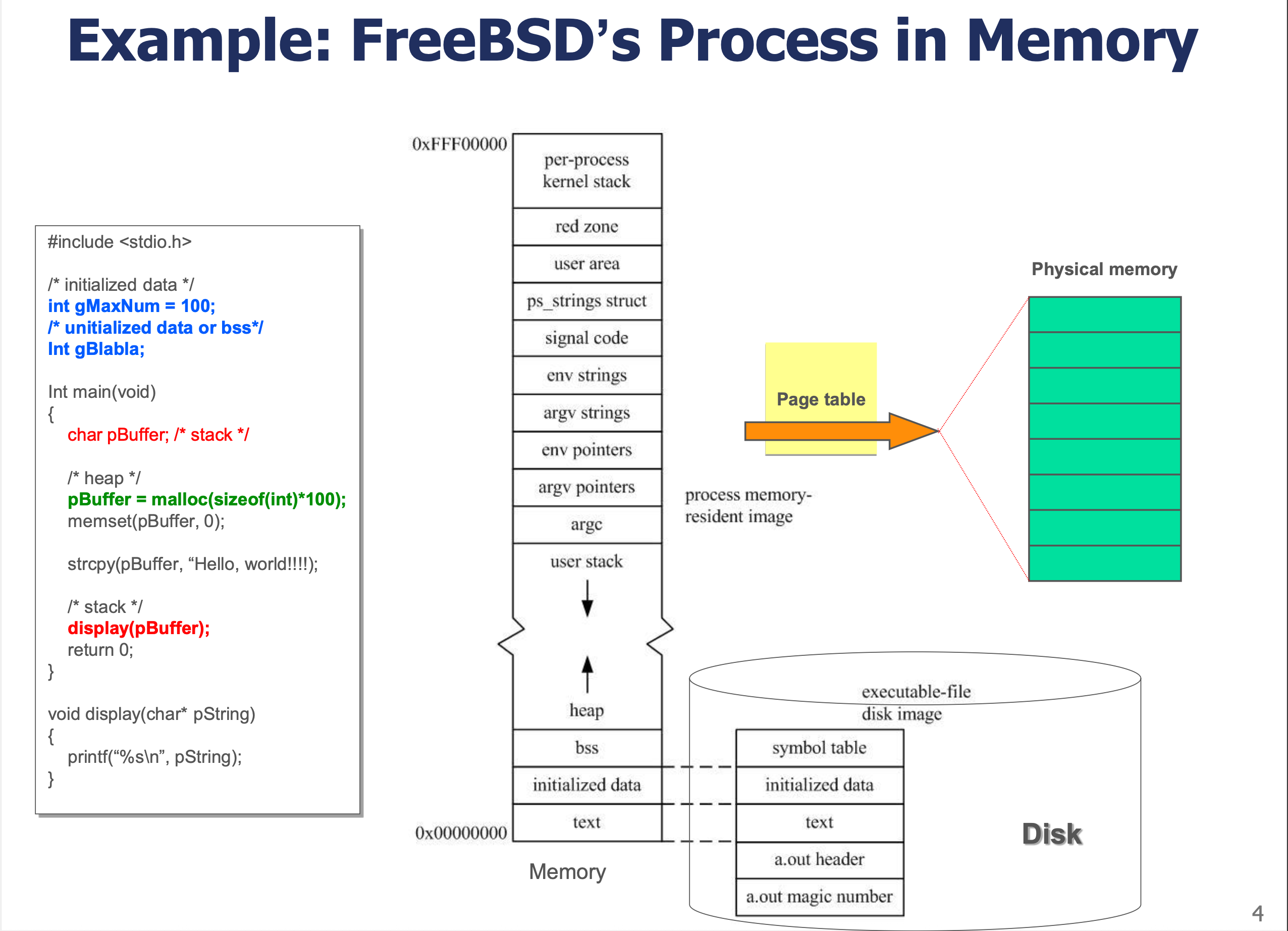
프로세스 개념 (Process Concept)
운영체제가 실행하는 프로그램의 종류
- 운영체제는 다양한 프로그램을 실행한다.
| 시스템 유형 | program | 설명 |
|---|---|---|
| 일괄 처리 시스템 | 작업(jobs) | 여러 작업을 한꺼번에 모아서 순차적으로 처리하는 방식 |
| 시분할 시스템 | 사용자 프로그램 또는 태스크(user programs or tasks) | 여러 사용자가 동시에 시스템을 공유하는 방식 |
- 프로그램이란?
- 프로그램은 수동적 개체(passive entity)이다. 디스크에 저장된 명령어 목록을 담고 있는 파일과 같다.
- 프로그램 자체는 프로세스가 아니다.
프로그램은 디스크에 가만히 저장되어 있는 파일일 뿐이다. 아직 실행되지 않은 상태이다.
-
UNIX 프로세스란 정확히 무엇인가?
- 프로세스는 실행 중인 프로그램의 인스턴스(instance)이며, 실행 중인 프로그램이다.
- 비유: 프로그램은 요리 레시피(책)이고, 프로세스는 그 레시피대로 실제로 요리하고 있는 행위이다. 같은 프로그램에서 여러 프로세스가 만들어질 수 있다 (예: 크롬 브라우저 탭 여러 개).
- 다음에 실행할 명령어를 지정하는 프로그램 카운터와 자원(메모리, 파일, 소켓 등)의 집합을 가진 능동적 개체(active entity)이다.
- 프로세스는 실행 중인 프로그램의 인스턴스(instance)이며, 실행 중인 프로그램이다.
-
프로세스는 가상 주소 공간과 제어 정보로 구성된다
- 가상 주소 공간: 각 프로세스가 자신만의 독립적인 메모리 공간을 가진 것처럼 보이는 메커니즘 제어 정보: 프로세스 상태, 우선순위, 열린 파일 목록 등 OS가 프로세스를 관리하기 위한 정보
핵심 포인트: 프로그램 = 디스크에 저장된 정적 파일(수동적), 프로세스 = 메모리에 올라가 실행 중인 동적 상태(능동적). 같은 프로그램에서 여러 프로세스가 생성될 수 있다.
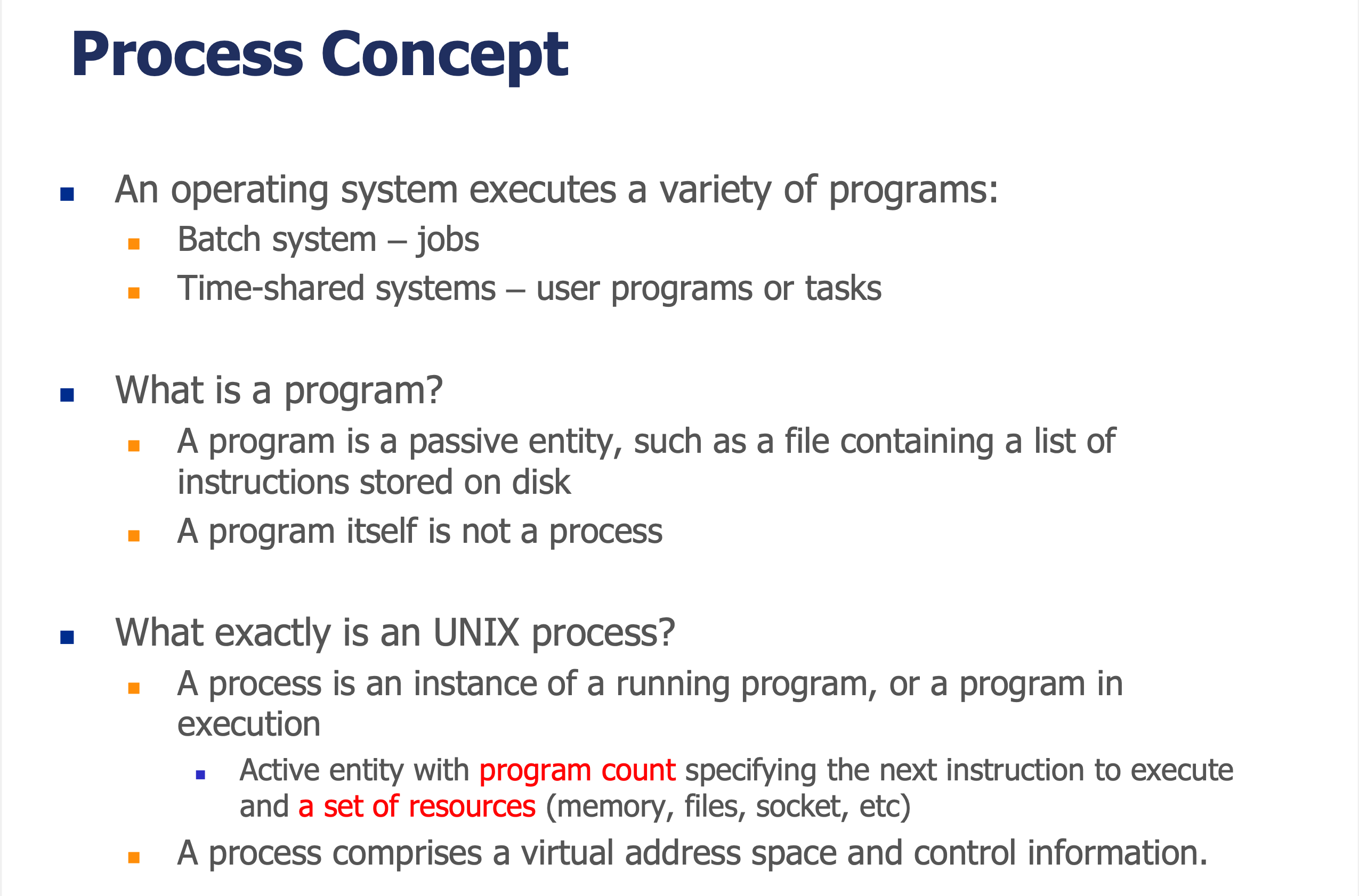
메모리 내 프로세스 (Process in Memory)
-
좌측: 메모리(Memory)
- 메모리 안에 두 개의 프로세스가 올라가 있다: Internet Explorer(분홍색)와 Word(연두색).
- 디스크(Disk)에 있던 "word" 프로그램이 화살표를 통해 메모리로 로드되는 과정을 보여준다.
-
우측: 프로세스의 메모리 레이아웃(주소 공간)
- 주소 0(최하위)부터 max(최상위)까지:
max ┌─────────────┐ │ stack │ ← 스택: 위에서 아래로 성장 (↓) │ ↓ │ │ │ ← 빈 공간 (스택과 힙 사이) │ ↑ │ │ heap │ ← 힙: 아래에서 위로 성장 (↑) ├─────────────┤ │ data │ ← 데이터 섹션 ├─────────────┤ │ text │ ← 텍스트(코드) 섹션 0 └─────────────┘
-
Process에 포함되는 것
| 구성 | 상세 설명 |
|---|---|
| program counter | 다음에 실행할 명령어의 주소를 가리키는 레지스터 |
| stack | 함수 호출 시 매개변수, 지역 변수, 리턴 주소가 저장되는 영역. 함수 호출이 중첩되면 스택이 아래로 자란다 |
| data section | 전역 변수와 정적 변수가 저장되는 영역 |
| Control information | PCB에 저장되는 프로세스 관리 정보 |
- 추가로 그림에 보이는 영역들:
- text (코드): 프로그램의 실행 가능한 기계어 코드가 저장
- heap (힙): 동적 메모리 할당(malloc, new)을 위한 영역. 아래에서 위로 자란다
- 스택과 힙은 서로 반대 방향으로 자라며, 두 영역이 만나면 메모리 부족 상태가 된다
핵심 포인트: 프로세스의 메모리는 text(코드) → data(전역변수) → heap(동적할당, ↑성장) → stack(함수호출, ↓성장)의 구조를 가진다. 프로그램이 디스크에서 메모리로 로드되면 프로세스가 된다.
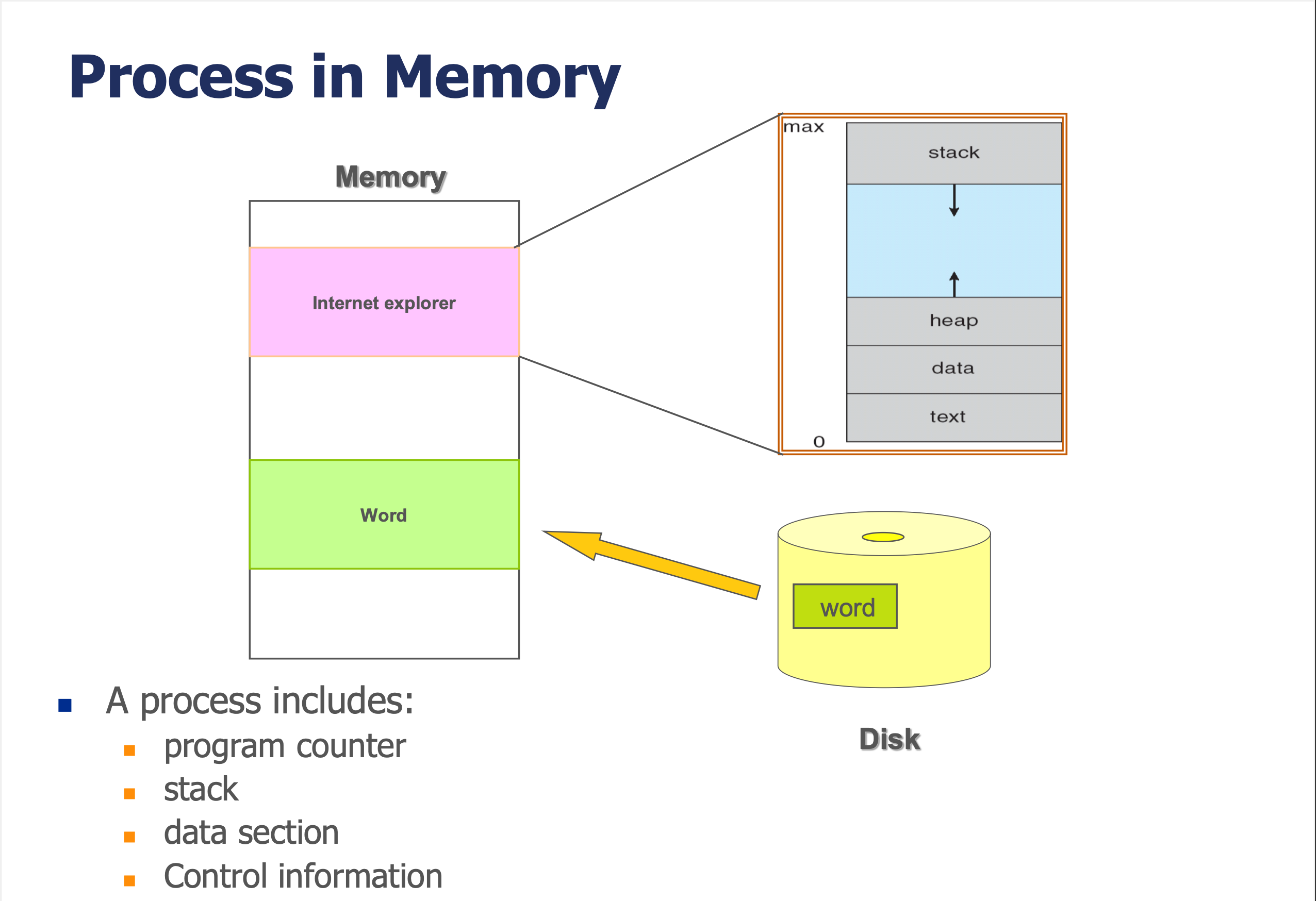
FreeBSD 프로세스의 메모리 예제 (Example: FreeBSD's Process in Memory)
소스 코드와 메모리 매핑
- 좌측의 C 소스 코드가 우측의 메모리 레이아웃에 어떻게 매핑되는지 보여준다.
디스크 → 메모리 로딩 과정 (그림 우측)
디스크에 저장된 실행 파일(executable-file disk image)의 구조:
a.out magic number ← 실행 파일 식별자
a.out header ← 각 섹션의 크기 정보
text ← 코드 섹션
initialized data ← 초기화된 데이터
symbol table ← 심볼 테이블 (디버깅용)이 파일이 메모리에 로드되면:
- text → 메모리의 text 영역으로
- initialized data → 메모리의 initialized data 영역으로
- bss는 디스크에 저장되지 않고 메모리에서 0으로 채워진다
페이지 테이블 (Page Table)
그림 중앙의 Page table 화살표는 가상 주소를 물리 메모리(Physical memory)로 변환하는 과정을 보여준다.
- 프로세스가 사용하는 주소(가상 주소)는 실제 물리 메모리 주소와 다르다.
- 페이지 테이블이 가상 주소 → 물리 주소 매핑을 담당한다.
- 이를 통해 각 프로세스는 자신만의 독립된 주소 공간을 가진 것처럼 보인다.
핵심 포인트: C 코드의 각 요소(전역 변수, 지역 변수, 동적 할당)가 메모리의 어느 영역에 저장되는지 정확히 이해하는 것이 중요하다. bss는 초기화되지 않은 전역 변수 영역으로 디스크에 저장하지 않아 실행 파일 크기를 줄인다.
