📌 문제
문제 설명
지나다니는 길을 'O', 장애물을 'X'로 나타낸 직사각형 격자 모양의 공원에서 로봇 강아지가 산책을 하려합니다. 산책은 로봇 강아지에 미리 입력된 명령에 따라 진행하며, 명령은 다음과 같은 형식으로 주어집니다.
["방향 거리", "방향 거리" … ]
예를 들어 "E 5"는 로봇 강아지가 현재 위치에서 동쪽으로 5칸 이동했다는 의미입니다. 로봇 강아지는 명령을 수행하기 전에 다음 두 가지를 먼저 확인합니다.
주어진 방향으로 이동할 때 공원을 벗어나는지 확인합니다.
주어진 방향으로 이동 중 장애물을 만나는지 확인합니다.
위 두 가지중 어느 하나라도 해당된다면, 로봇 강아지는 해당 명령을 무시하고 다음 명령을 수행합니다.
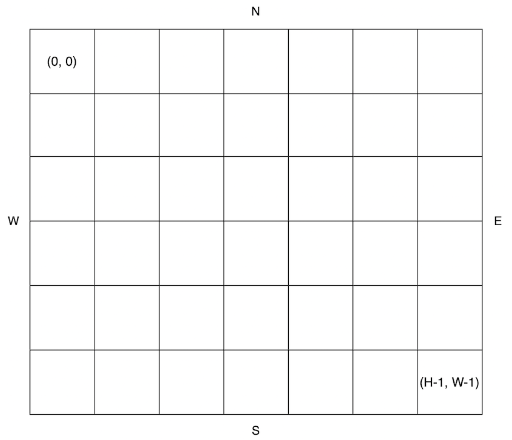
공원의 가로 길이가 W, 세로 길이가 H라고 할 때, 공원의 좌측 상단의 좌표는 (0, 0), 우측 하단의 좌표는 (H - 1, W - 1) 입니다.
공원을 나타내는 문자열 배열 park, 로봇 강아지가 수행할 명령이 담긴 문자열 배열 routes가 매개변수로 주어질 때, 로봇 강아지가 모든 명령을 수행 후 놓인 위치를 [세로 방향 좌표, 가로 방향 좌표] 순으로 배열에 담아 return 하도록 solution 함수를 완성해주세요.
제한 사항
- 3 ≤ park의 길이 ≤ 50
- 3 ≤ park[i]의 길이 ≤ 50
- park[i]는 다음 문자들로 이루어져 있으며 시작지점은 하나만 주어집니다.
- S : 시작 지점
- O : 이동 가능한 통로
- X : 장애물
- park[i]는 다음 문자들로 이루어져 있으며 시작지점은 하나만 주어집니다.
- park는 직사각형 모양입니다.
- 3 ≤ park[i]의 길이 ≤ 50
- 1 ≤ routes의 길이 ≤ 50
- routes의 각 원소는 로봇 강아지가 수행할 명령어를 나타냅니다.
- 로봇 강아지는 routes의 첫 번째 원소부터 순서대로 명령을 수행합니다.
- routes의 원소는 "op n"과 같은 구조로 이루어져 있으며, op는 이동할 방향, n은 이동할 칸의 수를 의미합니다.
- op는 다음 네 가지중 하나로 이루어져 있습니다.
- N : 북쪽으로 주어진 칸만큼 이동합니다.
- S : 남쪽으로 주어진 칸만큼 이동합니다.
- W : 서쪽으로 주어진 칸만큼 이동합니다.
- E : 동쪽으로 주어진 칸만큼 이동합니다.
- 1 ≤ n ≤ 9
- op는 다음 네 가지중 하나로 이루어져 있습니다.
입출력 예
| park | routes | result |
|---|---|---|
| ["SOO","OOO","OOO"] | ["E 2","S 2","W 1"] | [2,1] |
| ["SOO","OXX","OOO"] | ["E 2","S 2","W 1"] | [0,1] |
| ["OSO","OOO","OXO","OOO"] | ["E 2","S 3","W 1"] | [0,0] |
입출력 예 설명
입출력 예 #1
입력된 명령대로 동쪽으로 2칸, 남쪽으로 2칸, 서쪽으로 1칸 이동하면 [0,0] -> [0,2] -> [2,2] -> [2,1]이 됩니다.
입출력 예 #2
입력된 명령대로라면 동쪽으로 2칸, 남쪽으로 2칸, 서쪽으로 1칸 이동해야하지만 남쪽으로 2칸 이동할 때 장애물이 있는 칸을 지나기 때문에 해당 명령을 제외한 명령들만 따릅니다. 결과적으로는 [0,0] -> [0,2] -> [0,1]이 됩니다.
입출력 예 #3
처음 입력된 명령은 공원을 나가게 되고 두 번째로 입력된 명령 또한 장애물을 지나가게 되므로 두 입력은 제외한 세 번째 명령만 따르므로 결과는 다음과 같습니다. [0,1] -> [0,0]
📌 풀이
코드
def solution(park, routes):
# {S : 0, O : 1, X : -1} 인 차원 배열 만들기
dict_p = { "S" : 0, "O" : 1, "X" : -1 }
park_arr = list()
for y in park :
temp_arr = list()
for x in y :
temp_arr.append(dict_p[x])
park_arr.append(temp_arr)
H = len(park_arr) - 1 # 높이(인덱스로 맞춰주기 위해 1 빼줌)
W = len(park_arr[0]) - 1 # 넓이(인덱스로 맞춰주기 위해 1 빼줌)
# 시작점 찾기
for y in range(len(park)) :
if 'S' in park[y] :
for x in range(len(park[y])) :
if park[y][x] == 'S':
start = [y, x]
y, x = start[0], start[1] # 강아지 위치 - 시작점으로 초기화
# 동작
for r in routes :
direc, dist = r.split()[0], int(r.split()[1]) # 방향과 거리
if direc == 'E' :
if x + dist <= W and not -1 in park_arr[y][x : x + dist + 1] : # 공원을 넘지도 않고, 진행 방향에 -1이 없는 경우에만 이동
x += dist
if direc == 'W' :
if x - dist >= 0 and not -1 in park_arr[y][x - dist : x] :
x -= dist
if direc == 'S' :
y_arr = [park_arr[i][x] for i in range(len(park_arr))] # 해당 위치의 y 값들
if y + dist <= H and not -1 in y_arr[y : y + dist + 1] :
y += dist
if direc == 'N' :
y_arr = [park_arr[i][x] for i in range(len(park_arr))] # 해당 위치의 y 값들
if y - dist >= 0 and not -1 in y_arr[y - dist : y] :
y -= dist
# 마지막 동작까지 다 한 후의 위치
answer = [y, x]
return answer설명
입력받은 park를 0, 1, -1,로 바꾼다.(지금 생각하니 굳이 안해도 될 것 같다.) 그리고 시작지점을 찾아 start에 넣어준다. 강아지 초기 위치는 start이다. 그리고 routes를 돌면서 갈 수 있는지 판단하는데, 주요 조건은 아래와 같다.
- 방향(
direc) - E, W, S, N 중 하나를 받는다. - 명령 수행 시 공원 범위를 넘어가는지 - 각 방향마다 H와 W를 현재 위치와 명령 거리(
dist)를 계산해서 비교 - 가는 길에 장애물이 있는지 확인 - 슬라이싱을 해주고, 슬라이싱 한 결과에 -1이 포함되어있는지 확인, -1이 슬라이싱한 리스트 안에 있으면 장애물을 만난 것이므로 갈 수 없음
위 조건을 모두 만족하면 강아지 위치인 y와 x를 업데이트 한다.
