오늘은 99클럽 코테 스터디 27일차입니다.
오늘 문제는 어제와 동일하게 구현 및 시뮬레이션 유형의 문제입니다.
1. 오늘의 학습 키워드
- 리스트
- 딕셔너리
- 구현
- 시뮬레이션
2. 문제: 공원 산책
문제 설명
지나다니는 길을 'O', 장애물을 'X'로 나타낸 직사각형 격자 모양의 공원에서 로봇 강아지가 산책을 하려합니다. 산책은 로봇 강아지에 미리 입력된 명령에 따라 진행하며, 명령은 다음과 같은 형식으로 주어집니다.
- ["방향 거리", "방향 거리" … ]
예를 들어 "E 5"는 로봇 강아지가 현재 위치에서 동쪽으로 5칸 이동했다는 의미입니다. 로봇 강아지는 명령을 수행하기 전에 다음 두 가지를 먼저 확인합니다.
- 주어진 방향으로 이동할 때 공원을 벗어나는지 확인합니다.
- 주어진 방향으로 이동 중 장애물을 만나는지 확인합니다.
위 두 가지중 어느 하나라도 해당된다면, 로봇 강아지는 해당 명령을 무시하고 다음 명령을 수행합니다.
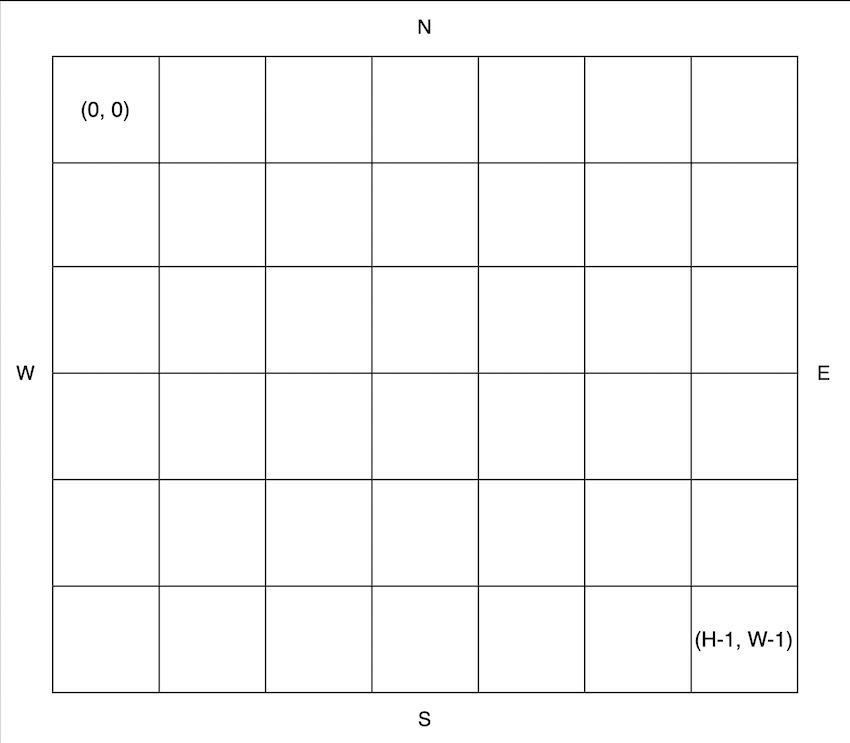
공원의 가로 길이가 W, 세로 길이가 H라고 할 때, 공원의 좌측 상단의 좌표는 (0, 0), 우측 하단의 좌표는 (H - 1, W - 1) 입니다.
공원을 나타내는 문자열 배열 park, 로봇 강아지가 수행할 명령이 담긴 문자열 배열 routes가 매개변수로 주어질 때, 로봇 강아지가 모든 명령을 수행 후 놓인 위치를 [세로 방향 좌표, 가로 방향 좌표] 순으로 배열에 담아 return 하도록 solution 함수를 완성해주세요.
제한사항
- 3 ≤
park의 길이 ≤ 50- 3 ≤
park[i]의 길이 ≤ 50park[i]는 다음 문자들로 이루어져 있으며 시작지점은 하나만 주어집니다.- S : 시작 지점
- O : 이동 가능한 통로
- X : 장애물
park는 직사각형 모양입니다.
- 3 ≤
- 1 ≤
routes의 길이 ≤ 50routes의 각 원소는 로봇 강아지가 수행할 명령어를 나타냅니다.- 로봇 강아지는
routes의 첫 번째 원소부터 순서대로 명령을 수행합니다. routes의 원소는 "op n"과 같은 구조로 이루어져 있으며, op는 이동할 방향, n은 이동할 칸의 수를 의미합니다.- op는 다음 네 가지중 하나로 이루어져 있습니다.
- N : 북쪽으로 주어진 칸만큼 이동합니다.
- S : 남쪽으로 주어진 칸만큼 이동합니다.
- W : 서쪽으로 주어진 칸만큼 이동합니다.
- E : 동쪽으로 주어진 칸만큼 이동합니다.
- 1 ≤ n ≤ 9
- op는 다음 네 가지중 하나로 이루어져 있습니다.