프로세스 상태 (Process State)
5가지 프로세스 상태
- 프로세스가 실행됨에 따라 상태가 변화한다.
| 상태 | 원문 | 한국어 | 상세 설명 |
|---|---|---|---|
| new | The process is being created | 프로세스가 생성 중 | fork() 등으로 프로세스가 막 만들어지고 있는 단계 |
| running | Instructions are being executed | 명령어가 실행 중 | CPU를 할당받아 실제로 코드가 실행되고 있는 상태 |
| waiting | The process is waiting for some event to occur | 어떤 이벤트가 발생하기를 기다리는 중 | I/O 완료, 시그널 수신 등을 기다리는 상태. CPU를 사용하지 않는다 |
| ready | The process is waiting to be assigned to a processor | 프로세서에 할당되기를 기다리는 중 | 실행 준비가 되었지만 CPU가 다른 프로세스를 실행 중이라 대기 |
| terminated | The process has finished execution | 실행이 끝남 | exit() 호출 등으로 프로세스가 종료된 상태 |
| 전이 | 원인 | 한국어 설명 |
|---|---|---|
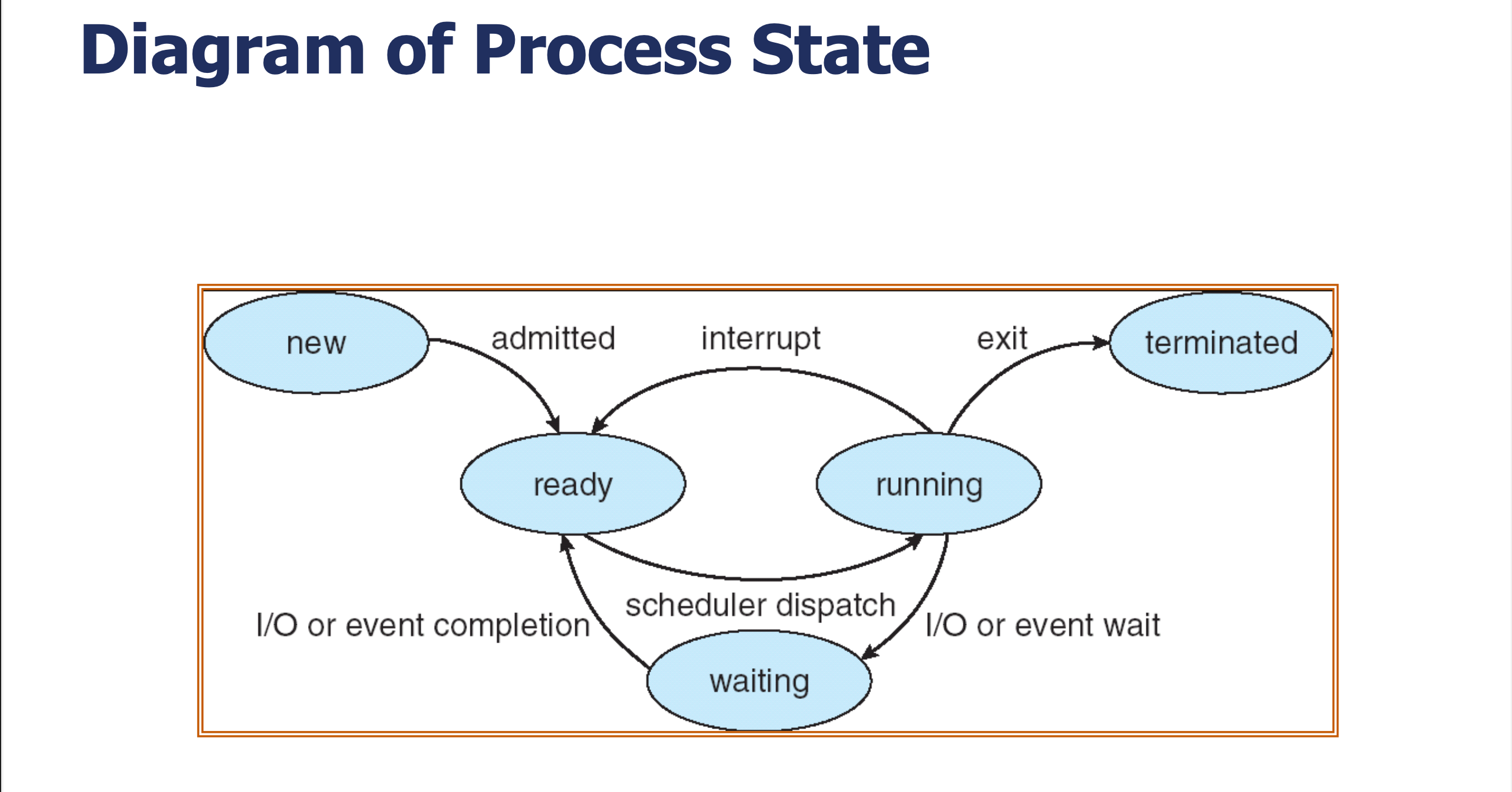
| new → ready | admitted (승인됨) | OS가 프로세스를 승인하여 준비 큐에 넣는다 |
| ready → running | scheduler dispatch (스케줄러 디스패치) | CPU 스케줄러가 이 프로세스를 선택하여 CPU를 할당한다 |
| running → ready | interrupt (인터럽트) | 타임 슬라이스 만료 등 인터럽트로 CPU를 빼앗긴다 |
| running → waiting | I/O or event wait (I/O 또는 이벤트 대기) | I/O 요청, sleep() 등으로 이벤트를 기다린다 |
| waiting → ready | I/O or event completion (I/O 또는 이벤트 완료) | 기다리던 이벤트가 완료되어 다시 실행 준비 상태가 된다 |
| running → terminated | exit (종료) | 프로세스가 실행을 마치고 종료한다 |
주의: waiting → running으로 직접 전이는 없다. 반드시 waiting → ready → running 순서이다. 즉, I/O가 끝나도 바로 실행되지 않고 준비 큐에서 자기 차례를 기다려야 한다.
핵심 포인트: 프로세스는 new → ready → running → terminated의 기본 흐름을 따르며, running 중 I/O가 필요하면 waiting으로, 타임 슬라이스가 만료되면 ready로 돌아간다.
Unix/BSD 프로세스 상태 (Example: Unix/BSD process state)
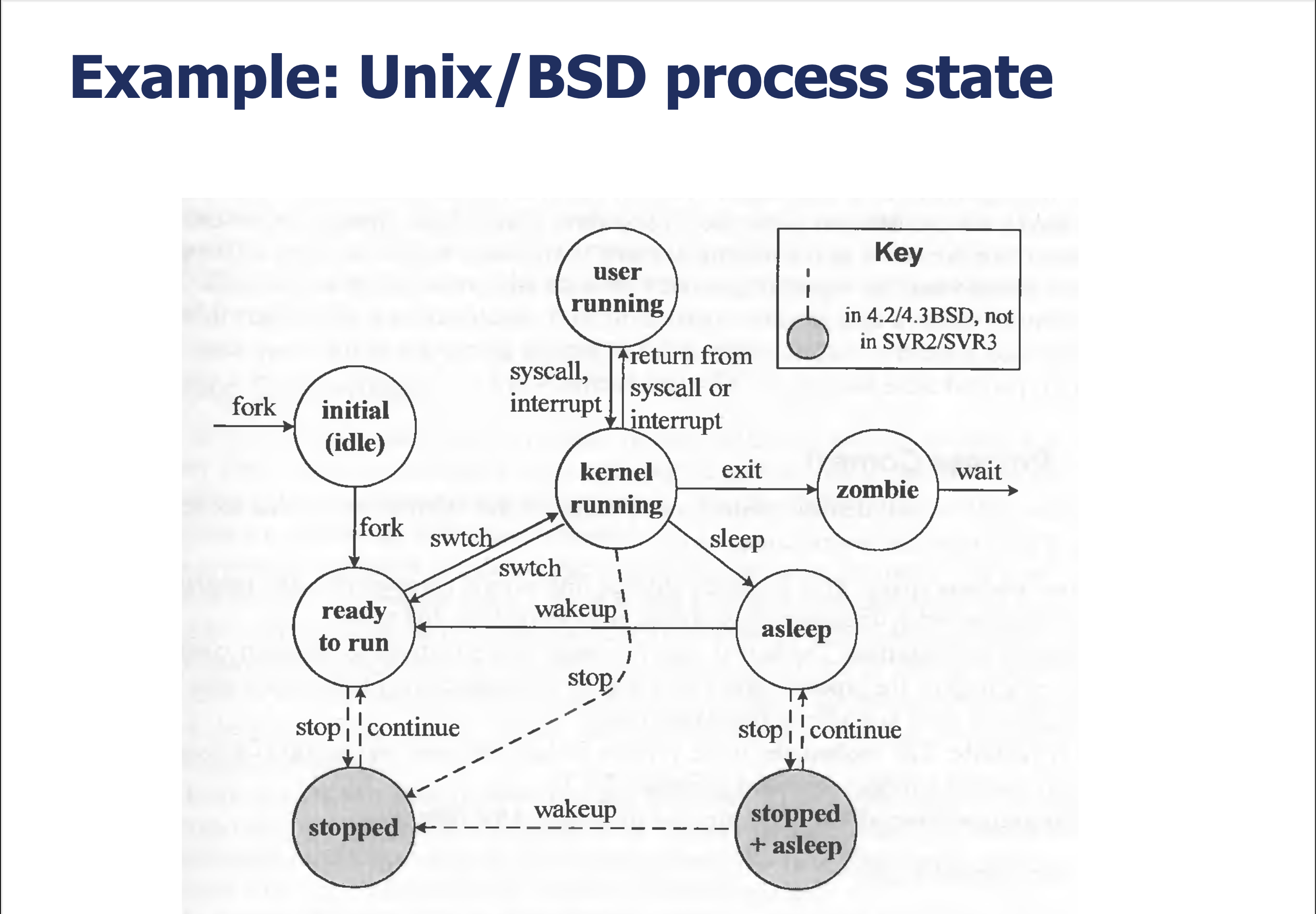
- 실제 Unix/BSD에서는 교과서보다 더 세분화된 프로세스 상태가 있다.
상태 다이어그램 상세 설명
| 상태 | 한국어 | 설명 |
|---|---|---|
| initial (idle) | 초기(유휴) | fork()로 프로세스가 막 생성된 상태 |
| user running | 사용자 모드 실행 | 사용자 모드에서 코드가 실행 중 |
| kernel running | 커널 모드 실행 | 시스템 콜이나 인터럽트로 커널 코드가 실행 중 |
| ready to run | 실행 준비 | CPU 할당을 기다리는 상태 |
| asleep | 수면 | I/O 등 이벤트를 기다리며 잠든 상태 (= waiting) |
| zombie | 좀비 | exit()했지만 부모가 wait()하지 않아 정보만 남은 상태 |
| stopped | 정지 | SIGSTOP 시그널로 일시 정지된 상태 |
| stopped + asleep | 정지 + 수면 | 정지 상태에서 동시에 수면 중인 상태 |
주요 전이
- user running → kernel running: syscall(시스템 콜)이나 interrupt(인터럽트) 발생 시
- kernel running → user running: syscall이나 interrupt에서 return(반환) 시
- kernel running → asleep: sleep() 호출이나 I/O 대기 시
- asleep → ready to run: wakeup() 호출로 깨어남
- kernel running → zombie: exit() 호출 시
- zombie → (제거): 부모의 wait() 호출 시
- ready to run ↔ stopped: stop(SIGSTOP) / continue(SIGCONT) 시그널로 전환
핵심 포인트: 실제 Unix에서는 user running과 kernel running을 구분하며, 좀비(zombie)와 정지(stopped) 상태가 추가된다. 좀비는 프로세스가 종료되었지만 부모가 아직 회수하지 않은 상태이다.
프로세스 제어 블록 (Process Control Block, PCB)
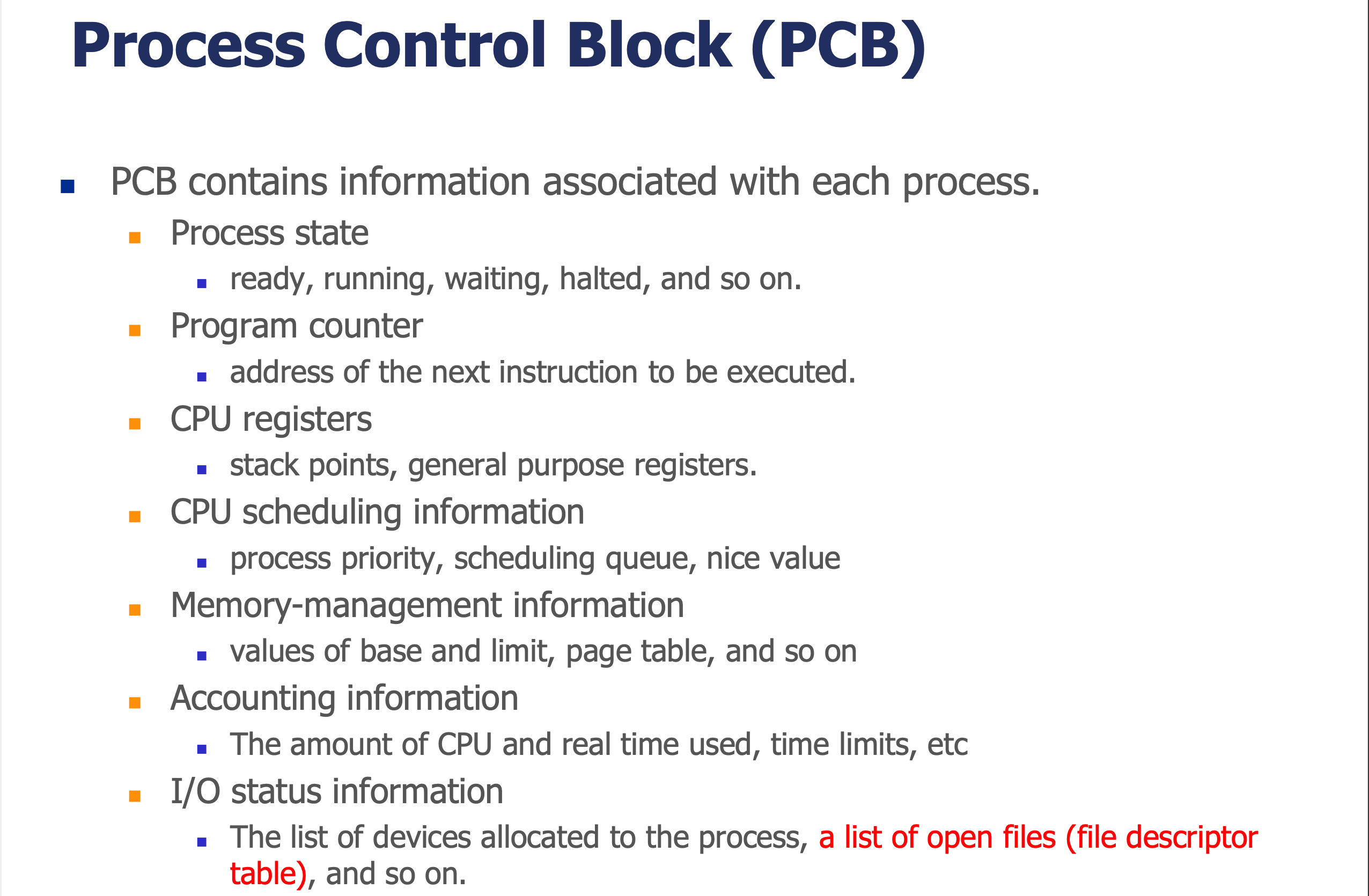
- PCB는 각 프로세스에 연관된 정보를 담고 있다.
