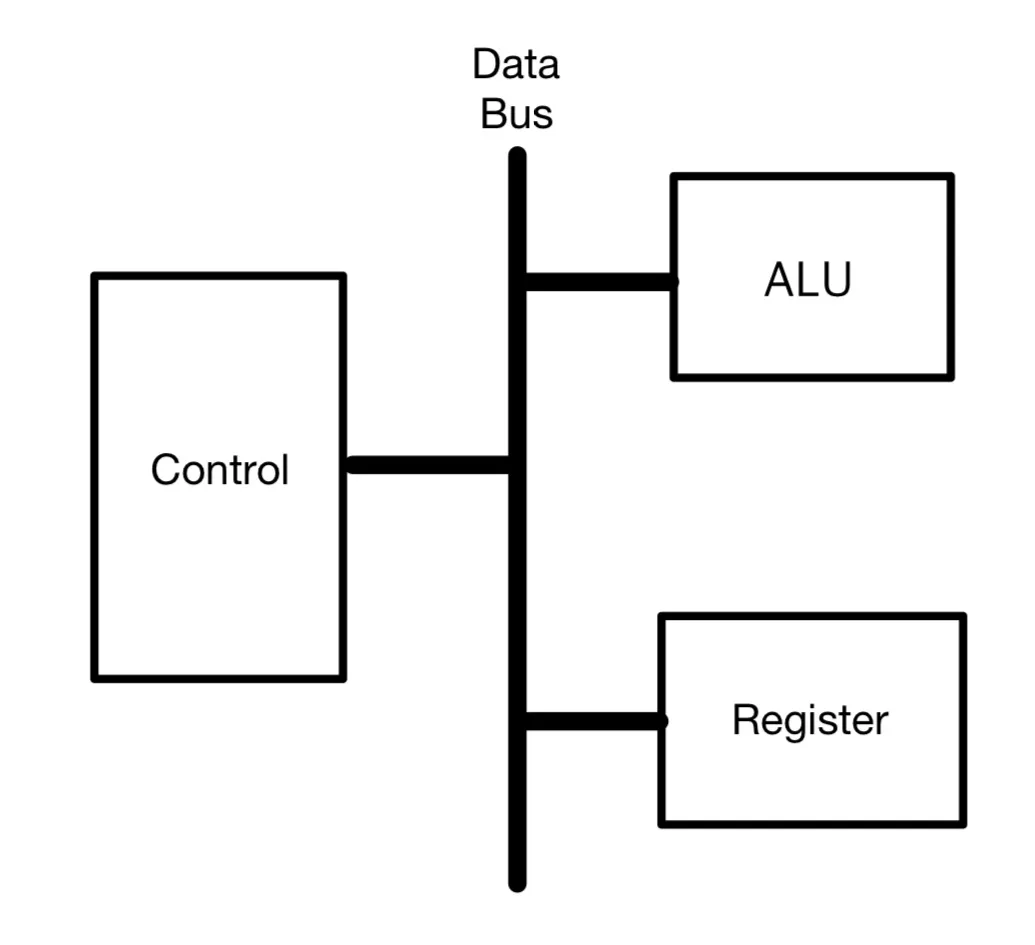
연산 장치
- ALU (Arithmetic Logic Unit): 모든 계산과 논리 연산을 수행하는 장치
- 산술: +, -, ×, ÷
- 논리: AND, OR, NOT, XOR 수행
제어 장치
- CU (Control Unit): CPU의 모든 작업을 지휘하는 지휘자 역할
- 명령어를 순서대로 실행할 수 있도록 함
- 명령어 해독
- 필요한 제어 신호를 다른 장치로 전송
정리
1. 레지스터
명령어:
- PC (Program Counter) → 다음 실행할 명령어 주소
- IR (Instruction Register) → 현재 명령어
메모리:
- MAR (Memory Address Register) → 메모리 주소
- MBR (Memory Buffer/Data Register) → 메모리 버퍼
연산:
- AC(Accumulator) → 연산 결과
- SR/FR (Status/Flag Register) → 연산 결과 상태
다목적:
- IX/IDX (Index Register) → 인덱스
- VR (Vector Register) → 병렬 처리(SIMD)
- 범용 레지스터 → 범용 레지스터 다목적
스택:
- SP (Stack Pointer) → 스택 최상단
- BP (Base Pointer) → 스택 기준점
2. 연산 장치
- ALU (Arithmetic Logic Unit) → 연산(산술, 논리)
3. 제어 장치
- CU (Control Unit) → 명령어 해석 및 제어 신호 생성
4. 캐시:
- 캐시 메모리(Cache Memory) → 임시 저장소(고속)
- MMU (Memory Management Unit) → 가상 주소를 물리 주소로 변환
2. CPU 작동 원리
1. 인출(Fetch)
- PC → MAR → 메모리 → MBR → IR, PC 증가
- PC에서 주소를 가져옴
- MAR에 저장
- MAR의 주소를 사용해 명령어를 읽음
- 명령어를 MBR에 저장
- MBR에 저장된 명령어를 IR에 저장
- PC 값 증가. 다음 명령어 준비
2. 해독(Decode)
- IR → 제어장치
- IR에 저장된 명령어를 제어장치로 전달
- 제어장치가 명령어 분석(해독)
- 필요한 제어 신호 생성
3. 실행(Execute)
- 제어장치 → ALU → 임시 결과 저장
- 제어장치가 명령어에 따라 필요한 제어 신호 보냄
- 필요한 데이터를 레지스터에서 가져옴
- ALU에서 연산
- 연산 결과 저장
4. 메모리(Memory Access)
- 필요시 수행
- 읽기: MAR에 주소 지정 → 메모리에서 데이터 읽기 → MBR에 저장
- 쓰기: MAR에 주소 지정 → MBR에 데이터 저장 → 메모리에 기록
5. 쓰기(Write Back)
- 결과를 레지스터에 저장
- MBR/ALU → 목적지 레지스터
3. 명령
구성
- 연산 코드(Operation Code) + 피연산자(Operand)로 구성.
ADD a, b - 연산 코드: 수행할 작업(ADD, SUB, MOV 등)
ADD - 피연산자: 작업 대상 데이터 또는 주소(보통 레지스터 이름으로
eax,ebx처럼 사용.)
eax,ebx
기본 명령어 유형
- 데이터 이동: MOV -> 저장, 복사
MOV eax, ebx (ebx 값을 eax에 복사) - 산술 연산: ADD(+), SUB(-), MUL(×), DIV(÷), INC(++), DEC(--)
- 논리 연산: AND, OR, XOR, NOT, SHL, SHR
- 분기문: JMP(레지스터로 점프), JZ(0이면 점프(return (0))), JNZ(0이 아니면 점프),
- 메모리 접근: LOAD(메모리 -> 레지스터), STORE(레지스터 -> 메모리)
(명령어)
- 데이터 이동:
MOV eax, ebx(ebx 값을 eax에 복사)MOV eax, [mem](메모리 값을 eax에 복사)MOV [mem], eax(eax 값을 메모리에 저장)
- 산술 연산:
ADD eax, ebx(eax = eax + ebx)SUB eax, 5(eax = eax - 5)MUL ebx(eax = eax * ebx)DIV ecx(eax = eax / ecx)INC eax(eax 값 1 증가)DEC eax(eax 값 1 감소)
