point cloud
포인트 클라우드
"Point cloud(포인트 클라우드)"는 3차원 공간에서의 점(포인트)들의 집합을 나타내는 컴퓨터 비전 및 컴퓨터 그래픽스 분야에서 중요한 개념입니다. 각 점은 공간 내의 위치를 나타내며 종종 (x, y, z) 좌표로 표현됩니다. Point cloud는 현실 세계에서의 물체나 환경의 3차원 구조를 표현하는 데 사용됩니다. 여기에는 Point cloud의 주요 특징과 사용 사례에 대한 설명이 포함됩니다:
점의 집합: Point cloud는 많은 점들의 집합으로 구성됩니다. 각 점은 공간에서의 하나의 위치를 나타내며, 이 위치는 일반적으로 (x, y, z) 좌표로 표현됩니다.
3D 정보 표현: Point cloud는 3차원 공간에서의 정보를 효과적으로 표현합니다. 이를 통해 현실 세계의 물체나 환경의 3D 구조를 캡처하고 분석할 수 있습니다.
다양한 출처: Point cloud 데이터는 다양한 출처에서 생성됩니다. 3D 스캐너, 레이더, 스테레오 카메라, 드론, 리더 및 컴퓨터 비전 기술을 사용하여 생성할 수 있습니다.
컴퓨터 비전 및 로봇 공학: Point cloud는 컴퓨터 비전 및 로봇 공학 분야에서 널리 사용됩니다. 물체 인식, 환경 모델링, 자율 주행 차량 및 로봇의 위치 추정 및 장애물 회피 등에 활용됩니다.
레이더와 라이다: 자율 주행 자동차 및 로봇에 사용되는 레이더와 라이다 센서는 주변 환경의 Point cloud를 생성하는 데 사용됩니다.
구조 분석: 건설 산업, 사진 측량, 지형 분석 등에서 지형 및 건물과 같은 대규모 구조물을 분석하는 데 활용됩니다.
시각화 및 가상 현실: Point cloud는 3D 모델링 및 시각화 도구를 사용하여 가상 현실 환경을 생성하고 시각화하는 데 사용됩니다.
3D 스캐닝: Point cloud 데이터는 3D 스캐너를 사용하여 물체의 형태와 표면을 정확하게 캡처하는 데 유용합니다.
점 군집화 및 객체 검출: Point cloud 데이터는 컴퓨터 비전 알고리즘을 사용하여 물체를 감지하고 분할하는 데 사용됩니다.
Point cloud는 다양한 산업 및 응용 분야에서 3D 데이터 분석과 가시화에 중요한 역할을 합니다. 이러한 데이터는 물체 인식, 로봇 공학, 시뮬레이션, 건설 및 지리 정보 시스템(GIS)과 같은 다양한 분야에서 활용됩니다.
포인트 클라우드는 딥러닝에 사용하기 위해 representation을 해야함
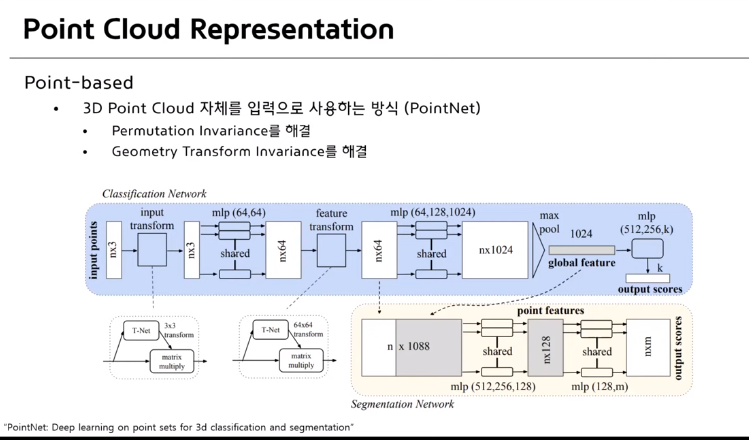
PointNet는 3D 포인트 클라우드 데이터를 처리하고 분석하기 위한 딥러닝 아키텍처입니다. 이는 2016년에 Charles R. Qi 등에 의해 발표된 "PointNet: 3D Classification and Segmentation을 위한 포인트 집합에 대한 딥러닝" 논문에서 소개되었으며 Neural Information Processing Systems (NeurIPS) 컨퍼런스에서 발표되었습니다.