PCB의 구성 요소
| 항목 | 원문 | 한국어 | 상세 설명 |
|---|---|---|---|
| Process state | ready, running, waiting, halted, and so on | 프로세스 상태 | 현재 프로세스가 어떤 상태인지 |
| Program counter | address of the next instruction to be executed | 프로그램 카운터 | 다음에 실행할 명령어의 주소 |
| CPU registers | stack points, general purpose registers | CPU 레지스터 | 스택 포인터, 범용 레지스터 등의 값 |
| CPU scheduling information | process priority, scheduling queue, nice value | CPU 스케줄링 정보 | 프로세스 우선순위, 스케줄링 큐 위치, nice 값 |
| Memory-management information | values of base and limit, page table, and so on | 메모리 관리 정보 | base/limit 레지스터 값, 페이지 테이블 등 |
| Accounting information | The amount of CPU and real time used, time limits, etc | 계정 정보 | 사용한 CPU 시간, 실제 경과 시간, 시간 제한 등 |
| I/O status information | The list of devices allocated to the process, a list of open files (file descriptor table) | I/O 상태 정보 | 할당된 장치 목록, 열린 파일 목록(파일 디스크립터 테이블) |
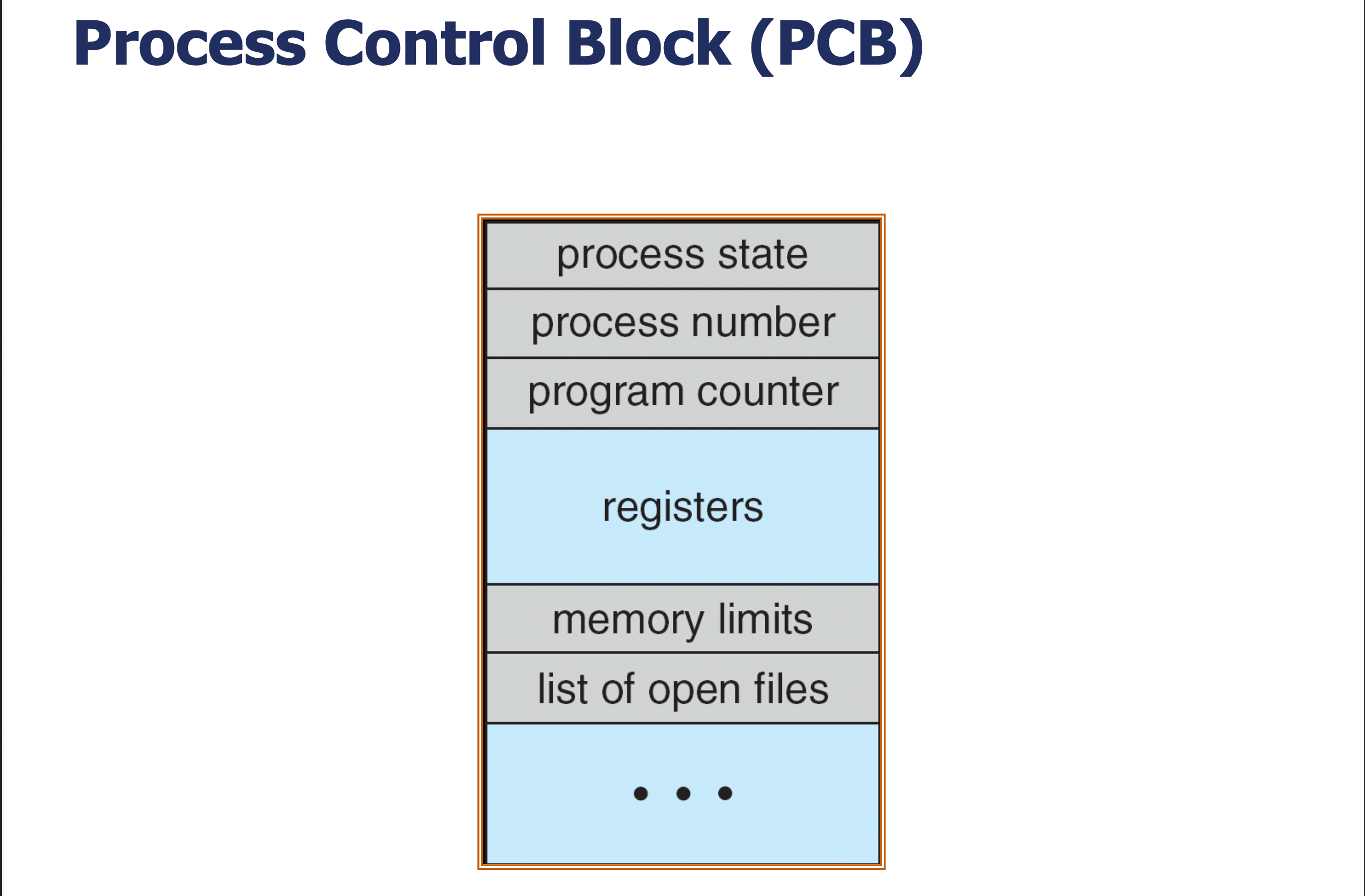
PCB 구조
┌──────────────────┐
│ process state │ ← ready, running, waiting 등
├──────────────────┤
│ process number │ ← PID (프로세스 식별자)
├──────────────────┤
│ program counter │ ← 다음 실행할 명령어 주소
├──────────────────┤
│ │
│ registers │ ← CPU 레지스터 값들
│ │
├──────────────────┤
│ memory limits │ ← 메모리 범위 정보
├──────────────────┤
│list of open files│ ← 열린 파일 목록
├──────────────────┤
│ ... │ ← 기타 정보
└──────────────────┘- PCB는 커널 메모리에 존재하며, 프로세스마다 하나씩 있다.
- 문맥 전환(context switch) 시 현재 프로세스의 PCB를 저장하고, 새 프로세스의 PCB를 로드한다.
핵심 포인트: PCB는 프로세스의 "신분증"이다. OS는 PCB를 통해 프로세스의 모든 상태 정보를 관리하며, 문맥 전환 시 PCB를 저장/복원하여 프로세스가 중단된 지점에서 다시 실행될 수 있게 한다.
Unix/BSD PCB 예제 (Example: Unix/BSD PCB)
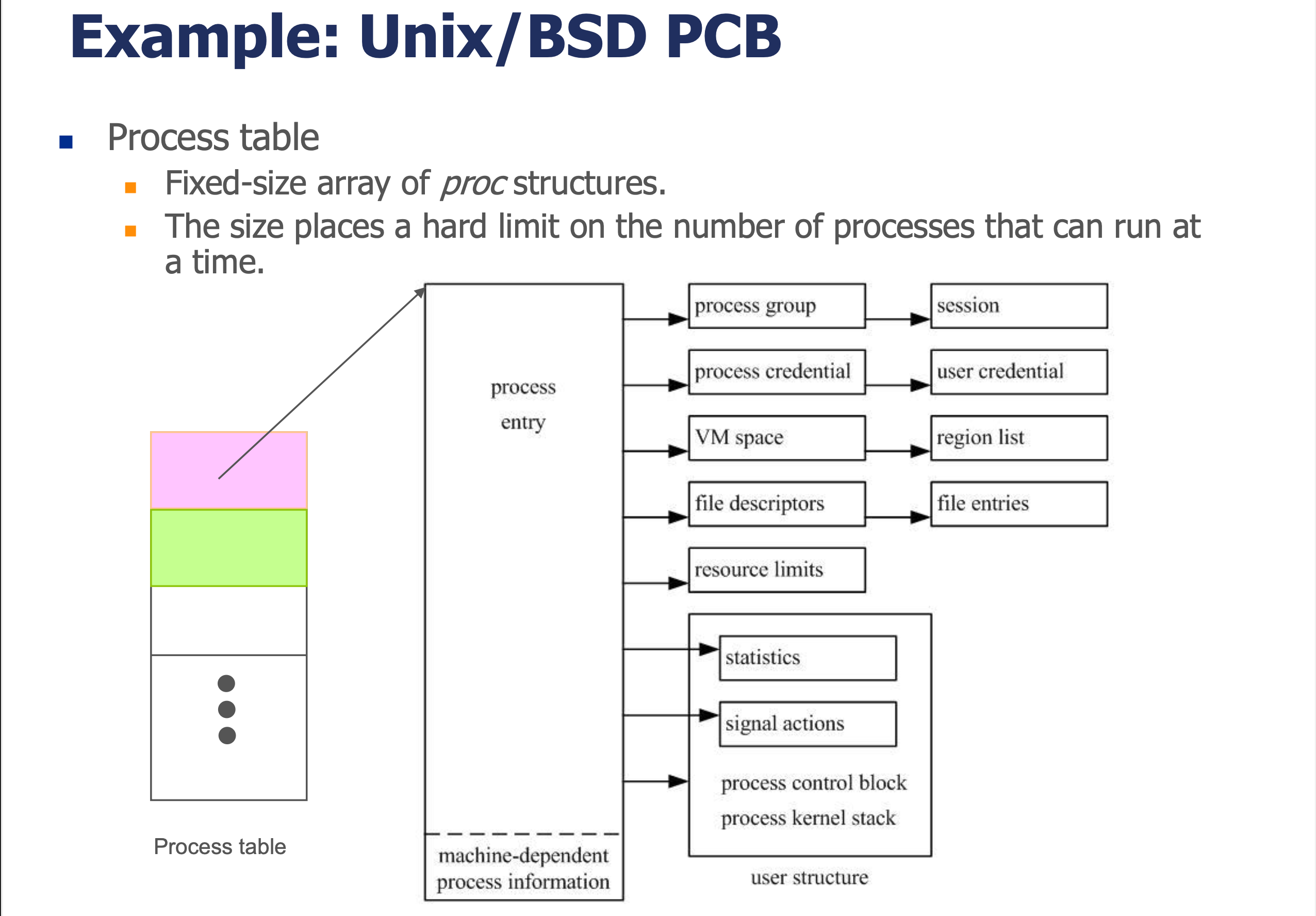
프로세스 테이블 (Process Table)
- proc 구조체의 고정 크기 배열이다.
- 이 크기가 동시에 실행할 수 있는 프로세스 수의 상한선(hard limit)을 결정한다.
그림 설명: proc 구조체(process entry)의 포인터 관계
각 항목 설명:
| 항목 | 한국어 | 설명 |
|---|---|---|
| process group | 프로세스 그룹 | 시그널을 함께 받는 프로세스 그룹 → 세션(session)과 연결 |
| process credential | 프로세스 자격 증명 | 프로세스의 권한 정보 → 사용자 자격 증명(user credential)과 연결 |
| VM space | 가상 메모리 공간 | 프로세스의 가상 주소 공간 → 영역 리스트(region list)와 연결 |
| file descriptors | 파일 디스크립터 | 열린 파일 정보 → 파일 엔트리(file entries)와 연결 |
| resource limits | 자원 제한 | CPU 시간, 메모리 등의 사용 제한 |
| statistics | 통계 | CPU 사용량 등 통계 정보 |
| signal actions | 시그널 동작 | 각 시그널에 대한 핸들러 지정 |
| process control block | 프로세스 제어 블록 | 레지스터, PC 등 하드웨어 문맥 |
| process kernel stack | 프로세스 커널 스택 | 시스템 콜 실행 시 사용하는 커널 스택 |
핵심 포인트: 실제 Unix에서 프로세스는 단순한 PCB가 아니라, 여러 하위 구조체들의 포인터 네트워크로 이루어져 있다. 프로세스 테이블의 크기가 최대 프로세스 수를 결정한다.
프로세스 스케줄링 (Process Scheduling)
다중프로그래밍 (Multiprogramming) 정의
- 항상 어떤 프로세스가 실행되도록 하여 CPU 활용률을 극대화한다.
- 시나리오:
- 여러 프로그램이 일괄적으로 메모리에 올라가고, 첫 번째 프로그램이 실행을 시작한다.
- 첫 번째 프로그램이 주변장치를 기다리는 명령에 도달하면, 이 프로그램의 문맥이 저장되고 메모리의 두 번째 프로그램이 실행 기회를 얻는다. 모든 프로그램이 끝날 때까지 이 과정이 반복된다.
시분할 (Time-sharing) 정의
- 많은 사용자가 컴퓨터를 동시에 공유할 수 있게 한다. 각 사용자에게 약간의 CPU 시간만 필요하다. 각 사용자는 전체 컴퓨터 시스템이 자신만을 위해 전용되고 있다는 인상을 받는다.
프로세스 스케줄링 예시
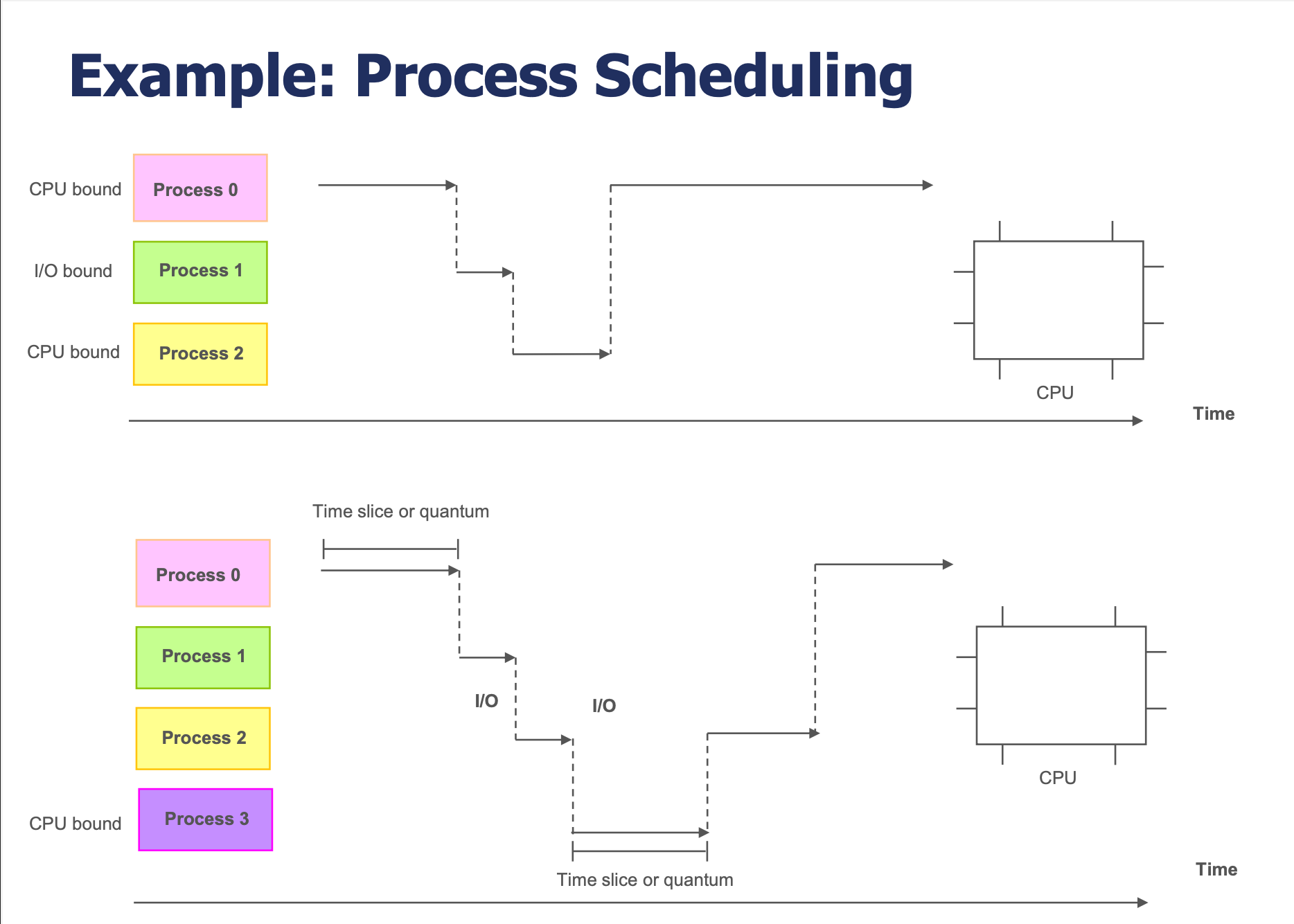
상단 그림 (다중프로그래밍):
- Process 0이 CPU를 사용하다가 → I/O가 필요하면 → Process 1이 CPU를 받는다 → I/O가 끝나면 → Process 0이 다시 CPU를 받는다
하단 그림 (시분할/타임 슬라이스):
- 타임 슬라이스(time quantum) 단위로 프로세스들이 번갈아 CPU를 사용한다.
- 각 프로세스는 정해진 시간만큼만 CPU를 사용하고, 시간이 만료되면 다음 프로세스에게 넘긴다.
핵심 포인트: 다중프로그래밍은 I/O 대기 시 CPU를 다른 프로세스에 넘기는 것이고, 시분할은 정해진 시간 단위(타임 슬라이스)로 CPU를 번갈아 사용하는 것이다.