입출력 예
| park | routes | result |
|---|---|---|
| ["SOO","OOO","OOO"] | ["E 2","S 2","W 1"] | [2,1] |
| ["SOO","OXX","OOO"] | ["E 2","S 2","W 1"] | [0,1] |
| ["OSO","OOO","OXO","OOO"] | ["E 2","S 3","W 1"] | [0,0] |
입출력 예 설명
입출력 예 #1
입력된 명령대로 동쪽으로 2칸, 남쪽으로 2칸, 서쪽으로 1칸 이동하면 [0,0] -> [0,2] -> [2,2] -> [2,1]이 됩니다.
입출력 예 #2
입력된 명령대로라면 동쪽으로 2칸, 남쪽으로 2칸, 서쪽으로 1칸 이동해야하지만 남쪽으로 2칸 이동할 때 장애물이 있는 칸을 지나기 때문에 해당 명령을 제외한 명령들만 따릅니다. 결과적으로는 [0,0] -> [0,2] -> [0,1]이 됩니다.
입출력 예 #3
처음 입력된 명령은 공원을 나가게 되고 두 번째로 입력된 명령 또한 장애물을 지나가게 되므로 두 입력은 제외한 세 번째 명령만 따르므로 결과는 다음과 같습니다. [0,1] -> [0,0]
3. 나의 풀이
접근 방법
이번 문제는 일반적인 시뮬레이션 문제들의 유형을 크게 벗어나지 않는 유형입니다. 장애물은 못지나가고, 주어진 방향 (routes)대로 진행해서 나오는 결과를 리턴하는 문제입니다. 다만, 짚고 넘어가야할 점이 있다면, 아래 두 가지 경우에는 해당 명령어를 pass하고 다음 명령어를 수행해야합니다.
- 주어진 방향으로 이동할 때 공원을 벗어나는지 확인합니다.
- 주어진 방향으로 이동 중 장애물을 만나는지 확인합니다.
이 점만을 잘 구현한다면 크게 어렵지 않을 것 같습니다.
우선, 동, 서, 남, 북에 따른 방향성을 딕셔너리 형태로 먼저 만듭니다.
directions = {"E":(0,1),'W':(0,-1),'S':(1,0),'N':(-1,0)}그 다음, 출발점에 해당하는 x 값, y값을 설정합니다.
for i in range(len(park)):
for j in range(len(park[0])):
if park[i][j] == 'S':
x, y = i,j이렇게 진행하면, 출발점이 정해지고, routes 변수에 있는 명령어에 맞춰, 로봇 강아지가 움직이면 됩니다.
for route in routes:
direction, steps = route.split()
dx, dy = directions[direction] # op에 해당하는 n값
nx = x
ny = y
valid = True
for _ in range(int(steps)):
nx += dx
ny += dy
# 좌표가 벗어나는 경우 : 해당 명령을 제외하고 다음 명령으로 넘어가야 한다.
if not (0 <= nx < len(park) and 0 <= ny < len(park[0])) or park[nx][ny] == 'X':
valid = False
break
if valid:
x, y = nx, ny위 코드를 순서대로 살펴보겠습니다.
- 먼저, 로봇 강아지의 실행 명령 변수 routes의 반복문을 돌립니다.
- 나오는 route는 “operation n” 형태로 이뤄져있고, operation은 방향성, n은 operation 방향성으로 몇 칸 이동하는지를 나타내는 변수입니다. 이것을 direction, steps변수에 할당합니다.
- x, y변수에는 시작점의 좌표가 들어있는데 nx, ny에 참조를 시킵니다. 왜냐하면 추후, 좌표가 벗어나는 예외의 경우에 다음 명령어를 실행하는데, 이때까지의 좌표를 저장해야 하기 때문입니다.
- 이제 방향성이 정해졌기 때문에 steps (n)만큼 이동하는 과정을 취합니다.
- 여기서 좌표가 벗어나는 경우에는 해당 명령어 (route)를 무시하고 넘어가야 하므로 break문을 작동시킵니다.
- valid 변수는 route를 수행하는데 문제가 없을 경우 True, 있을 경우 False를 표시합니다. valid가 True이면, 계속해서 현재 위치 (x,y)를 업데이트 합니다.
전체 코드는 아래와 같습니다:
def solution(park, routes):
directions = {"E":(0,1),'W':(0,-1),'S':(1,0),'N':(-1,0)}
x, y = 0, 0
for i in range(len(park)):
for j in range(len(park[0])):
if park[i][j] == 'S':
x, y = i,j
for route in routes:
direction, steps = route.split()
dx, dy = directions[direction] # op에 해당하는 n값
nx = x
ny = y
valid = True
for _ in range(int(steps)):
nx += dx
ny += dy
# 좌표가 벗어나는 경우 : 해당 명령을 제외하고 다음 명령으로 넘어가야 한다.
if not (0 <= nx < len(park) and 0 <= ny < len(park[0])) or park[nx][ny] == 'X':
valid = False
break
if valid:
x, y = nx, ny
return [x,y]4. 결론
이번 문제는 구현 및 시뮬레이션 기반의 문제였습니다. 개인적으로 저는 이런 유형의 문제에 취약한 것 같네요.. 많은 연습을 해야할 것 같습니다.
읽어주셔서 감사합니다!