인터럽트를 적용하는 이유
폴링으로 키입력을 조사하고 있으면 CPU 로드가 100%가 찍히면서 금방 CPU가 과열된다. 프로세스가 계속 준비상태랑 실행상태를 왔다갔다 하면서(문맥교환 하면서) 키입력을 감지하고 있는 상황이기 때문이다.
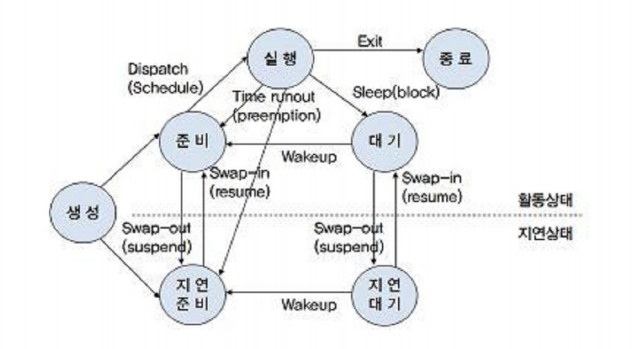
이렇게 할 필요가 없다. 여기에 인터럽트를 적용해야 한다. 인터럽트를 적용하면 인터럽트가 들어오기 전까지 프로세스의 상태를 대기(sleep)상태로 만들어 놓는 식으로 진행하게 때문에 CPU가 100% 사용될 일이 없다. 대기상태에 들어간 프로세스를 깨우는 역할(Wakeup)을 하는게 바로 인터럽트 핸들러인 것이다.
1단계: "dev.c"에서 key 입력 여부 검사방식을 폴링에서 인터럽트로 변경한다.
2단계: "app.c"에서 do~while()에 blocking I/O를 적용한다.
위 두단계가 모두 적용되어야 CPU 로드 100%가 풀린다.
인터럽트를 적용한 ledkey
우리는 인터럽트 등록/해제 하는 것은 insmod 할때랑 rmmod 할 때 하도록 할 것이지만, 보통은 open(), close() 할 때 해주는게 보통이다.
gpio핀을 외부 인터럽트 핀으로 설정해줘야 한다.
1. gpio 핀을 먼저 input 상태로 만든다.
2. irq 등록을 해준다.
아래는 전역변수를 쓰지 않고 void *data를 사용하여 매개변수를 사용하여 값을 넘겨주는 방식까지 적용된 코드이다.
동적메모리 할당 및 구조체를 이용한 인터럽트 서비스루틴과의 정보공유를 위해 open() close()에 수정이 발생한 경위
모든 시스템 콜 함수에는 파일포인터(struct file* filp)를 넘기도록 되어있다.
즉 그것은 다시 말해 파일포인터를 이용하면 모든 시스템 콜 함수에서 동일한 메모리 영역에 접근할 수 있다는 것이다. 즉 동적할당을 하려면 파일포인터를 접근해야만 한다.
근데 insmod와 rmmod에 대한 init()과 exit()에는 인자로 파일포인터가 없다.(당연한 것이다. 미래의 열리지도 않은 파일포인터를 어떻게 인자로 주겠는가.) 그래서 우리는 open()과 close()에서 모든 인터럽트 등록/해제를 진행함으로써 모든 시스템 콜 함수에서 파일포인터에 접근할 수 있도록 하겠다.

우리는 file 구조체(struct file *filp)의 멤버변수인 void *private_data;에다가 지역변수로 선언된 동적할당 지역변수 포인터를 넘겨주면 그렇게 함으로써 모든 디바이스 드라이버 함수에서 *filp를 통해서 해당 동적할당 메모리에 접근할 수 있게 되는 것이다.
dev.c
코드 바탕은 p238_ledkey이다.