프로세스 간 CPU 전환 (CPU Switch From Process to Process)
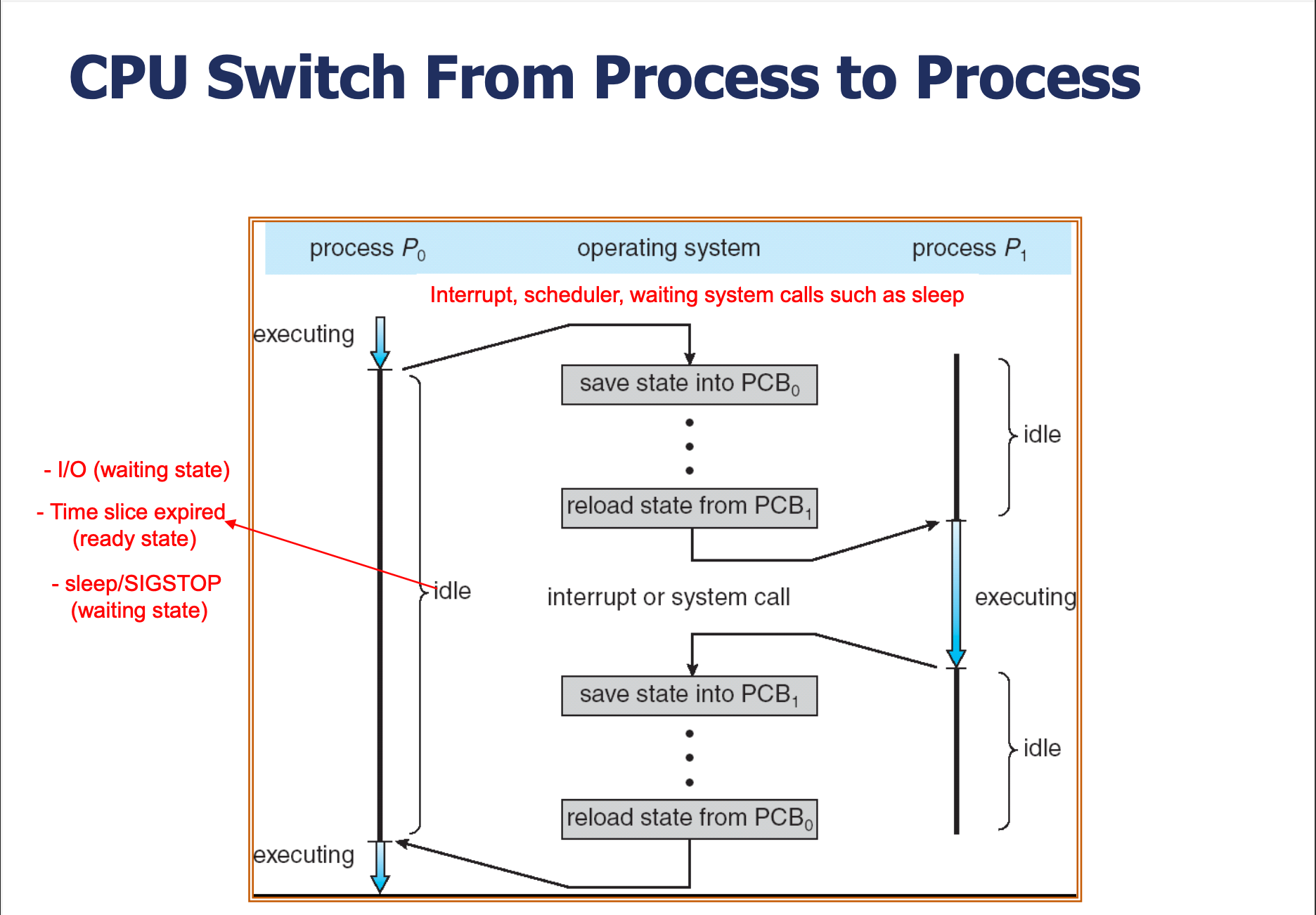
CPU 전환이 발생하는 3가지 이유 (좌측 빨간 텍스트)
- I/O (waiting state): I/O 요청으로 대기 상태로 전환
- Time slice expired (ready state): 타임 슬라이스 만료로 준비 상태로 전환
- sleep/SIGSTOP (waiting state): sleep() 호출이나 SIGSTOP 시그널로 대기 상태로 전환
전환 과정 상세
| 단계 | 동작 | 한국어 설명 |
|---|---|---|
| 1 | P₀ executing | P₀가 CPU에서 실행 중 |
| 2 | Interrupt/system call 발생 | 인터럽트나 시스템 콜이 발생 |
| 3 | save state into PCB₀ | P₀의 현재 상태(레지스터, PC 등)를 PCB₀에 저장 |
| 4 | 스케줄러가 다음 프로세스 P₁ 선택 | OS의 스케줄러가 준비 큐에서 P₁을 선택 |
| 5 | reload state from PCB₁ | P₁의 저장된 상태를 PCB₁에서 로드 |
| 6 | P₁ executing | P₁이 CPU에서 실행 시작 (이전에 중단된 지점부터) |
핵심 포인트: Context Switch의 핵심은 "현재 프로세스의 PCB 저장 → 새 프로세스의 PCB 로드"이다. 이 과정에서 CPU는 유용한 작업을 하지 못하므로 오버헤드가 된다.
프로세스 스케줄링 큐 (Process Scheduling Queues)
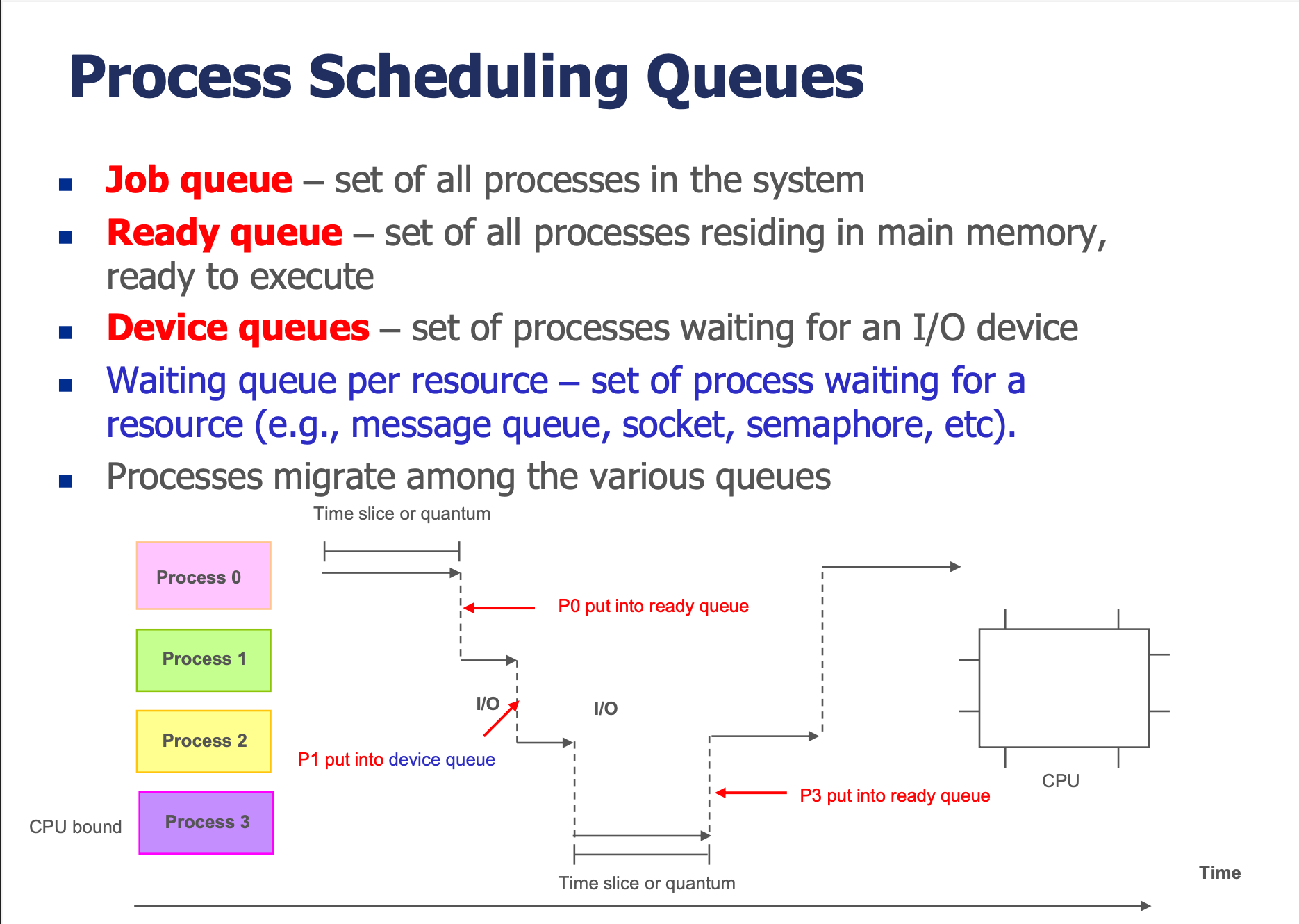
4가지 큐
| 큐 | 원문 | 설명 |
|---|---|---|
| Job queue | Set of all processes in the system | 시스템 내 모든 프로세스의 집합 |
| Ready queue | Set of all processes residing in main memory, ready to execute | 메인 메모리에 있으며 실행 준비된 프로세스의 집합 |
| Device queues | Set of processes waiting for an I/O device | I/O 장치를 기다리는 프로세스의 집합 |
| Waiting queue per resource | Set of processes waiting for a resource (e.g., message queue, socket, semaphore, etc) | 특정 자원(메시지 큐, 소켓, 세마포어 등)을 기다리는 프로세스 |
- 프로세스들은 다양한 큐들 사이를 이동(migrate)한다.
Ready Queue와 I/O Device Queue
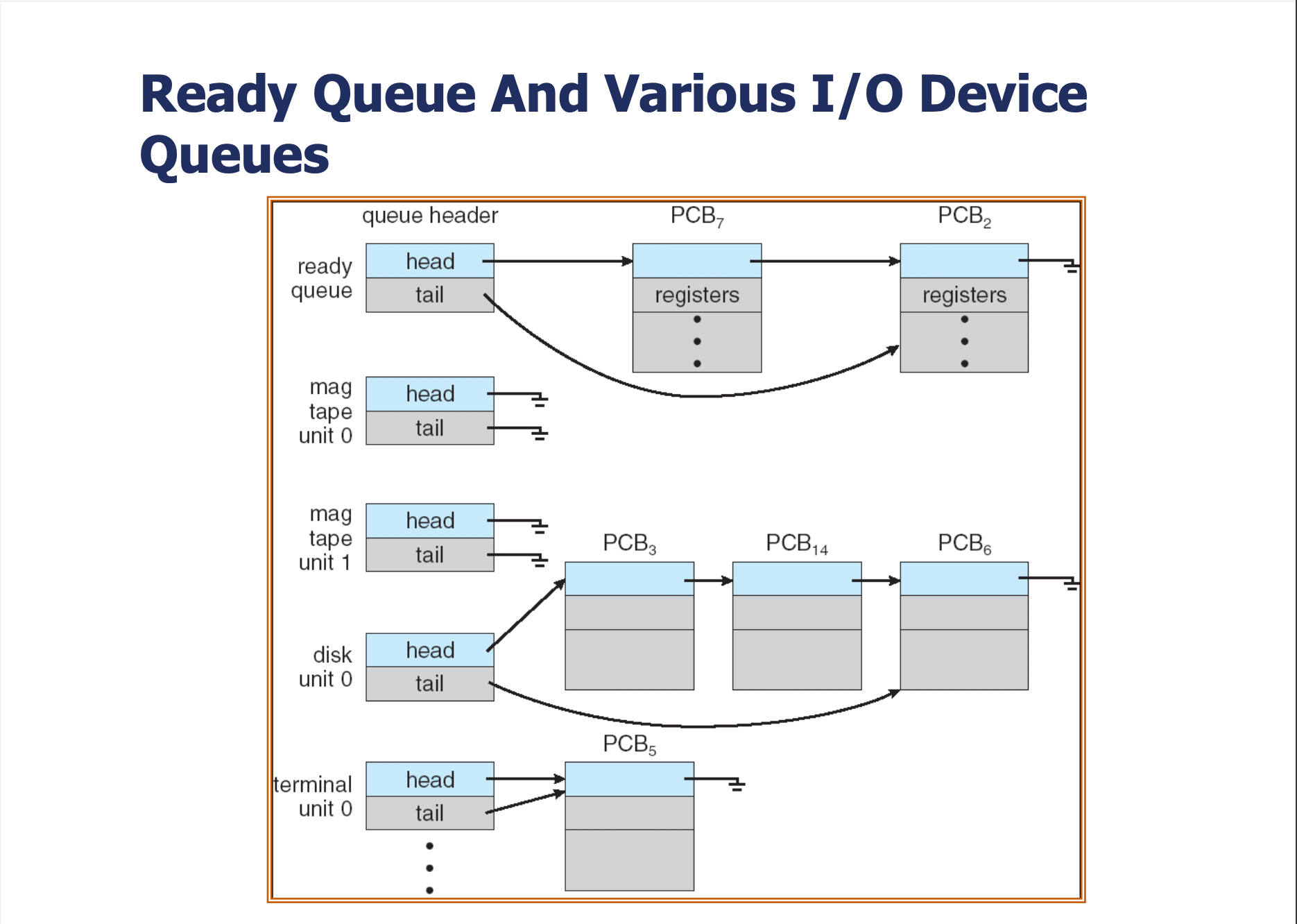
- 각 큐는 연결 리스트(linked list)로 구현되며, 큐 헤더에 head(첫 번째)와 tail(마지막) 포인터가 있다.
- 큐의 각 노드는 PCB이며, PCB 안에 레지스터 정보 등이 포함되어 있다.
- 준비 큐(ready queue)에는 PCB₇, PCB₂가 대기 중
- mag tape 1에는 PCB₃, PCB₁₄, PCB₆가 I/O를 기다리며 대기 중
프로세스 스케줄링 표현
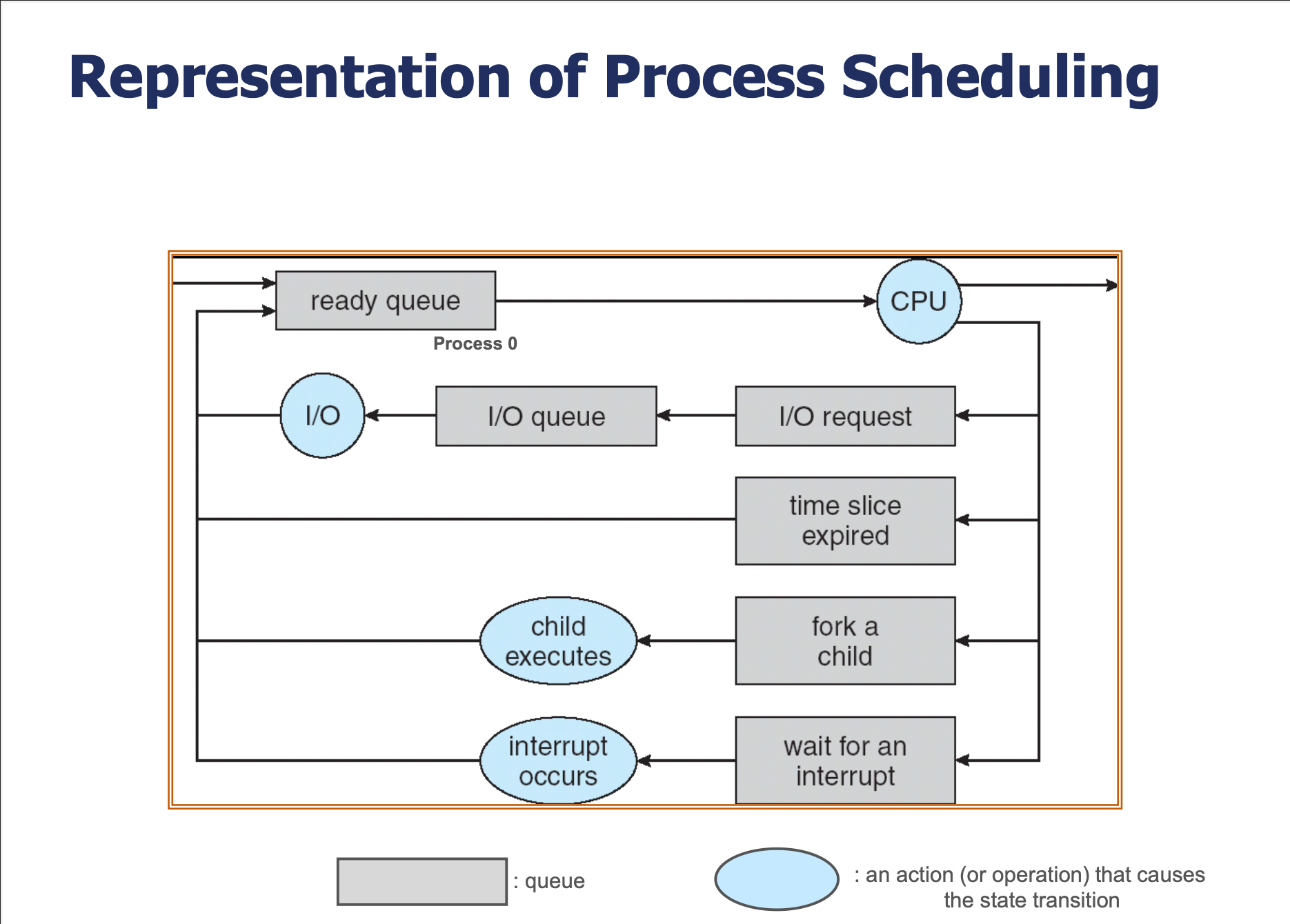
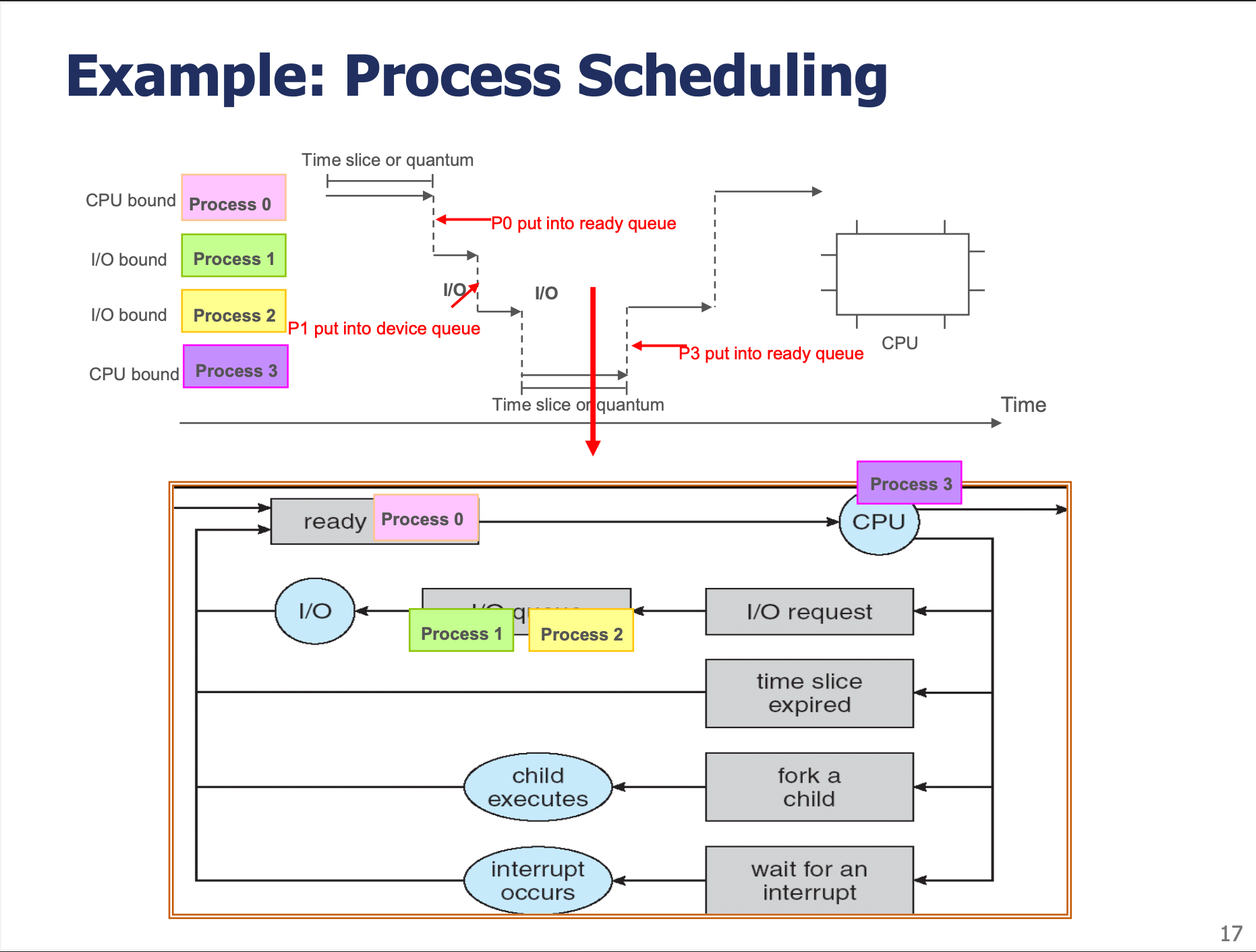
CPU를 사용한 후 발생할 수 있는 4가지 상황:
1. I/O request: I/O 요청 → I/O 큐에서 대기 → I/O 완료 후 ready queue로 복귀
2. time slice expired: 타임 슬라이스 만료 → 바로 ready queue로 복귀
3. fork a child: 자식 프로세스 생성 → 자식 실행 완료 후 ready queue로 복귀
4. wait for an interrupt: 인터럽트 대기 → 인터럽트 발생 후 ready queue로 복귀
핵심 포인트: 프로세스는 생명주기 동안 준비 큐, 장치 큐, 대기 큐 사이를 끊임없이 이동한다. 모든 경로는 결국 ready queue로 돌아온다.