- 논리 연산:
AND eax, ebx(eax = eax & ebx, 비트 AND)OR eax, 0xFF(eax = eax | 0xFF, 비트 OR)XOR eax, eax(eax = 0, 자기 자신과 XOR하면 0)NOT eax(eax의 모든 비트 반전)SHL eax, 2(eax를 왼쪽으로 2비트 시프트)SHR eax, 1(eax를 오른쪽으로 1비트 시프트)
- 분기문:
JMP label(label로 점프)JZ/JE label(결과가 0/같으면 label로 점프)JNZ/JNE label(결과가 0이 아님/같지 않으면 점프)JG/JA label(크면 점프)JL/JB label(작으면 점프)CALL function(함수 호출)RET(함수에서 복귀)
- 메모리 접근:
PUSH eax(eax 값을 스택에 저장)POP eax(스택 값을 eax에 저장)LEA eax, [ebx+4](ebx+4 주소를 eax에 로드)
- 비교 연산:
CMP eax, ebx(eax와 ebx 비교, 결과는 플래그 설정)TEST eax, ebx(eax와 ebx의 비트 AND 테스트)
- 기타:
NOP(아무 동작 안함)INT 0x80(시스템 콜, 리눅스)SYSCALL(시스템 콜, 최신 x64)
4. 어셈블리어
C 코드
// C 코드
int main() {
int a = 1;
int b = 2;
int c = a + b;
return c;
}어셈블리 버전
main:
push ebp ; 스택 프레임 설정
mov ebp, esp ; 새 베이스 포인터 설정
sub esp, 12 ; 변수 공간 확보
mov dword [ebp-4], 1 ; a = 1
mov dword [ebp-8], 2 ; b = 2
mov eax, [ebp-4] ; eax = a
add eax, [ebp-8] ; eax = eax + b
mov [ebp-12], eax ; c = eax
mov eax, [ebp-12] ; 반환값 설정
mov esp, ebp ; 스택 정리
pop ebp ; 이전 프레임 복원
ret ; 반환어셈블리어 명령과 CPU 동작 관계
| 어셈블리어 명령 | CPU 작동 과정 | 관련 구성 요소 |
|---|---|---|
push ebp | 스택에 값 저장 | 메모리 쓰기, 스택 포인터 감소 |
mov ebp, esp | 레지스터 간 데이터 복사 | 범용 레지스터 |
sub esp, 12 | 스택 공간 확보를 위한 뺄셈 | ALU(뺄셈 연산) |
mov [ebp-4], 1 | 메모리에 즉시값 저장 | MAR, MBR, 메모리 쓰기 |
mov eax, [ebp-4] | 메모리에서 레지스터로 데이터 로드 | MAR, MBR, 레지스터 |
add eax, [ebp-8] | 덧셈 연산 수행 | ALU(덧셈 연산), 범용 레지스터 |
ret | 실행 흐름 복귀 | PC 업데이트 |
CPU 구성 요소와 실제 레지스터 매핑 (x86)
- 범용 레지스터: eax, ebx, ecx, edx
- 스택 관리: esp(스택 포인터), ebp(베이스 포인터)
- 프로그램 카운터: eip(명령어 포인터)
- 상태 레지스터: eflags
CPU 시뮬
- 레지스터, 메모리, ALU, 제어장치를 클래스로 구현
- 명령어 세트 정의
- 인출-해독-실행 과정을 함수로 구현
실행 과정 (ADD 명령어)
- 시간 단계(T0, T1, T2) 표현
인출 사이클:
T0: MAR ← PC
T1: MBR ← M[MAR], PC ← PC+1
T2: IR ← MBR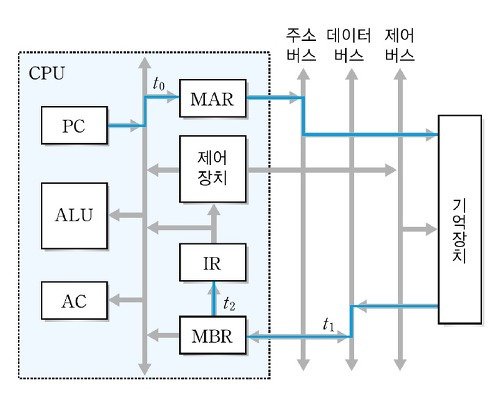
실행 사이클:
T0: MAR ← IR(Addr)
T1: MBR ← M[MAR]
T2: AC ← AC + MBR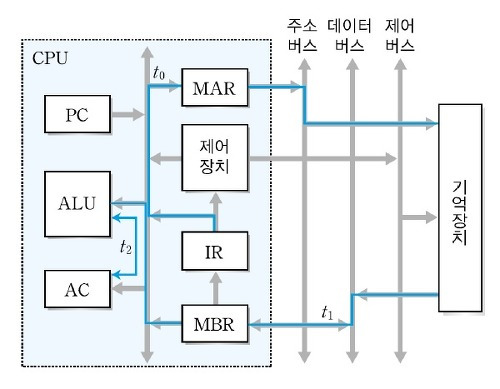
x86 어셈블리어 버전:
메모리의 값을 누산기에 더하는 연산
mov eax, [addr1] ; 누산기(eax)에 첫 번째 값 로드
add eax, [addr2] ; 두 번째 값을 누산기에 더함
mov [result], eax ; 결과를 메모리에 저장
; 각 어셈블리 명령어가 CPU 내부에서 처리될 때 일어나는 마이크로 연산:
; 'mov eax, [addr1]'이 실행될 때:
; 1. CPU는 addr1 주소를 MAR에 로드
