
1. 문제
-
도로 : n * m
-
자동차 : 1 * 1
-
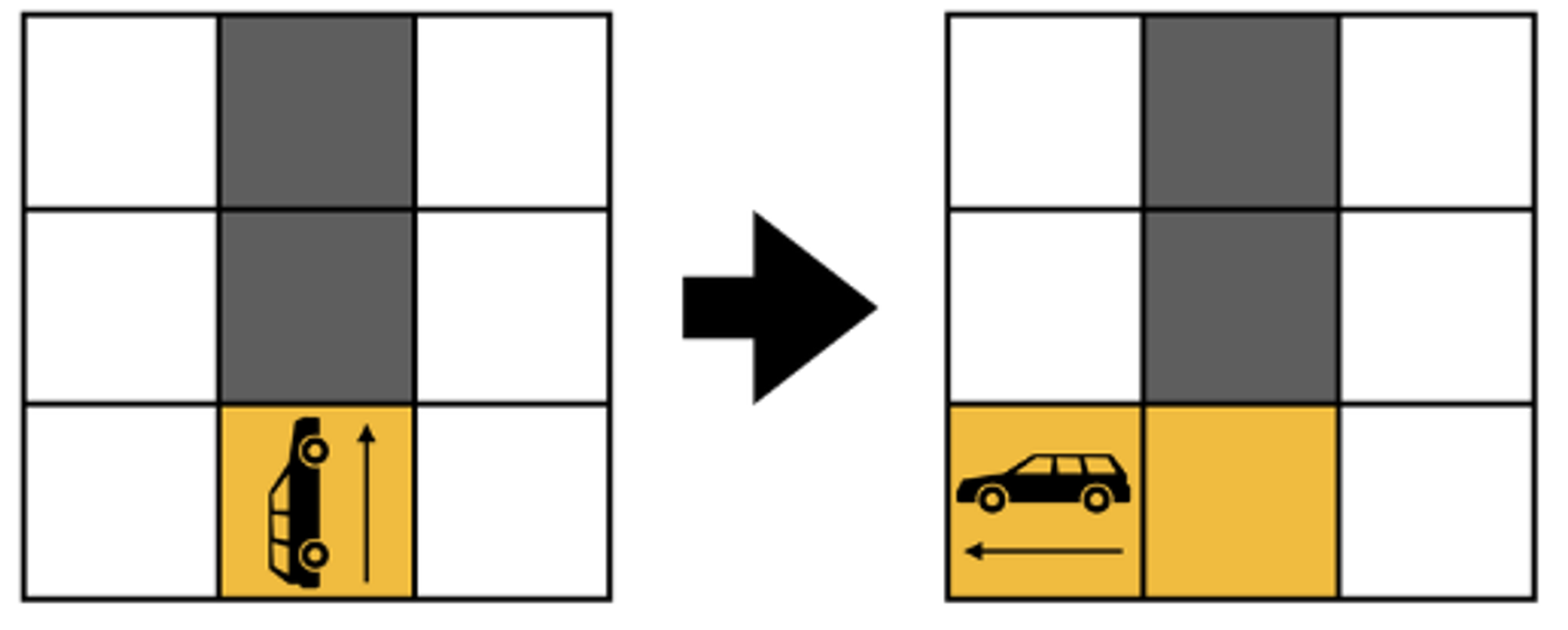
다음 규칙에 따라서 이동
-
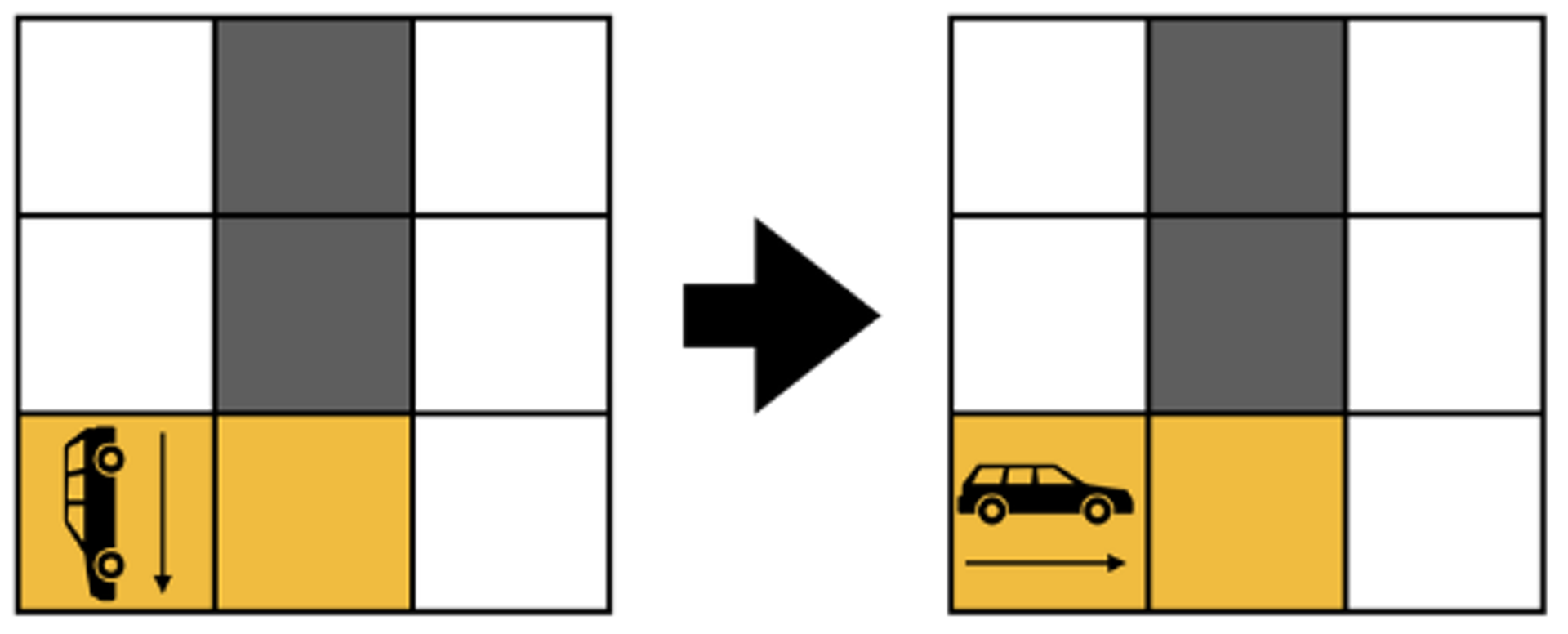
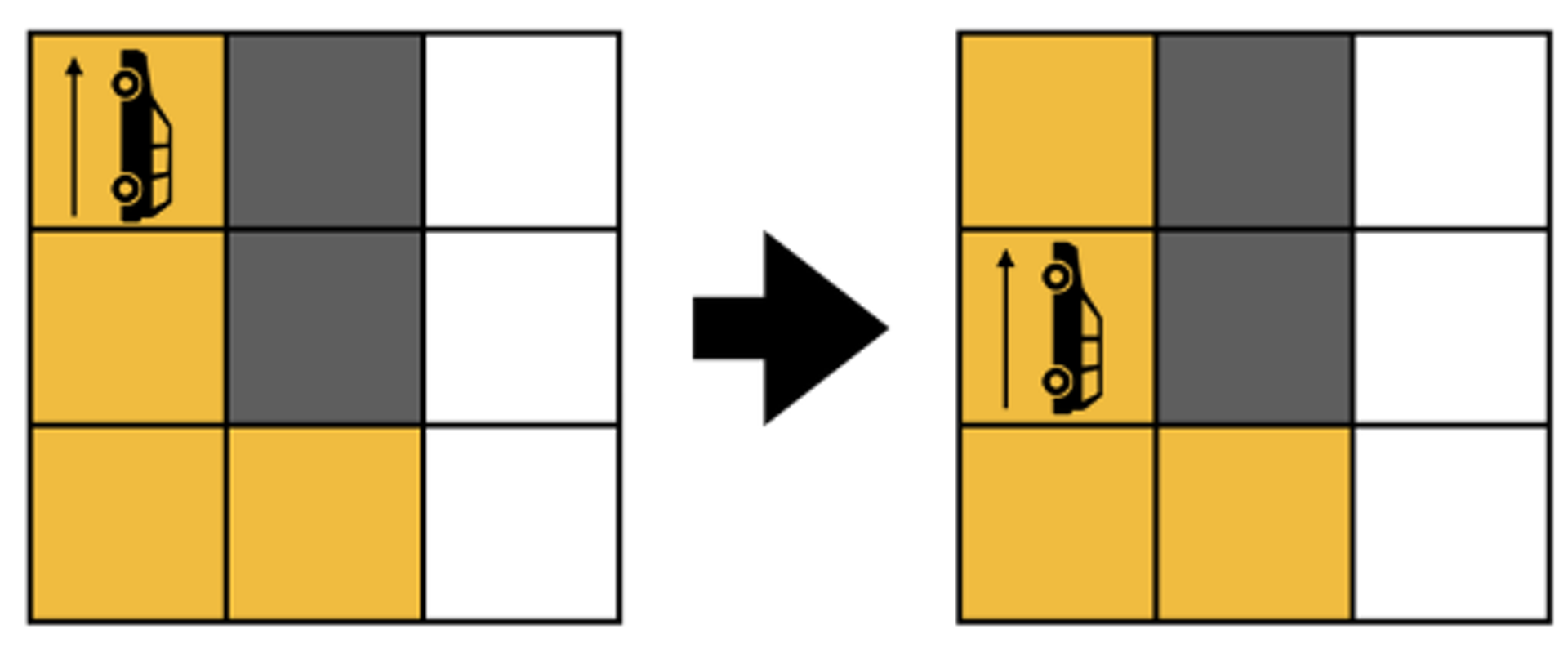