스케줄러 (Schedulers)
장기 스케줄러 (Long-term scheduler / Job scheduler)
- 프로세스 풀에서 어떤 프로세스를 메모리로 가져와 준비 큐에 넣을지 선택한다.
- Unix/Windows 같은 현대 OS에서 이 스케줄러는 없거나 최소화되어 있다.
단기 스케줄러 (Short-term scheduler / CPU scheduler)
- 다음에 실행할 프로세스를 선택하고 CPU를 할당한다.
두 스케줄러의 차이
- 장기/단기 스케줄러의 차이 — 실행 빈도
| 스케줄러 | 실행 빈도 | 역할 |
|---|---|---|
| 장기 스케줄러 | 매우 드물게 (수 분에 한 번) | 디스크 → 메모리로 프로세스 로드 결정 |
| 단기 스케줄러 | 매우 자주 (수 밀리초마다) | CPU에 실행할 프로세스 선택 |
문맥 전환 (Context Switch)
What is Context Switch?
- 문맥은 프로세스 제어 블록(PCB)에 표현되며, CPU 레지스터의 값과 프로세스 상태를 포함한다.
문맥 전환 시 일어나는 연산
| 단계 | 한국어 |
|---|---|
| 1 | 현재 프로세스의 PCB를 저장 |
| 2 | 실행 예정인 새 프로세스의 저장된 PCB를 로드 |
| 3 | 캐시와 TLB가 리셋됨 |
- 문맥 전환 시마다 캐시와 TLB에서 매우 많은 미스(miss)가 발생한다.
- 새 프로세스의 데이터가 캐시/TLB에 없으므로, 전환 직후에는 성능이 일시적으로 저하된다.
- 문맥 전환 시간은 오버헤드이다. 전환하는 동안 시스템은 유용한 작업을 하지 못한다.
문맥 전환 구조
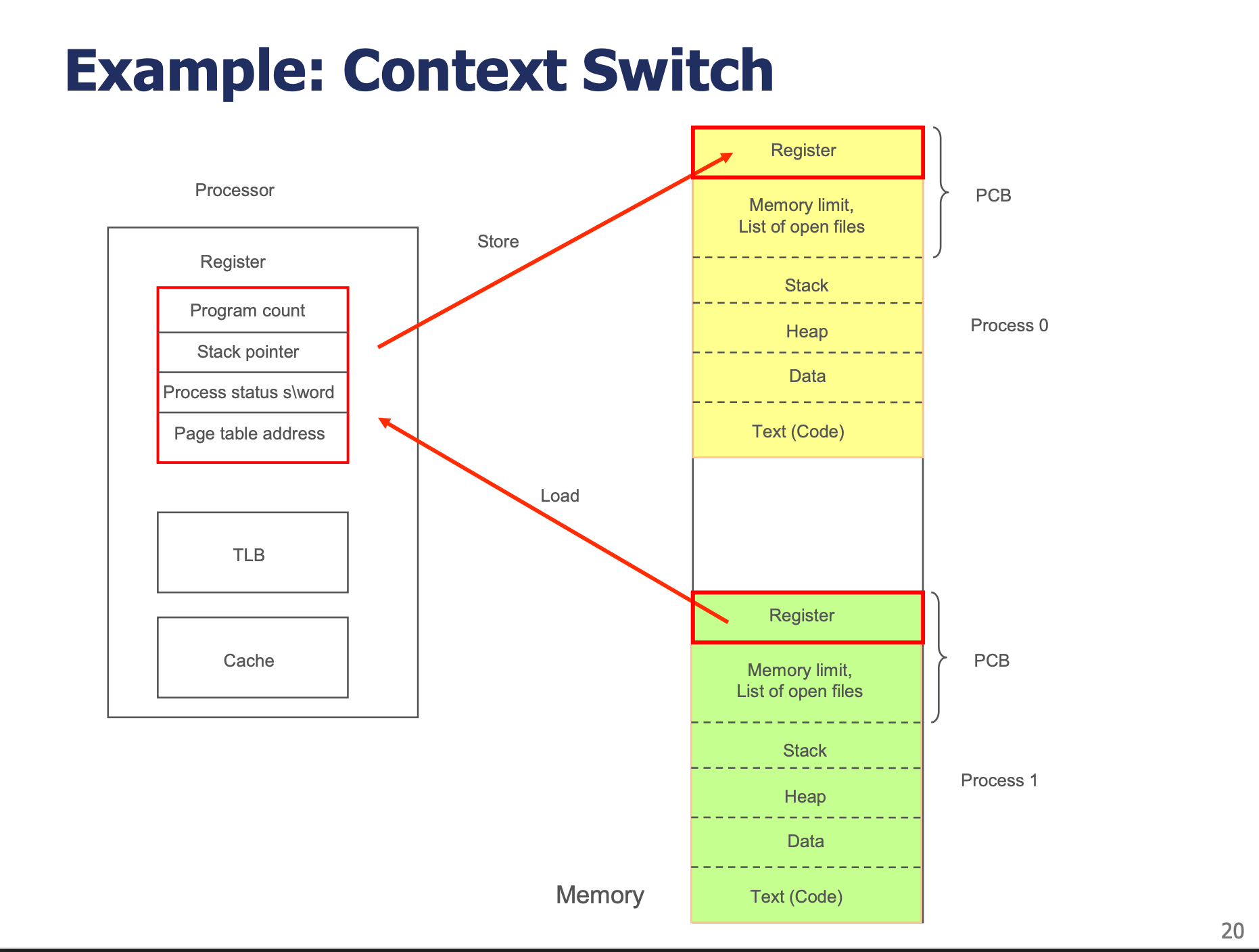
- Store: 현재 프로세스(P₀)의 레지스터, PC 등을 PCB₀에 저장
- Load: 새 프로세스(P₁)의 PCB₁에서 레지스터, PC 등을 프로세서에 로드
- TLB와 Cache는 리셋됨 (새 프로세스의 메모리 매핑으로 교체)
핵심 포인트: 문맥 전환 = PCB 저장 + PCB 로드 + 캐시/TLB 리셋. 전환 시간 자체는 순수한 오버헤드이므로, 너무 자주 전환하면 성능이 떨어진다.
프로세스 생성 (Process Creation)
프로세스 트리
- 부모 프로세스가 자식 프로세스를 생성하고, 자식이 다시 다른 프로세스를 생성하여 프로세스 트리를 형성한다.
- 프로세스는 고유한 프로세스 식별자(PID)로 식별된다.
자원 공유 옵션
| 원문 | 설명 |
|---|---|
| Parent and children share all resources | 부모와 자식이 모든 자원을 공유 |
| Children share subset of parent's resources | 자식이 부모 자원의 일부를 공유 |
| Parent and child share no resources | 부모와 자식이 자원을 공유하지 않음 |
실행 옵션
| 원문 | 설명 |
|---|---|
| Parent and children execute concurrently | 부모와 자식이 동시에 실행 |
| Parent waits until children terminate | 부모가 자식이 종료할 때까지 대기 |
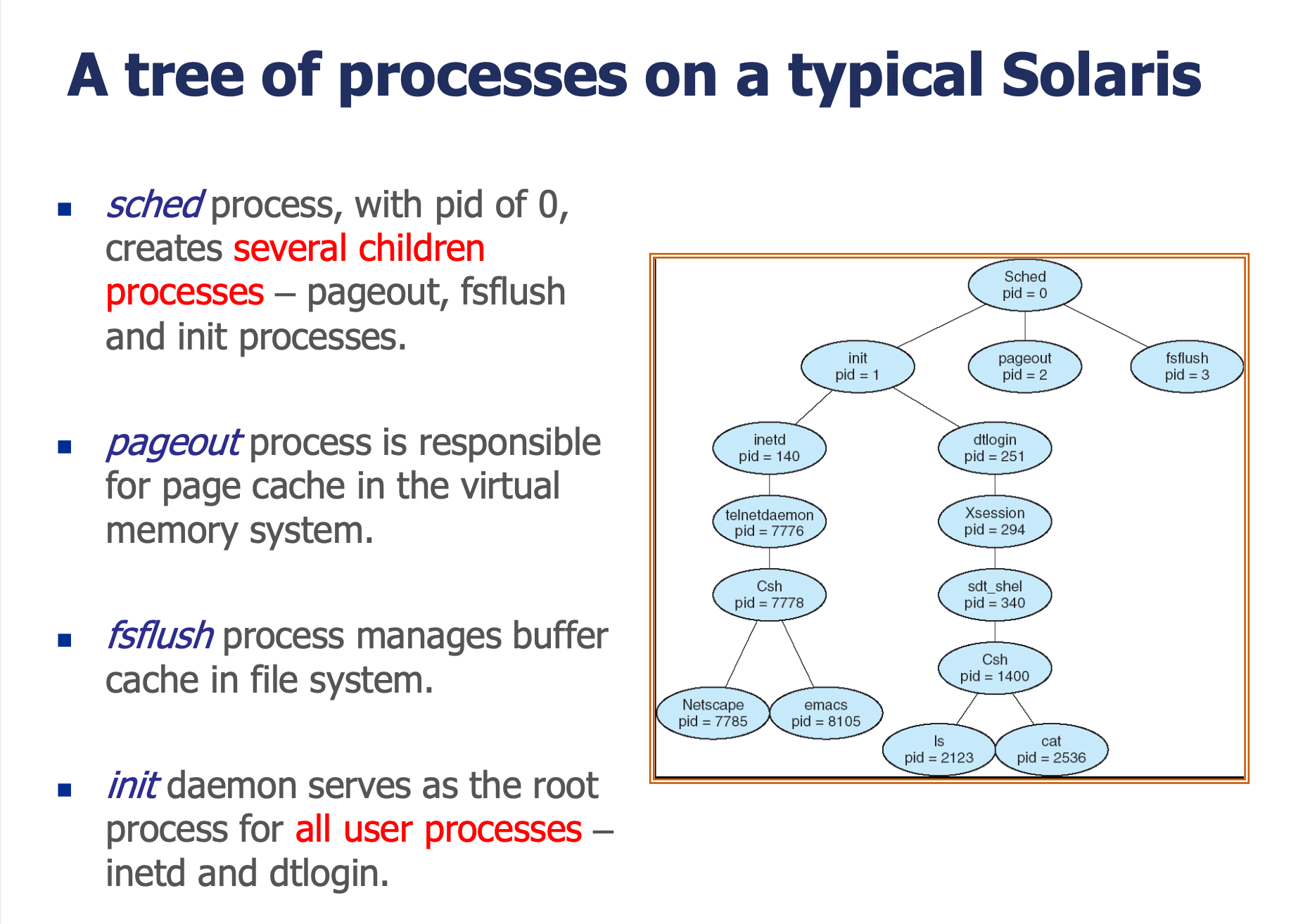
Solaris 프로세스 트리 그림
각 프로세스 설명:
- sched (pid=0): 스케줄러. 시스템의 최초 프로세스
- init (pid=1): 모든 사용자 프로세스의 루트. 부모가 죽은 고아 프로세스를 입양한다
- pageout (pid=2): 가상 메모리의 페이지 캐시를 담당
- fsflush (pid=3): 파일 시스템의 버퍼 캐시를 관리
fork()와 exec()
- 자식은 생성될 때 부모의 복제이다.