; 2. 메모리에서 해당 값을 읽어 MBR에 저장
; 3. MBR의 값을 eax 레지스터로 전송
; 'add eax, [addr2]'가 실행될 때:
; 1. addr2 주소를 MAR에 로드
; 2. 메모리에서 해당 값을 읽어 MBR에 저장
; 3. ALU가 eax와 MBR 값을 더해 eax에 저장3. 성능 최적화 방식
5. 캐시 메모리
- 자주 쓰는 데이터를 CPU 가까이 두는 빠른 임시 저장소
- 메모리(RAM)는 느림 → 캐시로 속도 개선
구조
- L1 캐시: CPU 내부의 가장 빠른 캐시 (크기 작음)
- L2 캐시: L1보다 크지만 조금 느린 캐시
- L3 캐시: 여러 CPU 코어가 공유하는 더 큰 캐시
작동 원리
- 캐시 히트: CPU가 찾는 데이터가 캐시에 있으면 바로 사용
- 캐시 미스: 캐시에 없으면 메모리에서 가져와 캐시에 저장 후 사용
비유
- 책상(캐시) 위 자주 쓰는 책 vs 책장(메모리)에서 책 가져오기
- 가까이 있는 책상 위 책을 보는 게 훨씬 빠름
6. CPU 파이프라인
- 명령어 실행을 여러 단계로 나누어 동시에 여러 명령어 처리
5단계 파이프라인
- 인출(Fetch): 메모리에서 명령어 가져오기
- 해독(Decode): 명령어 해석
- 실행(Execute): 연산 수행
- 메모리(Memory): 필요시 메모리 접근
- 쓰기(Write Back): 결과 저장
동작
T1 T2 T3 T4 T5 T6 T7 T8 T9
명령1: [인출]→[해독]→[실행]→[메모리]→[쓰기]
명령2: [인출]→[해독]→[실행]→[메모리]→[쓰기]
명령3: [인출]→[해독]→[실행]→[메모리]→[쓰기]문제점
- 데이터 의존성: 이전 명령어 결과가 필요한 경우
- 제어 의존성: 분기문으로 실행 경로 변경 시
- 구조적 의존성: 같은 하드웨어 자원 필요 시
해결
- 데이터 포워딩: 결과를 바로 다음 단계로 전달
- 분기 예측: 실행 경로 미리 예측
- 명령어 재배치: 의존성 없는 명령어 먼저 실행
7. 분기 예측
개념
- CPU 파이프라인에서 조건문(if/else) 만날 때 다음 실행 경로 미리 예측
- 예측 성공 시 파이프라인 계속 진행, 실패 시 파이프라인 초기화로 성능 저하
성능 영향
- 예측 실패: 15-20 사이클 지연 발생
- 반복 실행되는 코드에서 큰 성능 차이 유발
최적화 방법
- 분기 없는 코드 작성: 조건부 연산자 활용
if(a>b) x=a; else x=b;→x = (a>b) ? a : b;
- 가능성 높은 코드 먼저: 자주 실행되는 경로 우선 배치
- 패턴 예측성 높이기: 일관된 조건 사용
- 데이터 정렬: 정렬된 데이터는 예측 성공률 향상
예시
// 분기 있는 코드
if (value > threshold) {
result += value;
}
// 분기 없는 코드
result += (value > threshold) * value;https://porolog.tistory.com/15
https://namu.wiki/w/CPU/%EA%B5%AC%EC%A1%B0%EC%99%80%20%EC%9B%90%EB%A6%AC
- 시뮬레이터 코드
#include <iostream> #include <vector> #include <map> #include <string> #include <functional> #include <cstdint> using namespace std; // 메모리 클래스 class Memory { private: vector<uint8_t> data; public: Memory(size_t size = 65536) : data(size, 0) {} uint8_t read8(uint16_t address) const { return data[address]; } uint16_t read16(uint16_t address) const { return static_cast<uint16_t>(data[address]) | (static_cast<uint16_t>(data[address + 1]) << 8); } void write8(uint16_t address, uint8_t value) { data[address] = value; } void write16(uint16_t address, uint16_t