A* 에 대해 설명하세요
Keyword
특정 노드에서 특정 노드, G(n), H(n), F(n), 휴리스틱 함수, 유클리디안 거리 함수, 맨허튼 거리 함수, open list, closed list
Script
A* 알고리즘은 가중치 그래프에서 특정 노드와 특정 노드 간의 최단 경로를 파악할 수 있는 그리디 알고리즘입니다.
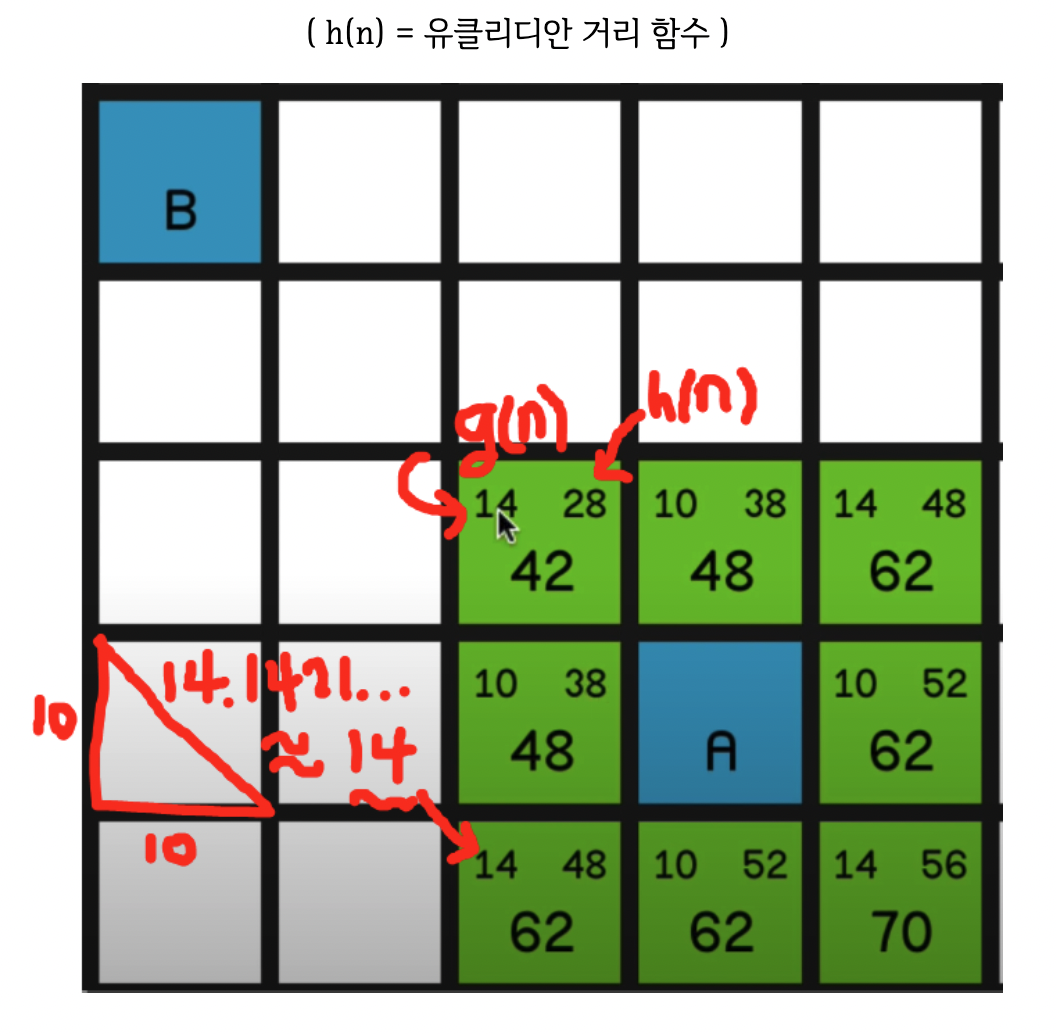
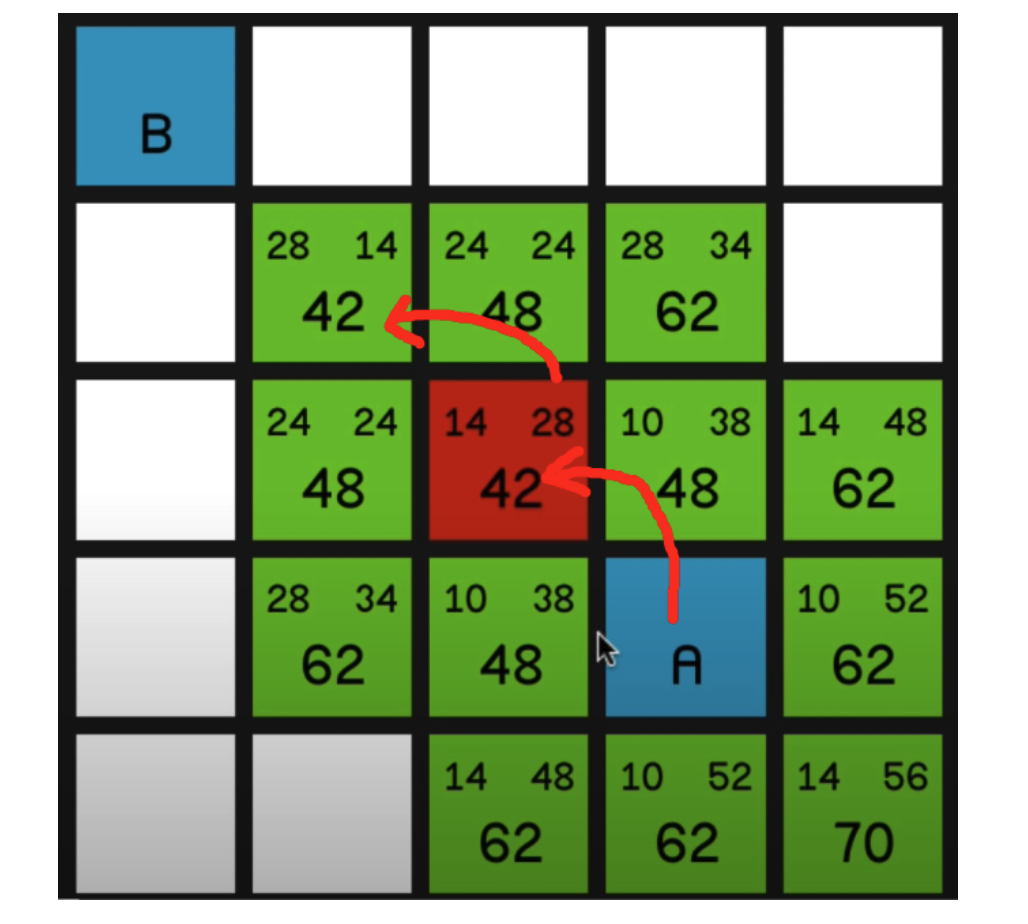
먼저, 시작 노드부터 현재 노드까지의 비용을 G(n), 현재 노드에서 목표 노드까지의 예상 비용을 H(n)이라고 할 때, 이 두 값을 더한 F(n)을 최소로 만드는 노드를 다음 탐색 노드로 선정합니다.
그리고 탐색 과정에서 각 노드들은 검색 가능성이 있는 노드 집합인 Open List와 이미 검색이 끝난 노드 집합인 closed list에서 관리됩니다.
이때 H(n)을 휴리스틱 함수라고 하는데, 이 함수를 어떻게 설계하느냐에 따라 알고리즘의 성능이 결정됩니다. 가장 단순하고 대표적인 휴리스틱 함수로 맨허튼 거리 함수와 유클리디안 거리 함수가 있습니다.
그런데 H(n)이 0이거나 모두 같은 경우는 결국 F(n) = G(n)이 되므로, 다익스트라와 동일하게 작동하게 됩니다.
Additional
코드 (python)
from collections import deque
class Graph:
def __init__(self, adjac_lis):
self.adjac_lis = adjac_lis
def get_neighbors(self, v):
return self.adjac_lis[v]
# This is heuristic function which is having equal values for all nodes
def h(self, n):
H = {
'A': 1,
'B': 1,
'C': 1,
'D': 1
}
return H[n]
def a_star_algorithm(self, start, stop):
# In this open_lst is a lisy of nodes which have been visited, but who's
# neighbours haven't all been always inspected, It starts off with the start
#node
# And closed_lst is a list of nodes which have been visited
# and who's neighbors have been always inspected
open_lst = set([start])
closed_lst = set([])
# poo has present distances from start to all other nodes
# the default value is +infinity
poo = {}
poo[start] = 0
# par contains an adjac mapping of all nodes
par = {}
par[start] = start
while len(open_lst) > 0:
n = None
# it will find a node with the lowest value of f() -
for v in open_lst:
if n == None or poo[v] + self.h(v) < poo[n] + self.h(n):
n = v;
if n == None:
print('Path does not exist!')