#include <linux/init.h>
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/types.h>
#include <linux/fcntl.h>
#include <linux/gpio.h> // gpio
#include <linux/interrupt.h>
#include <linux/irq.h>
#define DEBUG 1
#define LEDKEY_DEV_NAME "ledkey_dev"
#define LEDKEY_DEV_MAJOR 230 // 디바이스 주번호
#define OFF 0
#define ON 1
#define GPIOLEDCNT 8
#define GPIOKEYCNT 8
static int gpioLed[GPIOLEDCNT] = {6,7,8,9,10,11,12,13};
static int gpioKey[GPIOKEYCNT] = {16,17,18,19,20,21,22,23};
// 이건 전역변수가 아니다. 그저 구조체의 틀을 선언했을 뿐이다. 자료형을 선언했을 뿐이다.
// 구조체를 사용해야지만 인터럽트 서비스 루틴에다가 정보를 넘겨줄 때 여러개의 정보를 한번에 넘겨줄 수 있기 때문에 구조체를 선언한 것이다.
typedef struct {
int key_irq[8];
int keyNumber;
} keyData;
static int gpioLedInit(void);
static void gpioLedSet(long);
static void gpioLedFree(void);
static int gpioKeyInit(void);
//static int gpioKeyGet(void);
static void gpioKeyFree(void);
static int gpioKeyIrqInit(keyData* pKeyData);
static void gpioKeyIrqFree(keyData* pKeyData);
irqreturn_t key_isr(int irq, void *data);
irqreturn_t key_isr(int irq, void *data) // 이 함수는 '커널'에서 호출하는 함수이다.
{
int i;
keyData* pKeyData = (keyData*)data; // void포인터로 받아오기 때문에 크기정보가 없다. 그래서 크기정보를 주기 위해 형변환 해준다.
for(i = 0; i < GPIOKEYCNT; i++)
{
if(irq == pKeyData->key_irq[i])
{
pKeyData->keyNumber = i + 1; // 전역변수, 키 번호를 0~7이 아니라 1~8번 범위로 보기 위함
break;
}
}
#if DEBUG
printk(KERN_DEBUG "key_isr() irq: %d, keyNumber: %d\n", irq, pKeyData->keyNumber);
#endif
return IRQ_HANDLED;
}
static int gpioLedInit(void)
{
int i;
int ret=0;
char gpioName[10];
for(i=0;i<GPIOLEDCNT;i++)
{
sprintf(gpioName,"led%d",i);
ret = gpio_request(gpioLed[i],gpioName);
if(ret < 0) {
printk("Failed gpio_request() gpio%d error \n",i);
return ret;
}
ret = gpio_direction_output(gpioLed[i],OFF);
if(ret < 0) {
printk("Failed gpio_direction_output() gpio%d error \n",i);
return ret;
}
}
return ret;
}
static void gpioLedSet(long val)
{
int i;
for(i=0;i<GPIOLEDCNT;i++)
{
gpio_set_value(gpioLed[i],(val>>i) & 0x1);
}
}
static void gpioLedFree(void)
{
int i;
for(i=0;i<GPIOLEDCNT;i++)
{
gpio_free(gpioLed[i]);
}
}
static int gpioKeyInit(void)
{
int i;
int ret=0;
char gpioName[10];
for(i=0;i<GPIOKEYCNT;i++)
{
sprintf(gpioName,"key%d",gpioKey[i]);
ret = gpio_request(gpioKey[i], gpioName);
if(ret < 0) {
printk("Failed Request gpio%d error\n", 6);
return ret;
}
}
for(i=0;i<GPIOKEYCNT;i++)
{
ret = gpio_direction_input(gpioKey[i]);
if(ret < 0) {
printk("Failed direction_output gpio%d error\n", 6);
return ret;
}
}
return ret;
}
/* <이제 폴링방식으로 key를 조사하지 않을 것이므로 필요없어진 함수...>
static int gpioKeyGet(void)
{
int i;
int ret;
int keyData=0;
for(i=0;i<GPIOKEYCNT;i++)
{
// ret=gpio_get_value(gpioKey[i]) << i;
// keyData |= ret;
ret=gpio_get_value(gpioKey[i]);
keyData = keyData | ( ret << i );
}
return keyData;
}
*/
static void gpioKeyFree(void)
{
int i;
for(i=0;i<GPIOKEYCNT;i++)
{