value) { data[address] = value & 0xFF; data[address + 1] = (value >> 8) & 0xFF; } void load_program(const vector<uint8_t>& program, uint16_t start_address = 0) { for (size_t i = 0; i < program.size(); i++) { data[start_address + i] = program[i]; } } }; // 레지스터 클래스 class Registers { public: uint16_t PC; // 프로그램 카운터 uint16_t IR; // 명령어 레지스터 uint16_t MAR; // 메모리 주소 레지스터 uint16_t MBR; // 메모리 버퍼 레지스터 uint16_t AC; // 누산기 uint16_t SP; // 스택 포인터 uint16_t BP; // 베이스 포인터 // 범용 레지스터 uint16_t R0, R1, R2, R3; // 상태 플래그 bool Z; // 제로 플래그 bool C; // 캐리 플래그 bool N; // 네거티브 플래그 bool V; // 오버플로우 플래그 Registers() : PC(0), IR(0), MAR(0), MBR(0), AC(0), SP(0), BP(0), R0(0), R1(0), R2(0), R3(0), Z(false), C(false), N(false), V(false) {} void reset() { PC = IR = MAR = MBR = AC = SP = BP = R0 = R1 = R2 = R3 = 0; Z = C = N = V = false; } }; // ALU 클래스 class ALU { private: Registers& registers; public: ALU(Registers& regs) : registers(regs) {} uint16_t add(uint16_t a, uint16_t b) { uint32_t result = static_cast<uint32_t>(a) + static_cast<uint32_t>(b); // 상태 플래그 업데이트 registers.Z = (result & 0xFFFF) == 0; registers.C = (result > 0xFFFF); registers.N = (result & 0x8000) != 0; registers.V = ((a & 0x8000) == (b & 0x8000)) && ((result & 0x8000) != (a & 0x8000)); return static_cast<uint16_t>(result); } uint16_t sub(uint16_t a, uint16_t b) { return add(a, ~b + 1); // 2의 보수를 이용한 뺄셈 } uint16_t mul(uint16_t a, uint16_t b) { uint32_t result = static_cast<uint32_t>(a) * static_cast<uint32_t>(b); registers.Z = (result & 0xFFFF) == 0; registers.C = (result > 0xFFFF); return static_cast<uint16_t>(result); } uint16_t div(uint16_t a, uint16_t b) { if (b == 0) { // 0으로 나누기 시도 (실제로는 예외처리 필요) cout << "Error: Division by zero" << endl; return 0; } uint16_t result = a / b; registers.Z = result == 0; return result; } uint16_t logical_and(uint16_t a, uint16_t b) { uint16_t result = a & b; registers.Z = result == 0; registers.N = (result & 0x8000) != 0; return result; } uint16_t logical_or(uint16_t a, uint16_t b) { uint16_t result = a | b; registers.Z = result == 0; registers.N = (result & 0x8000) != 0; return