- 자식에 새 프로그램이 로드된다 — exec, execvp
UNIX에서의 프로세스 생성:
1. fork() 시스템 콜로 새 프로세스 생성 → 부모의 완전한 복사본
2. exec() 시스템 콜로 프로세스의 메모리 공간을 새 프로그램으로 교체
부모 프로세스 (bash)
│
fork() ──────→ 자식 프로세스 (bash의 복사본)
│ │
│ exec("ls")
│ │
│ 자식 프로세스 (ls 프로그램으로 변환됨)
│ │
wait() exit()
│◄───────────────────┘
(계속)프로세스 종료 (Process Termination)
정상 종료
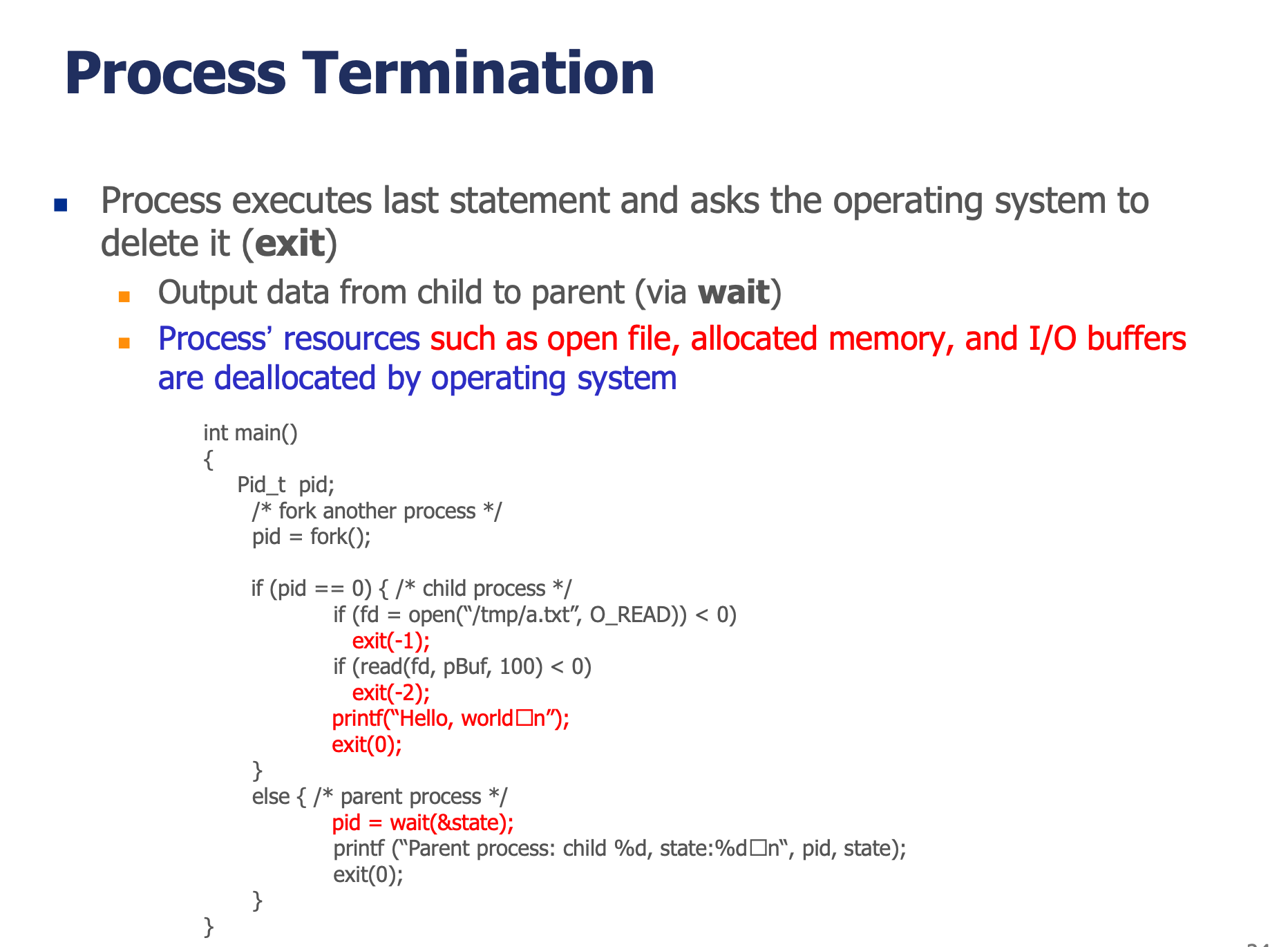
- 프로세스가 마지막 문장을 실행하고 OS에 삭제를 요청한다 (exit).
- 자식에서 부모로의 출력 데이터는 wait를 통해 전달된다.
- 열린 파일, 할당된 메모리, I/O 버퍼 등 프로세스의 자원은 OS가 회수(deallocate)한다.
int main()
{
pid_t pid;
pid = fork(); // 자식 프로세스 생성
if (pid == 0) { // ← 자식 프로세스 (fork()가 0을 반환)
fd = open("/tmp/a.txt", O_READ);
if (fd < 0) exit(-1); // 파일 열기 실패 시 종료
if (read(fd, pBuf, 100) < 0)
exit(-2); // 읽기 실패 시 종료
printf("Hello, world\n");
exit(0); // 정상 종료
}
else { // ← 부모 프로세스 (fork()가 자식의 PID를 반환)
pid = wait(&state); // 자식이 종료할 때까지 대기
printf("Parent: child %d, state:%d\n", pid, state);
exit(0);
}
}흐름:
1. fork()로 자식 프로세스 생성
2. 자식(pid==0): 파일을 열고, 읽고, "Hello, world" 출력 후 exit(0)
3. 부모(pid>0): wait(&state)로 자식의 종료를 기다림
4. 자식이 종료하면 부모가 종료 상태를 받아 출력
강제 종료 (abort)
- 부모가 자식 프로세스의 실행을 종료시킬 수 있다 (abort).
- 종료 사유:
- 자식이 할당된 자원을 초과한 경우
- 자식에 할당된 자원이 더 이상 필요하지 않은 경우
- 부모가 종료하는 경우 → 연쇄 종료(cascading termination): 부모 종료 시 모든 자식도 종료
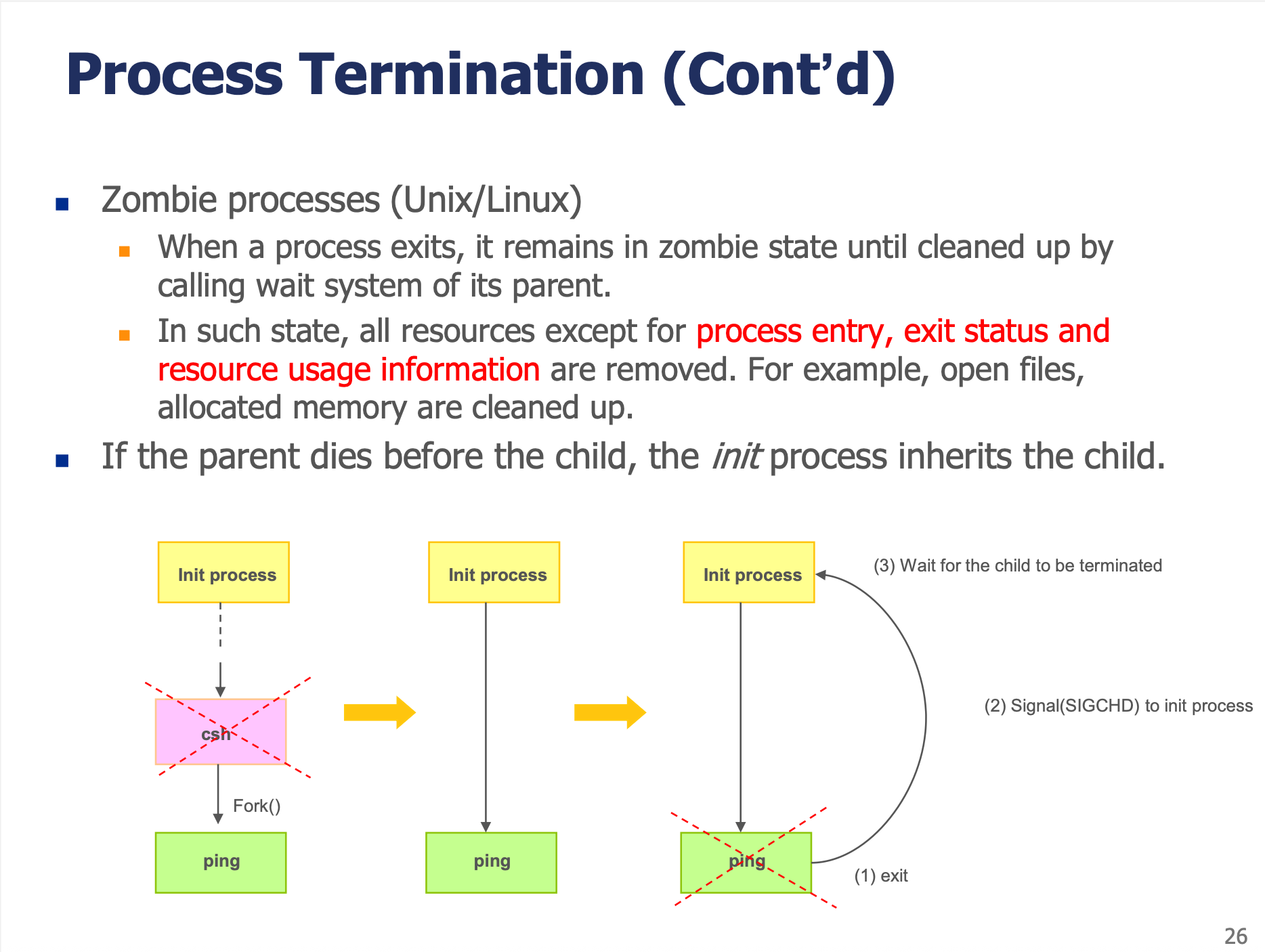
좀비 프로세스 (Zombie Processes)
-
Zombie processes (Unix/Linux)
- 프로세스가 종료되면, 부모가 wait 시스템 콜을 호출하여 정리할 때까지 좀비 상태로 남는다.
- 이 상태에서는 프로세스 엔트리, 종료 상태, 자원 사용 정보를 제외한 모든 자원이 제거된다. 열린 파일, 할당된 메모리 등은 정리된다.
-
부모가 자식보다 먼저 죽으면, init 프로세스가 자식을 상속한다.
핵심 포인트: 좀비 프로세스는 종료되었지만 부모가 wait()로 회수하지 않은 프로세스이다. 좀비가 많이 쌓이면 프로세스 테이블이 가득 차서 새 프로세스를 만들 수 없게 된다. 고아 프로세스는 init이 입양하여 정리한다.
협력 프로세스 (Cooperating Processes)
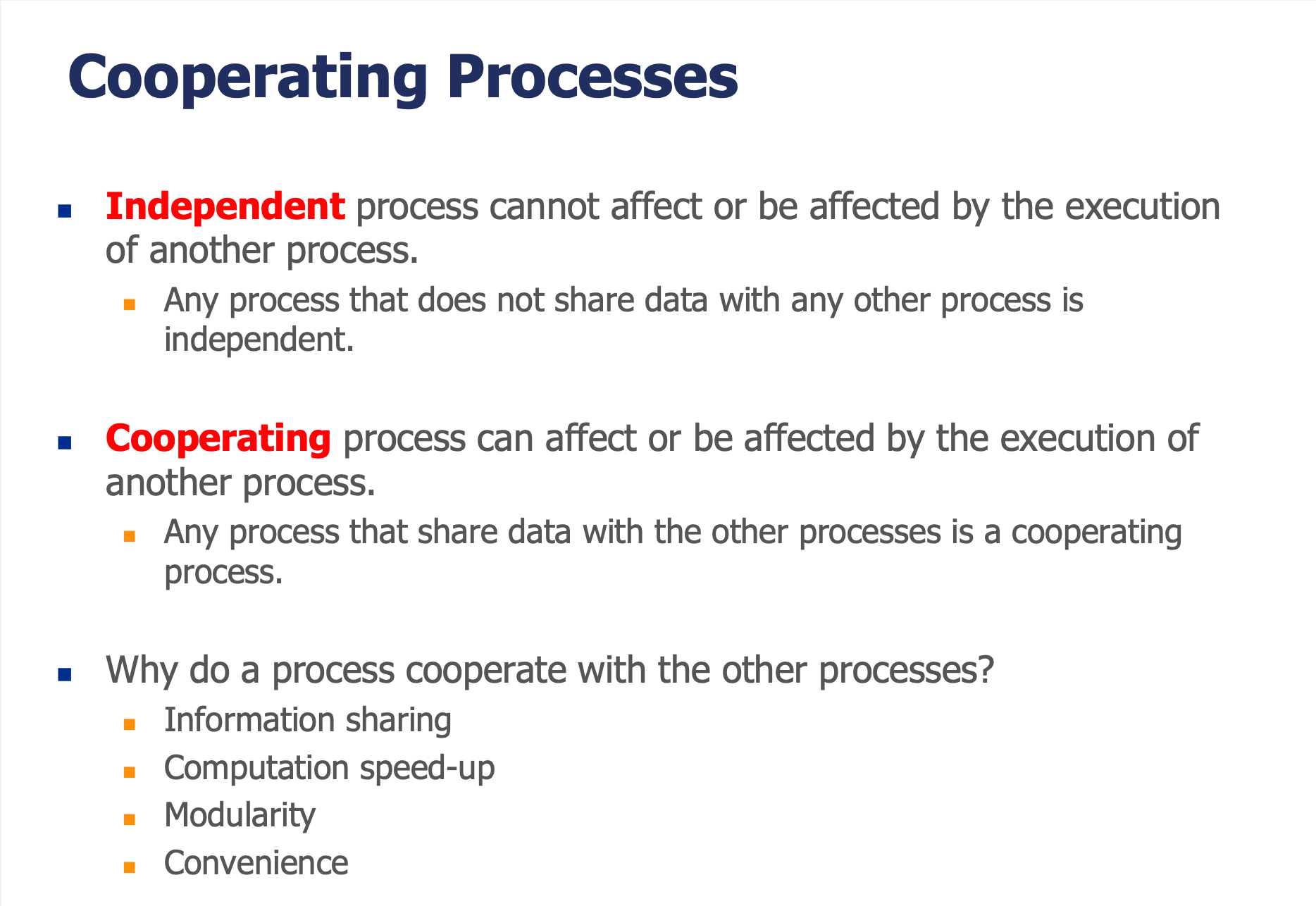
독립 프로세스 vs 협력 프로세스
| 유형 | 설명 |
|---|---|
| Independent process | 다른 프로세스의 실행에 영향을 주거나 받을 수 없다 |
| Cooperating process | 다른 프로세스의 실행에 영향을 주거나 받을 수 있다 |
프로세스가 협력하는 이유
| 이유 | 설명 |
|---|---|
| 정보 공유 | 여러 프로세스가 같은 데이터에 접근 |
| 계산 속도 향상 | 작업을 하위 작업으로 분할하여 병렬 실행 |
| 모듈성 | 시스템 기능을 별도의 프로세스로 모듈화 |
| 편의성 | 사용자가 여러 작업을 동시에 수행 |
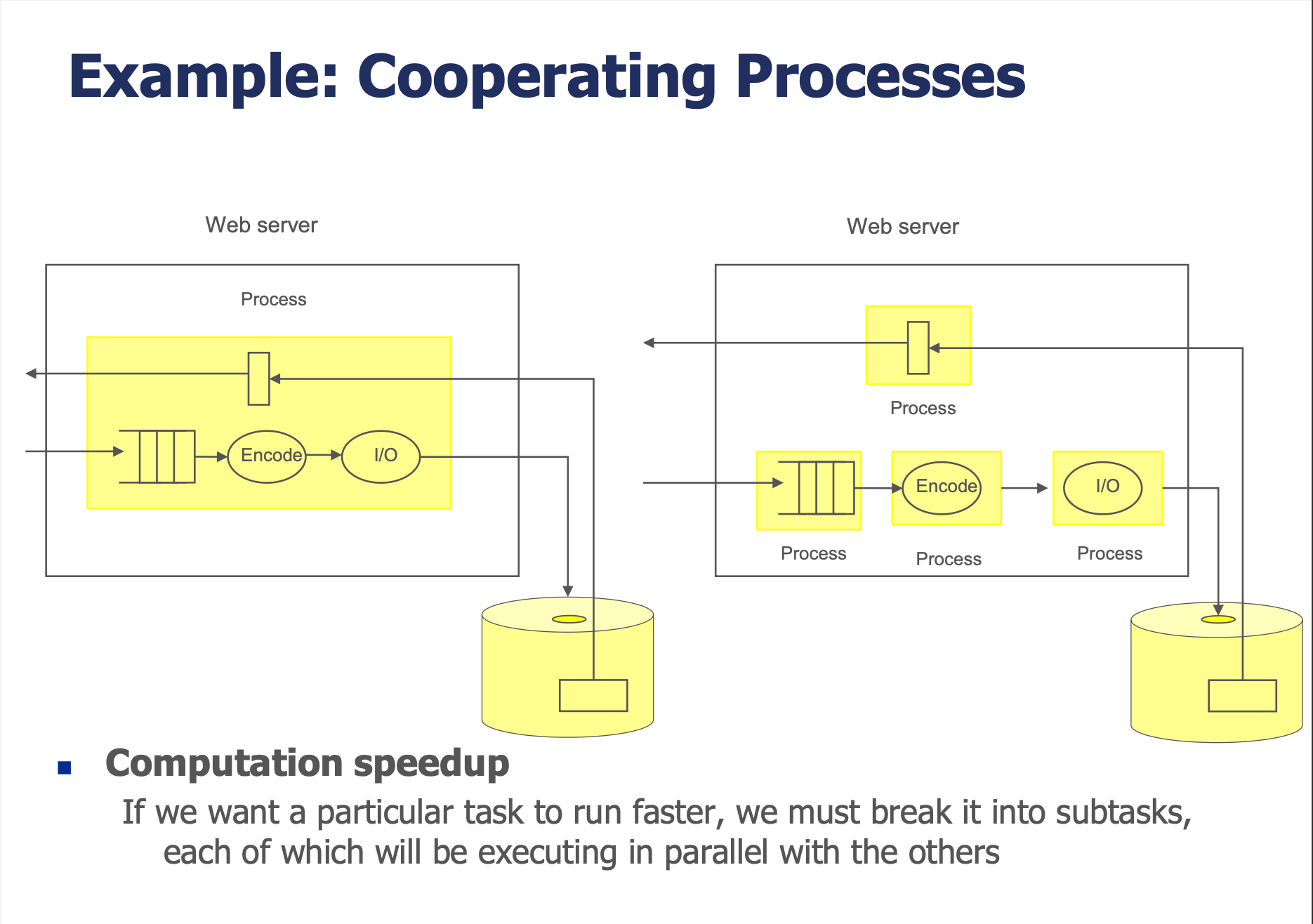
계산 속도 향상
웹 서버 예시:
[단일 프로세스] [협력 프로세스]
Process → Web server Process → Encode ──→ I/O
(순차 처리) Process → Encode ──→ I/O
Process → Web server
(병렬 처리 → 속도 향상)- 특정 작업을 더 빠르게 실행하려면, 작업을 하위 작업(subtask)으로 분할하고 각각을 다른 작업들과 병렬(parallel)로 실행해야 한다.