PointNet는 특히 정렬되지 않은 포인트 클라우드 데이터를 효과적으로 처리하기 위해 설계되었으며, 이는 LiDAR 센서, 깊이 카메라 및 3D 스캔과 같은 다양한 출처에서 얻은 3D 데이터의 공통 표현입니다. PointNet와 관련된 주요 특징과 개념은 다음과 같습니다:
포인트 클라우드 처리: PointNet는 그리드 또는 복셀 기반 표현으로 데이터를 변환하지 않고 원시 포인트 클라우드 데이터를 직접 처리합니다. 이것은 기하학적 세부 정보를 보존하고 다양한 크기의 포인트 클라우드를 처리하는 데 유용합니다.
순서 무관성: 포인트 클라우드 처리의 주요 과제 중 하나는 포인트 순서가 다를 수 있다는 것입니다. PointNet는 입력 포인트의 순서에 대해 무관한 대칭 함수를 도입하여 이 문제를 해결합니다. 이렇게 하면 PointNet은 포인트 클라우드를 어떤 순서로든 처리할 수 있습니다.
네트워크 아키텍처: PointNet은 입력 포인트를 개별적으로 처리하며 모든 포인트에 대해 동일한 방식으로 처리하기 위해 공유 가중치를 사용하는 신경망 아키텍처로 구성됩니다. 이 설계는 PointNet이 지역적인 특징을 효과적으로 캡처할 수 있도록 합니다.
응용 분야: PointNet는 3D 물체 분류, 부분 분할, 장면 분할 등 다양한 3D 데이터 분석 작업에 적용됩니다. 이러한 작업에서 PointNet은 탁월한 결과를 보여주며 3D 포인트 클라우드 데이터를 다루는 딥 러닝에서 중요한 아키텍처로 자리잡았습니다.
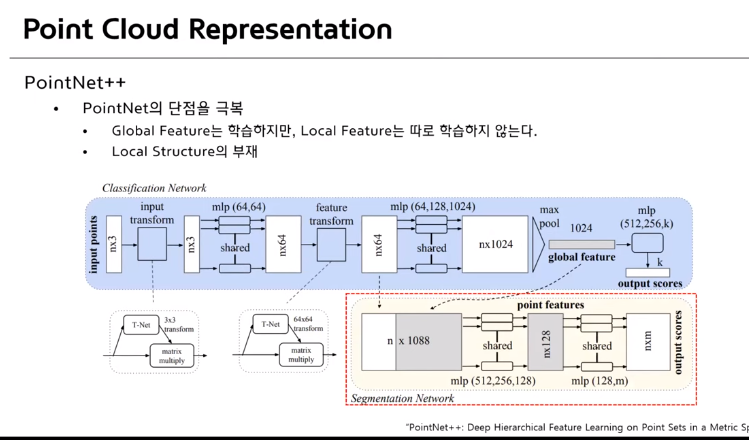
확장성: PointNet 소개 이후 PointNet++와 같은 확장 및 개선 사항도 있으며, PointNet의 능력을 더욱 향상시키기 위해 여러 규모에서 정보를 집계합니다.
3D 물체 인식: PointNet는 3D 물체 인식과 같은 작업에 활용됩니다. 이를 통해 원시 포인트 클라우드 데이터를 입력으로 받아 물체를 사전 정의된 범주로 분류할 수 있습니다.
시맨틱 세그멘테이션: 또 다른 응용 분야는 3D 장면의 시맨틱 세그멘테이션으로, PointNet을 사용하여 포인트 클라우드의 각 포인트를 시맨틱 범주(예: 지면, 건물, 자동차)로 레이블링하여 장면의 구조를 이해합니다.
PointNet 및 해당 변형은 3D 데이터 분야에서 근본적인 진전을 이루어 3D 데이터를 처리하고 분석하기 위한 효과적인 방법을 제공하며 다양한 응용 분야에서 사용됩니다.