result; } uint16_t logical_xor(uint16_t a, uint16_t b) { uint16_t result = a ^ b; registers.Z = result == 0; registers.N = (result & 0x8000) != 0; return result; } uint16_t logical_not(uint16_t a) { uint16_t result = ~a; registers.Z = result == 0; registers.N = (result & 0x8000) != 0; return result; } uint16_t shift_left(uint16_t a, uint16_t count) { uint16_t result = a << count; registers.Z = result == 0; registers.N = (result & 0x8000) != 0; // 마지막으로 밀려나간 비트가 캐리 registers.C = (count > 0) && ((a & (1 << (16 - count))) != 0); return result; } uint16_t shift_right(uint16_t a, uint16_t count) { uint16_t result = a >> count; registers.Z = result == 0; registers.N = (result & 0x8000) != 0; // 마지막으로 밀려나간 비트가 캐리 registers.C = (count > 0) && ((a & (1 << (count - 1))) != 0); return result; } }; // 명령어 집합 정의 (Op codes) enum OpCode { // 데이터 이동 MOV = 0x10, LOAD = 0x11, STORE = 0x12, PUSH = 0x13, POP = 0x14, // 산술 연산 ADD = 0x20, SUB = 0x21, MUL = 0x22, DIV = 0x23, INC = 0x24, DEC = 0x25, // 논리 연산 AND = 0x30, OR = 0x31, XOR = 0x32, NOT = 0x33, SHL = 0x34, SHR = 0x35, // 분기 JMP = 0x40, JZ = 0x41, JNZ = 0x42, JG = 0x43, JL = 0x44, // 시스템 & 특수 명령어 CALL = 0x50, RET = 0x51, NOP = 0x00, HALT = 0xFF }; // CPU 클래스 class CPU { private: Memory& memory; Registers registers; ALU alu; bool running; // 명령어 핸들러 맵 map<OpCode, function<void(uint8_t)>> instruction_handlers; public: CPU(Memory& mem) : memory(mem), registers(), alu(registers), running(false) { initialize_instruction_handlers(); } void initialize_instruction_handlers() { // 각 명령어 타입별 실행 함수 등록 instruction_handlers[NOP] = [this](uint8_t operand) { /* 아무것도 하지 않음 */ }; instruction_handlers[MOV] = [this](uint8_t operand) { uint8_t dest = (operand >> 4) & 0x0F; uint8_t src = operand & 0x0F; uint16_t value = get_register_value(src); set_register_value(dest, value); }; instruction_handlers[LOAD] = [this](uint8_t operand) { uint8_t reg = (operand >> 4) & 0x0F; uint16_t address = memory.read16(registers.PC); registers.PC += 2; uint16_t value = memory.read16(address); set_register_value(reg, value); }; instruction_handlers[STORE] = [this](uint8_t