프로세스 간 통신 (IPC: Interprocess Communication)
정의
- 프로세스가 협력 프로세스와 소통하는 메커니즘
두 가지 기본 모델
| 모델 | 설명 | 방식 |
|---|---|---|
| Shared memory | 협력 프로세스가 공유하는 메모리 영역 | 프로세스들이 같은 메모리 영역을 직접 읽고 쓴다 |
| Message system | 공유 변수에 의존하지 않고 프로세스 간 통신 | 메시지를 send/receive하여 데이터를 교환한다 |
공유 메모리 (Shared Memory) 상세
- 프로세스가 공유 메모리 시스템 콜을 통해 다른 프로세스의 주소 공간에 접근할 수 있다.
- 과정:
- 1. 한 프로세스가 공유 메모리 세그먼트를 생성한다.
- 2. 다른 프로세스가 그 세그먼트를 자신의 주소 공간에 부착(attach)한다.
- 3. 이후 두 프로세스가 같은 메모리 영역을 읽고 쓸 수 있다.
메시지 전달 (Message Passing)
메시지 전달의 특징
- 같은 주소 공간을 공유하지 않고 프로세스가 통신하고 동작을 동기화할 수 있게 한다.
- 통신하는 프로세스가 다른 컴퓨터에 있을 수 있는 분산 환경에 적합하다.
두 가지 통신 방식
직접 통신 (Direct Communication)
- 프로세스가 서로를 명시적으로 지명해야 한다.
send(P, message) ← 프로세스 P에게 메시지를 보낸다
receive(Q, message) ← 프로세스 Q로부터 메시지를 받는다| 특성 | 설명 |
|---|---|
| 링크가 자동으로 설정됨 | 두 프로세스가 서로를 알면 바로 통신 가능 |
| 한 쌍에 정확히 하나의 링크 | 두 프로세스 사이에 하나의 채널만 존재 |
| 보통 양방향 | 양쪽 모두 보내고 받을 수 있다 |
단점 (hard coding): 프로세스 식별자를 직접 지정하므로, 종료된 프로세스의 ID가 재사용되면 엉뚱한 프로세스와 통신할 수 있다.
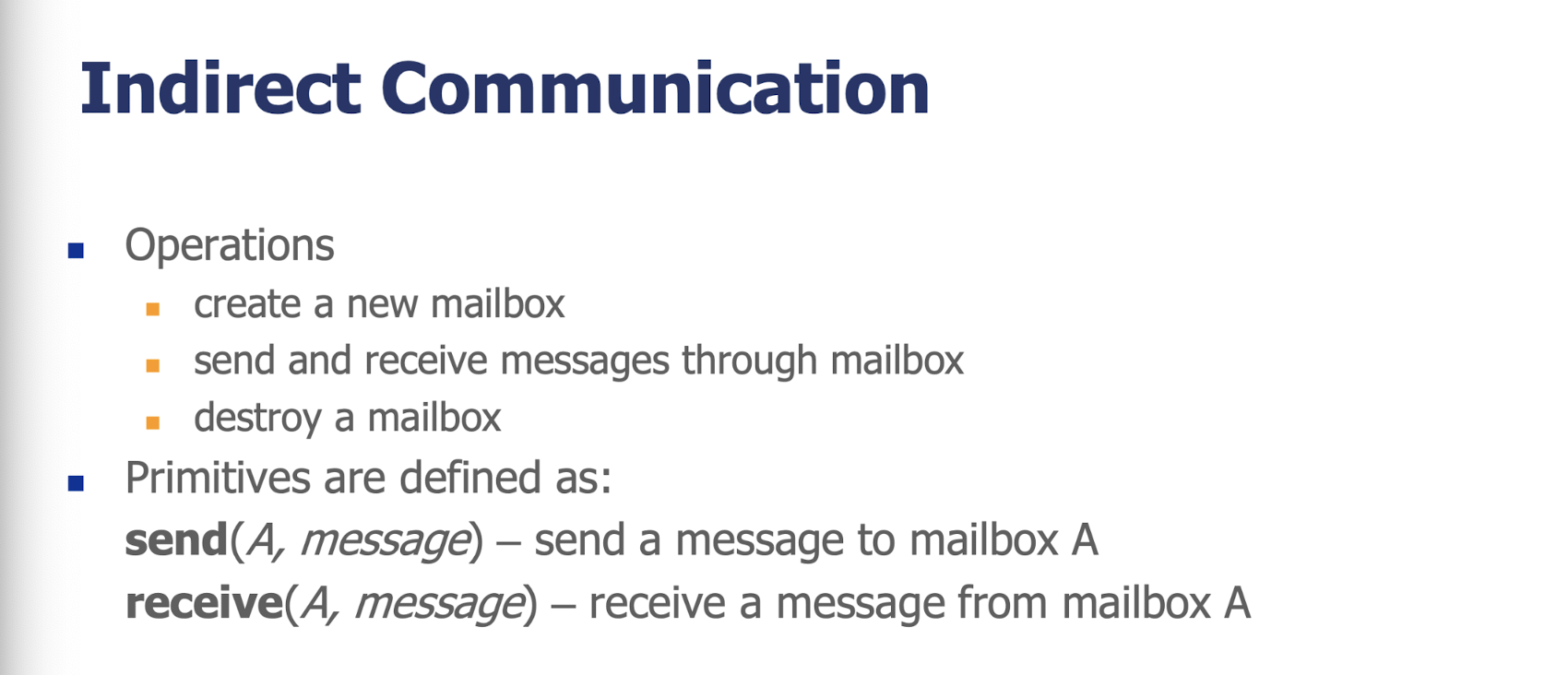
간접 통신 (Indirect Communication)
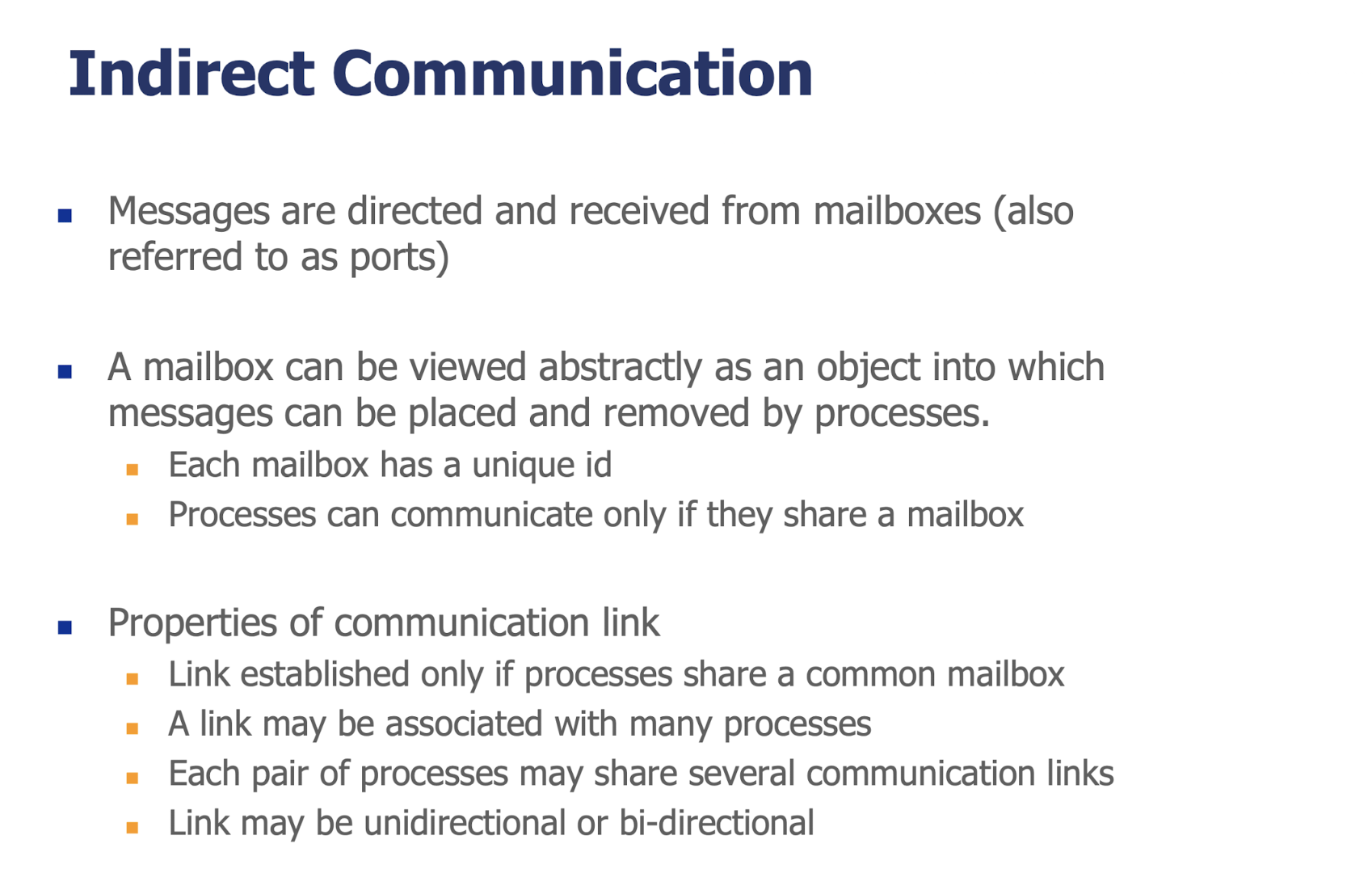
- 메시지가 메일박스(포트라고도 함)를 통해 보내지고 받아진다.
send(A, message) ← 메일박스 A에 메시지를 보낸다
receive(A, message) ← 메일박스 A에서 메시지를 받는다| 특성 | 설명 |
|---|---|
| 메일박스에 고유 ID가 있음 | 각 메일박스는 유일한 식별자를 가진다 |
| 공통 메일박스를 공유해야 통신 가능 | 같은 메일박스를 아는 프로세스만 통신 |
| 여러 프로세스가 하나의 링크에 연관 가능 | 메일박스 하나에 여러 프로세스가 연결 |
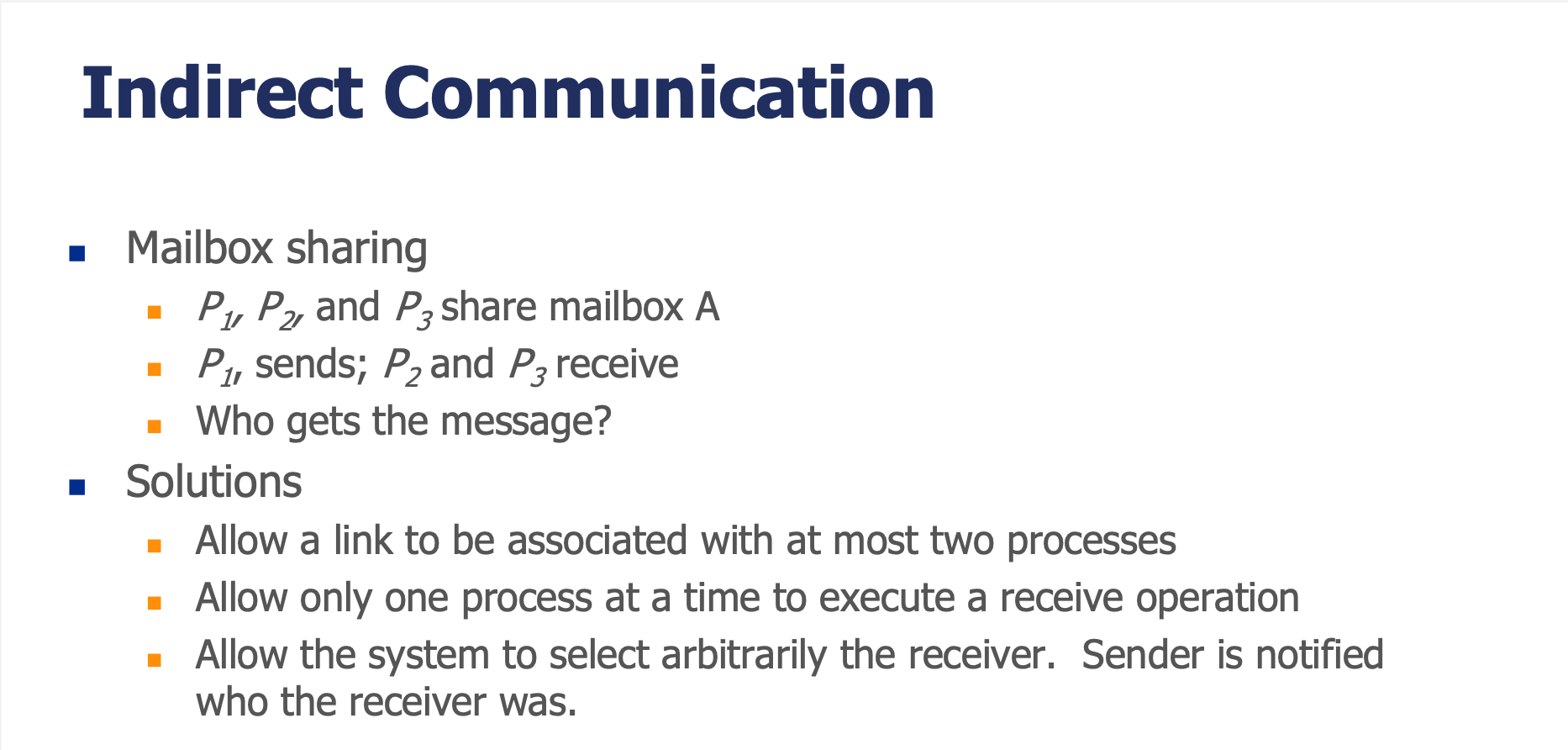
메일박스 공유 문제
- P1이 메일박스 A에 메시지를 보내고, P2와 P3가 모두 A에서 receive하면 — 누가 메시지를 받는가?