gpio_free(gpioKey[i]);
}
}
static int gpioKeyIrqInit(keyData* pKeyData)
{
int i;
int result;
char * irqName[8] = {
"IrqKey0","IrqKey1","IrqKey2","IrqKey3",
"IrqKey4","IrqKey5","IrqKey6","IrqKey7"
};
for(i = 0; i < GPIOKEYCNT; i++)
{
// gpio핀의 기능을 외부 인터럽트 기능으로 설정하면서 그 값을 irq로 설정
pKeyData->key_irq[i] = gpio_to_irq(gpioKey[i]);
if (pKeyData->key_irq[i] < 0)
{
printk("gpioKeyIrq() Failed gpio %d\n", gpioKey[i]);
return pKeyData->key_irq[i]; // 오류 예외처리
}
}
for (i = 0; i < GPIOKEYCNT; i++)
{
// 인터럽트 등록: request_irq(인터럽트 번호, 핸들러함수, 인터럽트타이밍(라이징엣지/폴링엣지)설정, 인터럽트 이름, 인터럽트서비스루틴에 전달할 변수)
result = request_irq(pKeyData->key_irq[i], key_isr, IRQF_TRIGGER_RISING, irqName[i], pKeyData);
if(result < 0)
{
printk(KERN_ERR "request_irq() failed irq %d\n", pKeyData->key_irq[i]);
return result;
}
}
return 0; // 정상종료
}
static void gpioKeyIrqFree(keyData* pKeyData)
{
int i;
for(i = 0; i < GPIOKEYCNT; i++)
{
free_irq(pKeyData->key_irq[i], pKeyData); // 커널 지원 함수 사용
}
}
/////////////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////////////////////
static int ledkey_open(struct inode *inode, struct file *filp)
{
int num0 = MINOR(inode->i_rdev);
int num1 = MAJOR(inode->i_rdev);
int result;
// 동적 메모리 할당(36바이트의 keyData) 및 인터럽트 관련 각종 초기화 등록
keyData* pKeyData = (keyData*)kmalloc(sizeof(keyData), GFP_KERNEL);
pKeyData->keyNumber = 0;
if(!pKeyData) return -ENOMEM;
// GFP_KERNEL: 항상 메모리를 할당하도록 하는 매크로
// 우리가 목적하는 것은 현재 이 함수의 지역변수로 선언된 pKeyData의 내용을 다른 시스템 콜 함수에서 사용할 수 있도록 하는 것이다. 그것을 위해서 *filp를 사용할 것이다.
result = gpioLedInit();
if(result < 0) return result;
result = gpioKeyInit();
if(result < 0) return result;
result = gpioKeyIrqInit(pKeyData); // 동적할당 된 메모리를 넘겨준다.
if(result < 0) return result;
filp->private_data = pKeyData;
// 우리는 file 구조체(`struct file *filp`)의 멤버변수인 `void *private_data;`에다가 지역변수로 선언된 동적할당 지역변수 포인터를 넘겨주면 그렇게 함으로써 모든 디바이스 드라이버 함수에서 `*filp`를 통해서 해당 동적할당 메모리에 접근할 수 있게 되는 것이다.(file 구조체 내부는 fs.h 파일에 있다)
#if DEBUG
printk("ledkey open-> minor : %d\n", num0);
printk("ledkey open-> major : %d\n", num1);
#endif
try_module_get(THIS_MODULE);
return 0;
}
static ssize_t ledkey_read(struct file *filp, char *buf, size_t count, loff_t *f_pos)
{
char kbuff;
keyData* pKeyData = (keyData*)filp->private_data;
//kbuff = gpioKeyGet(); // 이렇게 폴링으로 하지 않고 인터럽트를 적용해야하는 부분
kbuff = pKeyData->keyNumber; // 전역변수 keyNumber
put_user(kbuff, buf);
if(pKeyData->keyNumber)
pKeyData->keyNumber = 0;
#if DEBUG
printk("%d\n", kbuff);
printk("ledkey read -> buf : %08X, count : %08X \n", (unsigned int)buf, count);
#endif
return count;
}
static ssize_t ledkey_write(struct file *filp, const char *buf, size_t count, loff_t *f_pos)
{
char kbuff;
get_user(kbuff, buf);
gpioLedSet(kbuff);
#if DEBUG
printk("ledkey write -> buf : %08X, count : %08X \n", (unsigned int)buf, count);
#endif
return count; // 실제로 읽은 바이트 수를 리턴해야 한다.