return None
# if the current node is the stop
# then we start again from start
if n == stop:
reconst_path = []
while par[n] != n:
reconst_path.append(n)
n = par[n]
reconst_path.append(start)
reconst_path.reverse()
print('Path found: {}'.format(reconst_path))
return reconst_path
# for all the neighbors of the current node do
for (m, weight) in self.get_neighbors(n):
# if the current node is not presentin both open_lst and closed_lst
# add it to open_lst and note n as it's par
if m not in open_lst and m not in closed_lst:
open_lst.add(m)
par[m] = n
poo[m] = poo[n] + weight
# otherwise, check if it's quicker to first visit n, then m
# and if it is, update par data and poo data
# and if the node was in the closed_lst, move it to open_lst
else:
if poo[m] > poo[n] + weight:
poo[m] = poo[n] + weight
par[m] = n
if m in closed_lst:
closed_lst.remove(m)
open_lst.add(m)
# remove n from the open_lst, and add it to closed_lst
# because all of his neighbors were inspected
open_lst.remove(n)
closed_lst.add(n)
print('Path does not exist!')
return Noneinput
adjac_lis = {
'A': [('B', 1), ('C', 3), ('D', 7)],
'B': [('D', 5)],
'C': [('D', 12)]
}
graph1 = Graph(adjac_lis)
graph1.a_star_algorithm('A', 'D')output
Path found: ['A', 'B', 'D']
['A', 'B', 'D']유클리디안 거리 함수
멘허튼 거리 함수
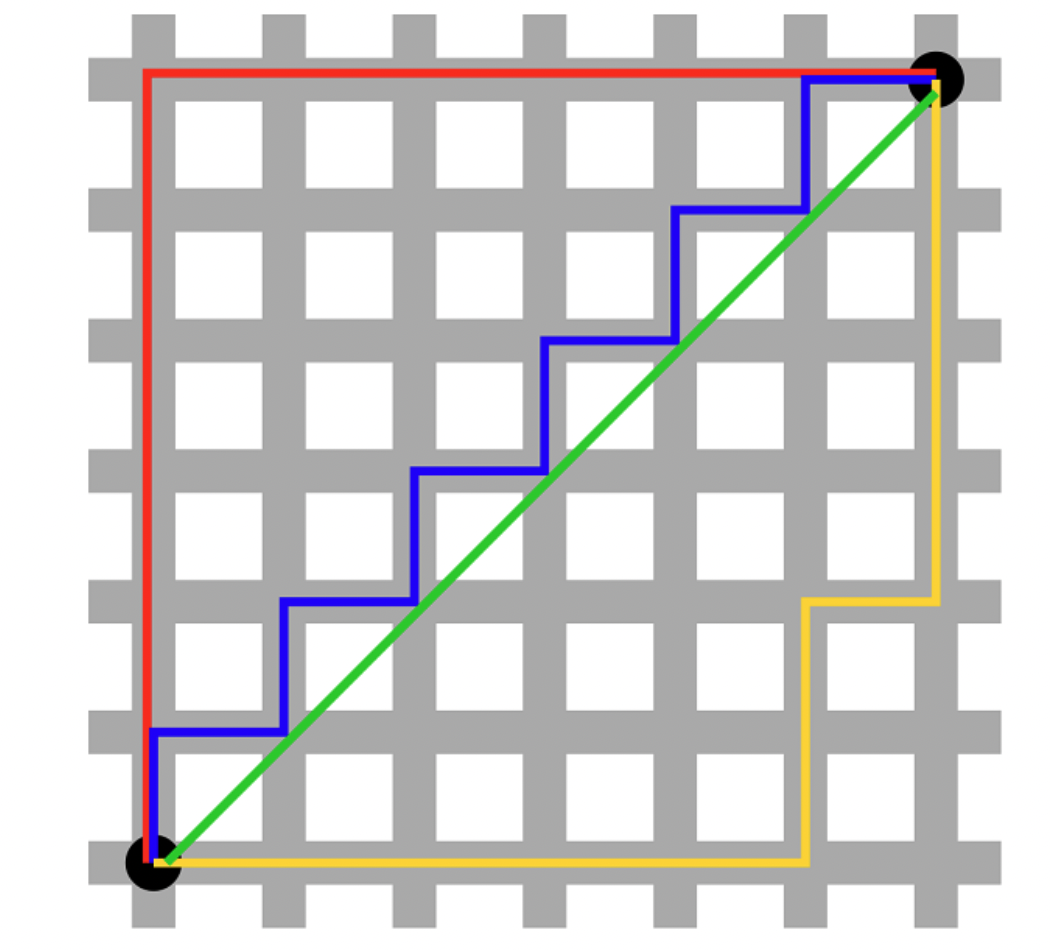
여기서 초록색을 제외한 '노랑', '파랑', '빨강' 경로는 모두 길이가 같다.
그래서 결국 맨허튼 거리는 아래 수식으로 구한다.
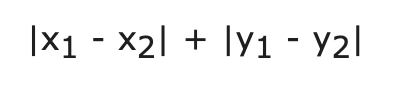

with programming