- 해결책: (1) 링크를 최대 2개 프로세스로 제한, (2) 한 번에 하나의 프로세스만 receive 실행 허용, (3) 시스템이 수신자를 임의로 선택
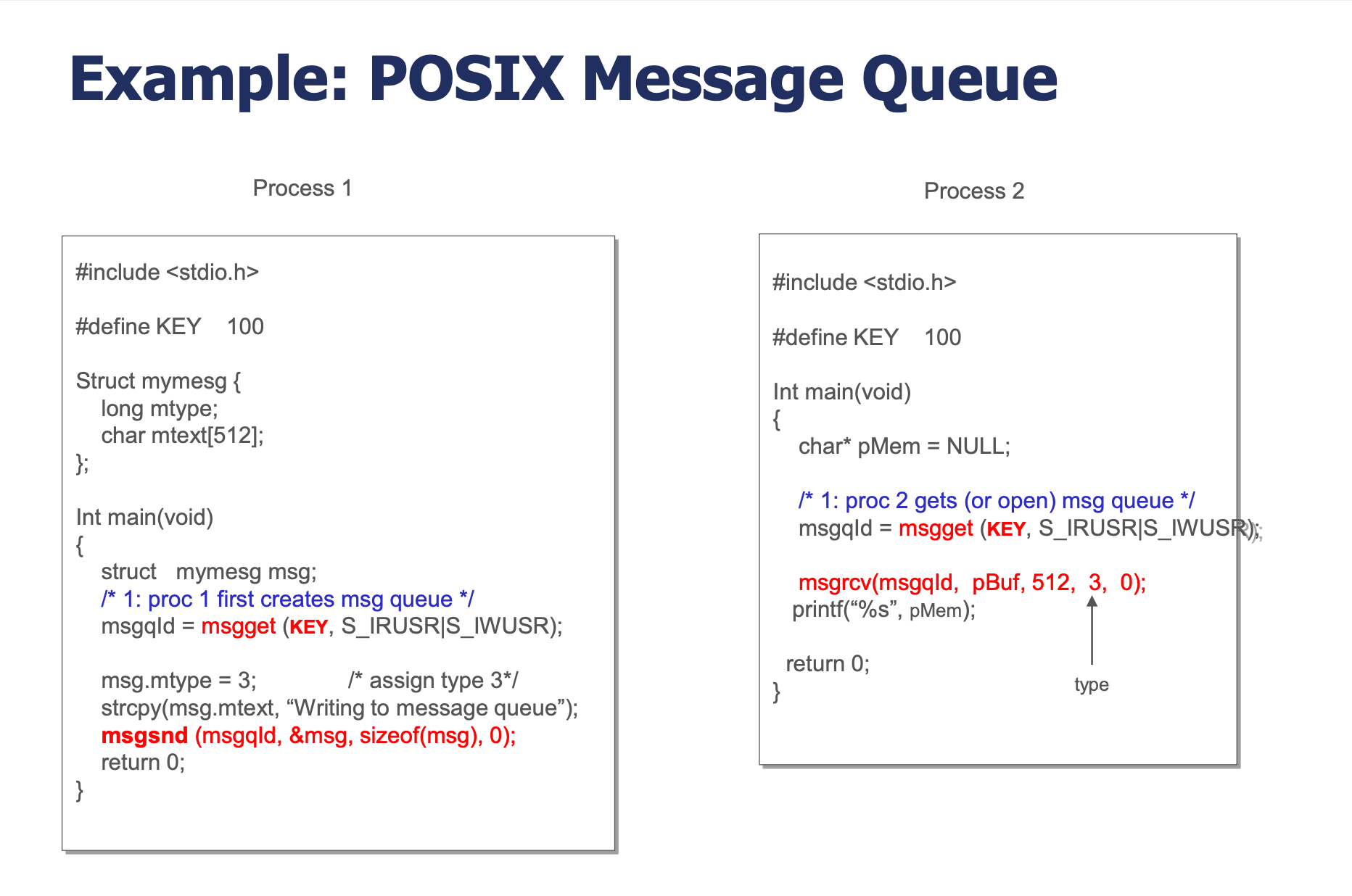
POSIX 메시지 큐 예제 (Example: POSIX Message Queue)
코드 분석
Process 1 (송신자):
#define KEY 100
struct mymesg { long mtype; char mtext[512]; };
int main(void) {
struct mymesg msg;
msgqId = msgget(KEY, S_IRUSR|S_IWUSR); // KEY=100으로 메시지 큐 생성/열기
msg.mtype = 3; // 메시지 타입을 3으로 지정
strcpy(msg.mtext, "Writing to message queue");
msgsnd(msgqId, &msg, sizeof(msg), 0); // 메시지 전송
return 0;
}Process 2 (수신자):
#define KEY 100
int main(void) {
char* pMem = NULL;
msgqId = msgget(KEY, S_IRUSR|S_IWUSR); // 같은 KEY=100으로 메시지 큐 열기
msgrcv(msgqId, pBuf, 512, 3, 0); // 타입 3인 메시지를 수신
printf("%s", pMem);
return 0;
}핵심 함수 설명:
| 함수 | 한국어 | 설명 |
|---|---|---|
msgget(KEY, ...) | 메시지 큐 생성/열기 | KEY 값으로 메시지 큐를 식별. 없으면 생성, 있으면 열기 |
msgsnd(id, msg, size, 0) | 메시지 전송 | 지정된 큐에 메시지를 보낸다 |
msgrcv(id, buf, size, 3, 0) | 메시지 수신 | 지정된 큐에서 타입 3인 메시지를 받는다 |
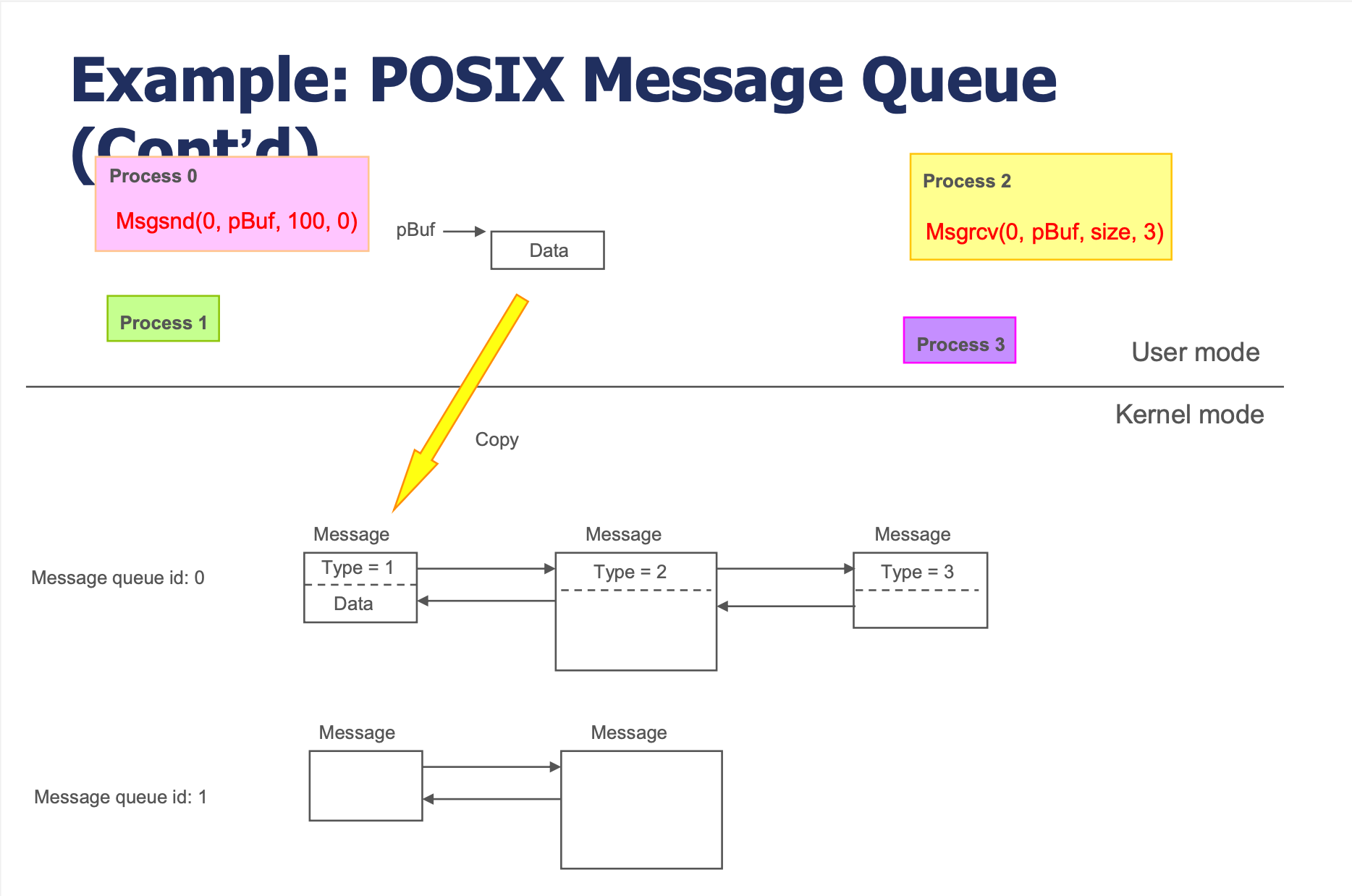
메세지 큐 내부구조
- 메시지 큐는 커널 공간에 존재한다.
msgsnd()로 메시지를 보내면 사용자 공간의 데이터가 커널의 큐로 복사(copy)된다.msgrcv()로 메시지를 받으면 커널의 큐에서 사용자 공간으로 복사된다.- type 필드로 메시지를 선택적으로 수신할 수 있다 (타입 3만 받기 등).
통신 모델 (Communications Models)
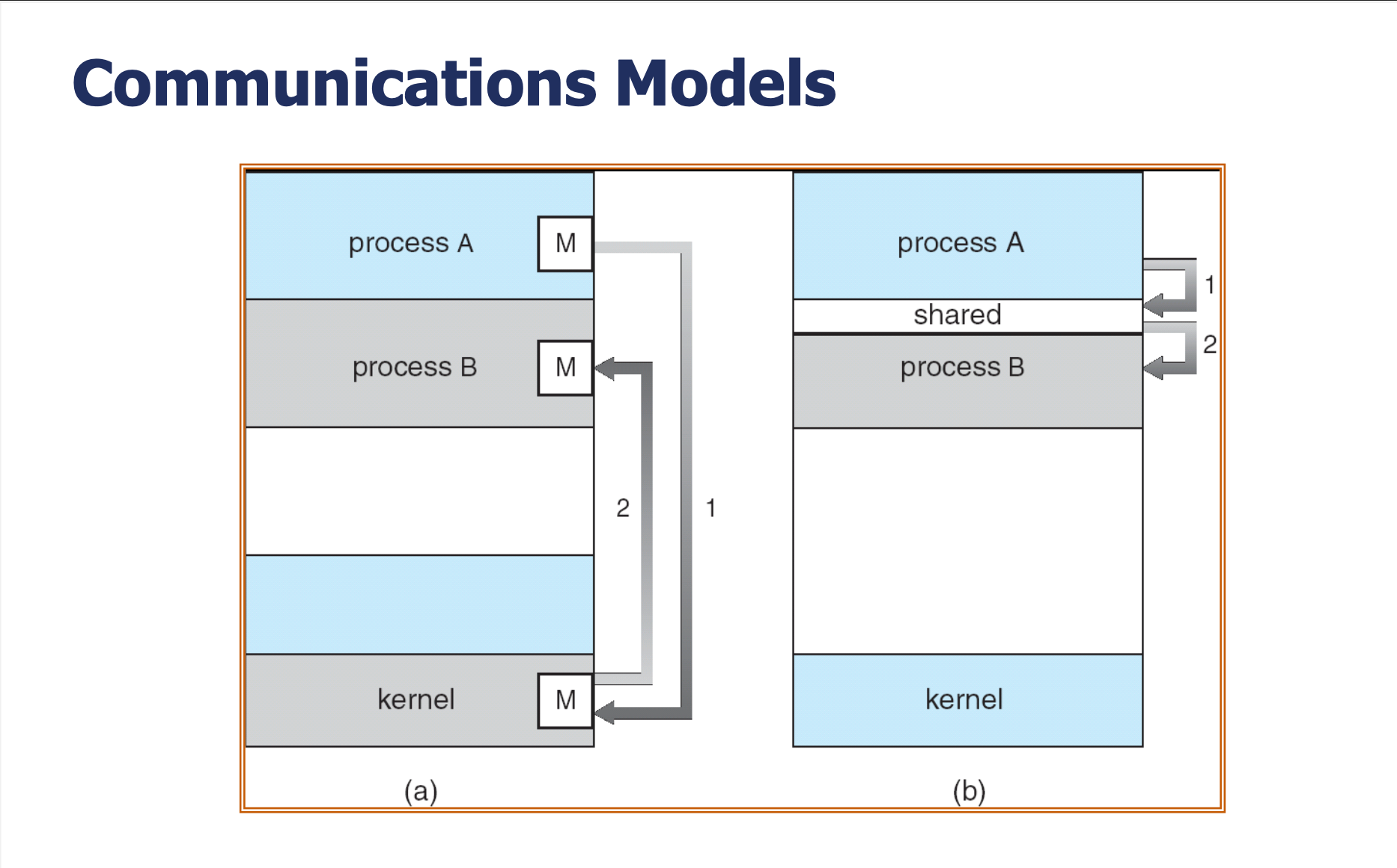
두 가지 모델 비교 그림
(a) 메시지 전달 (Message Passing)
┌────────────┐
│ process A │ M ──┐
│ │ │ 1: send
├────────────┤ │
│ process B │ M │
│ │ │ 2: receive
├────────────┤ │
│ │ │
│ kernel │ M ◄─┘ ← 커널을 통해 전달
└────────────┘- 메시지가 커널을 거쳐 전달된다 (시스템 콜 2번: send + receive).
(b) 공유 메모리 (Shared Memory)
┌────────────┐
│ process A │ 1: write
│ ┌──────┤ ◄──┐
│-----│shared│ │
│ └──────┤ │ ← 공유 영역에 직접 읽고 쓴다
│ process B │ ◄──┘ 2: read
├────────────┤
│ kernel │ ← 커널 개입 최소 (설정 시에만)
└────────────┘- 공유 메모리 영역을 설정한 후에는 커널 개입 없이 직접 읽고 쓴다.
| 비교 항목 | 메시지 전달 | 공유 메모리 |
|---|---|---|
| 커널 개입 | 매번 (send/receive마다) | 설정 시에만 (이후 직접 접근) |
| 속도 | 상대적으로 느림 (복사 오버헤드) | 상대적으로 빠름 (직접 접근) |
| 분산 환경 | 적합 (네트워크를 통해 가능) | 부적합 (같은 머신에서만) |
| 동기화 | 내장 (send/receive 자체가 동기화) | 별도 필요 (세마포어 등) |
| 구현 난이도 | 쉬움 | 어려움 (동기화 필요) |
동기화 (Synchronization)
블로킹 vs 비블로킹
| 유형 | 방식 | 설명 |
|---|---|---|
| Blocking send | 메시지가 수신될 때까지, 또는 큐가 가득 차면 송신자가 차단 | 보낸 메시지가 확실히 전달될 때까지 기다린다 |
| Blocking receive | 메시지가 도착할 때까지 수신자가 차단 | 메시지가 올 때까지 기다린다 |
| Non-blocking send | 송신자가 메시지를 보내고 계속 진행 | 전달 여부와 관계없이 바로 다음 작업 수행 |
| Non-blocking receive | 수신자가 유효한 메시지 또는 null을 받음 | 메시지가 없으면 null을 받고 계속 진행 |
- Blocking = Synchronous (동기식): 상대방의 응답을 기다린다
- Non-blocking = Asynchronous (비동기식): 기다리지 않고 바로 진행한다
버퍼링 (Buffering)
- 링크에 부착된 메시지 큐
3가지 구현 방식
| 방식 | 원문 | 한국어 | 동작 |
|---|---|---|---|
| Zero capacity | 0 messages. Sender must wait for receiver (rendezvous) | 용량 0. 송신자가 수신자를 기다려야 한다 (랑데뷰) | 큐(kernel queue)가 없으므로 송신자와 수신자가 동시에 만나야 전달 가능 |
| Bounded capacity | Finite length of n messages. Sender must wait if link full | 유한 용량 n개. 링크가 가득 차면 송신자가 대기 | 최대 n개까지 메시지 저장 가능. 가득 차면 송신자가 차단됨 |
| Unbounded capacity | Infinite length. Sender never waits | 무한 용량. 송신자가 절대 대기하지 않음 | 이론적으로 무한한 메시지를 저장 (실제로는 메모리 한계 존재) |
핵심 포인트: 랑데뷰(zero capacity)는 가장 강한 동기화를 제공하지만 성능이 낮고, 무한 버퍼(unbounded)는 가장 유연하지만 메모리 문제가 발생할 수 있다. 실제 시스템은 대부분 bounded capacity를 사용한다.
전체 핵심 용어 정리 (Key Terms)
| Key Terms | 설명 |
|---|---|
| Program | 디스크에 저장된 정적 코드 (수동적 개체) |
| Process | 실행 중인 프로그램 (능동적 개체) |
| PCB (Process Control Block) | 프로세스의 모든 상태 정보를 담는 커널 자료구조 |
| PID (Process ID) | 각 프로세스를 구분하는 고유 번호 |
| Text / Code | 프로그램의 기계어 코드가 저장되는 메모리 영역 |
| Data section | 전역 변수/정적 변수가 저장되는 영역 |
| BSS | 초기화되지 않은 전역 변수 영역 (Block Started by Symbol) |
| Heap | 동적 메모리 할당(malloc/new) 영역 (↑ 성장) |
| Stack | 함수 호출 시 지역변수/리턴주소 저장 (↓ 성장) |
| Context Switch | 현재 프로세스의 PCB 저장 + 새 프로세스의 PCB 로드 |
| Ready Queue | CPU 할당을 기다리는 프로세스들의 큐 |
| Device Queue | I/O 장치를 기다리는 프로세스들의 큐 |
| Long-term Scheduler | 디스크 → 메모리로 프로세스 로드 결정 |
| Short-term Scheduler | CPU에 실행할 프로세스 선택 |
| fork() | 자식 프로세스를 생성하는 UNIX 시스템 콜 |
| exec() | 프로세스 메모리를 새 프로그램으로 교체하는 시스템 콜 |
| exit() | 프로세스를 종료하는 시스템 콜 |
| wait() | 자식 프로세스 종료를 기다리는 시스템 콜 |
| Zombie Process | 종료되었지만 부모가 wait()하지 않아 잔류하는 프로세스 |
| Orphan Process | 부모가 먼저 종료된 프로세스 (init이 입양) |
| Cascading Termination | 부모 종료 시 모든 자식도 종료 |
| IPC | 프로세스 사이의 데이터 교환 메커니즘 |
| Shared Memory | 프로세스들이 공유하는 메모리 영역을 통한 IPC |
| Message Passing | send/receive로 메시지를 교환하는 IPC |
| Direct Communication | 프로세스를 명시적으로 지명하여 통신 |
| Indirect Communication | 메일박스(포트)를 통한 통신 |
| Mailbox / Port | 간접 통신에서 메시지가 저장/인출되는 추상 객체 |
| Blocking (Synchronous) | 상대방의 응답을 기다림 |
| Non-blocking (Asynchronous) | 기다리지 않고 바로 진행 |
| Rendezvous | 버퍼 없이 송신자와 수신자가 동시에 만나는 방식 |
| Bounded Capacity | 큐에 최대 n개까지 메시지 저장 가능 |
| TLB (Translation Lookaside Buffer) | 가상→물리 주소 변환을 캐싱하는 하드웨어 |