}
static long ledkey_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
printk("ledkey ioctl -> cmd : %08X, arg : %08X\n", cmd, (unsigned int)arg);
return 0x53;
}
static int ledkey_release(struct inode *inode, struct file *filp)
{
keyData* pKeyData = (keyData*)filp->private_data;
printk("ledkey release \n");
module_put(THIS_MODULE);
gpioKeyIrqFree(pKeyData); // 파일구조체 포인터가 들고 있던 동적메모리 값을 인자로 던져줌
gpioKeyFree();
gpioLedFree();
if (pKeyData) // 주소가 할당되어있다면..(nullptr이 아니라면..)
kfree(pKeyData); // 혹시 다른 곳에서 동적메모리를 해제할 수도 있기 때문에 이렇게 구성함.
return 0;
}
struct file_operations ledkey_fops = {
//.owner = THIS_MODULE,
.read = ledkey_read,
.write = ledkey_write,
.unlocked_ioctl = ledkey_ioctl,
.open = ledkey_open,
.release = ledkey_release, // 저수준 입출력함수에서 close()가 .release에 대응한다.
};
static int ledkey_init(void)
{
int result;
printk("ledkey ledkey_init \n");
result = register_chrdev(LEDKEY_DEV_MAJOR, LEDKEY_DEV_NAME, &ledkey_fops);
if (result < 0) return result;
return 0;
}
static void ledkey_exit(void)
{
printk("ledkey ledkey_exit \n");
unregister_chrdev(LEDKEY_DEV_MAJOR, LEDKEY_DEV_NAME);
}
module_init(ledkey_init);
module_exit(ledkey_exit);
MODULE_AUTHOR("KCCI");
MODULE_DESCRIPTION("Device Driver pracite~!");
MODULE_LICENSE("Dual BSD/GPL");
app.c
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <errno.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdlib.h>
#define DEVICE_FILENAME "/dev/ledkey_dev"
void print_OX(unsigned char);
int main(int argc,char * argv[])
{
char buff = 0;
char oldBuff = 0;
int ret;
int dev;
unsigned long val;
if(argc < 2)
{
printf("Usage : %s ledValue[0x00~0xff]\n",argv[0]);
return 1;
}
val = strtoul(argv[1],0,16);
if(val < 0 || 0xff < val)
{
printf("Usage : %s ledValue[0x00~0xff]\n",argv[0]);
return 2;
}
buff = val;
dev = open( DEVICE_FILENAME, O_RDWR|O_NDELAY );
if(dev<0)
{
perror("open()");
return 2;
}
ret = write(dev,&buff,sizeof(buff));
if(ret < 0)
{
perror("write()");
return 3;
}
buff = 0;
do {
read(dev,&buff,sizeof(buff));
if(oldBuff != buff)
{
if(buff != 0)
{
printf("key : %d\n",buff);
print_OX(buff);
write(dev,&buff,sizeof(buff));
if(buff == 8) //key:8
break;
}
oldBuff = buff;
}
} while(1);
close(dev);
return 0;
}
void print_OX(unsigned char led)
{
int i;
led = 1 << led-1; // 커널에서 키 넘버를 보낼 때 1~8범위로 보냈기 때문에 0~7 범위로 바꿔준 뒤 비트시프트
puts("1:2:3:4:5:6:7:8");
for(i=0;i<=7;i++)
{
if(led & (0x01 << i))
putchar('O');
else
putchar('X');
if(i < 7 )
putchar(':');
else
putchar('\n');
}
return;
}