operand) { uint8_t reg = (operand >> 4) & 0x0F; uint16_t address = memory.read16(registers.PC); registers.PC += 2; uint16_t value = get_register_value(reg); memory.write16(address, value); }; instruction_handlers[ADD] = [this](uint8_t operand) { uint8_t dest = (operand >> 4) & 0x0F; uint8_t src = operand & 0x0F; uint16_t a = get_register_value(dest); uint16_t b = get_register_value(src); uint16_t result = alu.add(a, b); set_register_value(dest, result); }; instruction_handlers[SUB] = [this](uint8_t operand) { uint8_t dest = (operand >> 4) & 0x0F; uint8_t src = operand & 0x0F; uint16_t a = get_register_value(dest); uint16_t b = get_register_value(src); uint16_t result = alu.sub(a, b); set_register_value(dest, result); }; instruction_handlers[JMP] = [this](uint8_t operand) { uint16_t address = memory.read16(registers.PC); registers.PC = address; }; instruction_handlers[JZ] = [this](uint8_t operand) { uint16_t address = memory.read16(registers.PC); registers.PC += 2; if (registers.Z) { registers.PC = address; } }; instruction_handlers[JNZ] = [this](uint8_t operand) { uint16_t address = memory.read16(registers.PC); registers.PC += 2; if (!registers.Z) { registers.PC = address; } }; instruction_handlers[HALT] = [this](uint8_t operand) { running = false; }; // 나머지 명령어 핸들러들 추가... } // 레지스터 값 가져오기 헬퍼 함수 uint16_t get_register_value(uint8_t reg_code) { switch (reg_code) { case 0: return registers.R0; case 1: return registers.R1; case 2: return registers.R2; case 3: return registers.R3; case 4: return registers.PC; case 5: return registers.SP; case 6: return registers.BP; case 7: return registers.AC; default: cout << "Error: Invalid register code: " << (int)reg_code << endl; return 0; } } // 레지스터 값 설정 헬퍼 함수 void set_register_value(uint8_t reg_code, uint16_t value) { switch (reg_code) { case 0: registers.R0 = value; break; case 1: registers.R1 = value; break; case 2: registers.R2 = value; break; case 3: registers.R3 = value; break; case 4: registers.PC = value; break; case 5: registers.SP = value; break; case 6: registers.BP = value; break; case 7: registers.AC = value; break; default: cout << "Error: Invalid register code: " << (int)reg_code << endl; } } // 인출-해독-실행 사이클 void fetch_decode_execute() { // 인출 단계 registers.MAR = registers.PC; registers.MBR = memory.read8(registers.MAR); registers.PC++; registers.IR = registers.MBR; // 해독 단계 uint8_t opcode = registers.IR; uint8_t operand = memory.read8(registers.PC); registers.PC++; // 실행 단계 if (instruction_handlers.find(static_cast<OpCode>(opcode)) != instruction_handlers.end()) { instruction_handlers[static_cast<OpCode>(opcode)](operand); } else { cout << "Error: Unknown opcode: 0x" << hex << (int)opcode << endl; running = false; } } void reset() { registers.reset(); running = false; } void run() { running = true; while (running) { fetch_decode_execute(); // 디버깅을 위한 상태 출력 print_state(); } } // CPU 상태 출력을 위한 디버그 함수 void print_state() { cout << "PC: 0x" << hex << registers.PC << " "; cout << "IR: 0x" << hex << registers.IR << " "; cout << "AC: 0x" << hex << registers.AC << " "; cout << "SP: 0x" << hex << registers.SP << " "; cout << "BP: 0x" << hex << registers.BP << endl; cout << "R0: 0x" << hex << registers.R0 << " "; cout << "R1: 0x" << hex << registers.R1 << " "; cout << "R2: 0x" << hex << registers.R2 << " "; cout << "R3: 0x" << hex << registers.R3 << endl; cout << "Flags - Z: " << registers.Z << " C: " << registers.C; cout << " N: " << registers.N << " V: " << registers.V << endl; cout << "------------------------------------------" << endl; } }; // 샘플 프로그램 예제 (간단한 어셈블리 프로그램을 실행) int main() { // 메모리 생성 Memory memory; // 샘플 프로그램 작성 // 이 프로그램은 R0에 10을 로드하고, R1에 20을 로드한 다음, 두 값을 더해 R2에 저장합니다. vector<uint8_t> program = { // R0 = 10 MOV, 0x70, // Acc에 값을 로드 (7: AC) 0x0A, 0x00, // 값: 10 MOV, 0x07, // R0 = Acc // R1 = 20 MOV, 0x70, // Acc에 값을 로드 0x14, 0x00, // 값: 20 MOV, 0x17, // R1 = Acc // R2 = R0 + R1 MOV, 0x70, // Acc = R0 ADD, 0x71, // Acc += R1 MOV, 0x27, // R2 = Acc // 프로그램 종료 HALT, 0x00 }; // 프로그램 로드 memory.load_program(program); // CPU 생성 및 실행 CPU cpu(memory); cpu.reset(); cpu.run(); return 0; }

치킨강정