현재 방향을 기준으로 왼쪽으로 간 적이 없으면 좌회전 + 1칸 전진
-
왼쪽이 인도/이미 방문한 경우 좌회전 + 1번 과정 시도
-
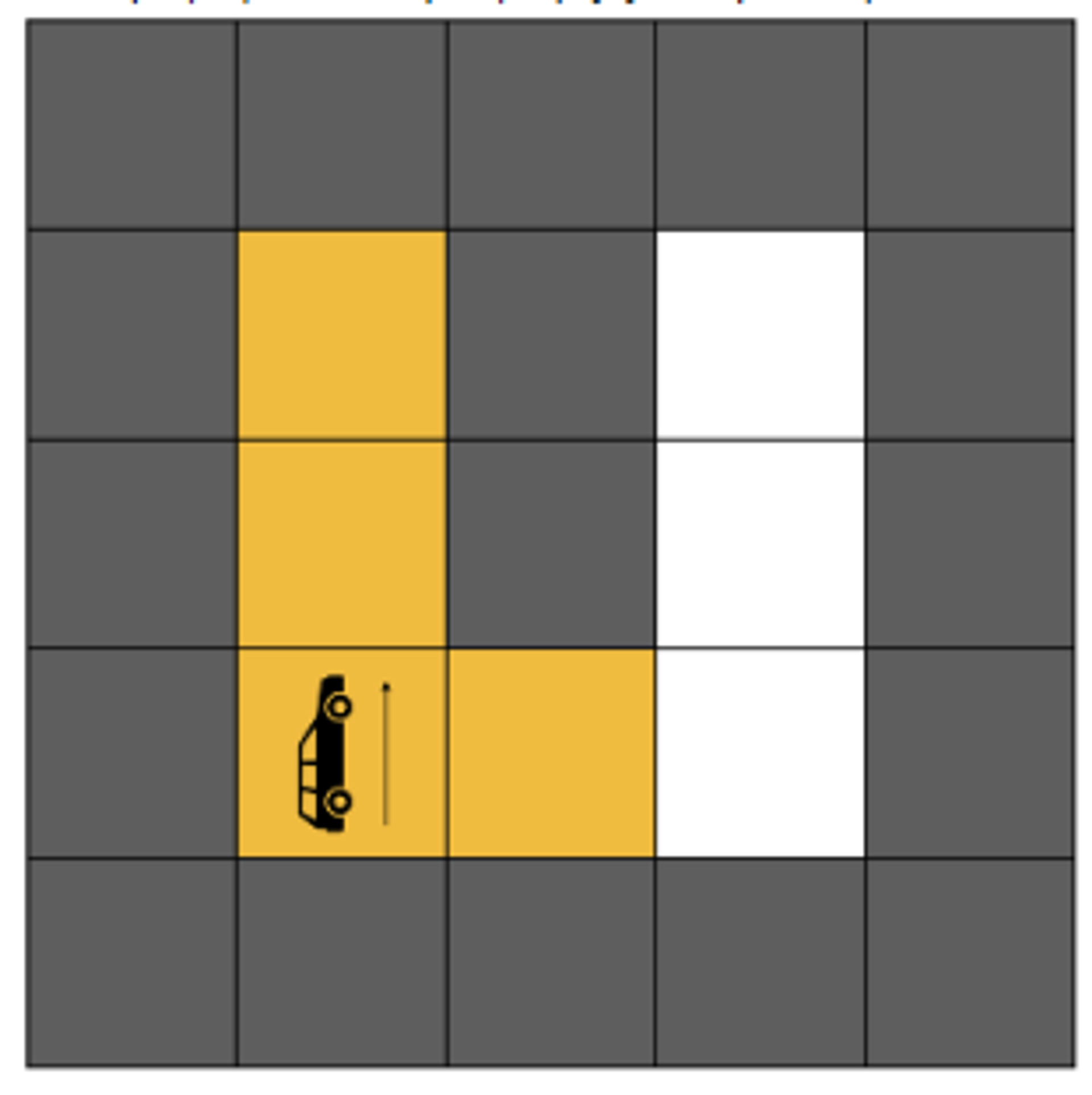
2번에 대해 4방향 모두 확인해도 전진 불가하다면
-
현재 방향 유지한 채로 1칸 후진 + 1번 과정
-
후진을 못하는 상황이면 작동 stop
-
- 입력
- 도로의 세로 크기
n,가로 크기m - 자율주행 자동차의 초기 위치 (
x,y)와 바라보는 방향 dd: 0부터 3까지 숫자로 주어지고, 순서대로 북쪽, 동쪽, 남쪽, 서쪽x: 위쪽에서부터 아래쪽까지 0부터 n-1까지 차례대로 번호y: 왼쪽에서 오른쪽까지 차례대로 번호
- 셋째줄부터 n+2번째 줄까지는 도로의 상태가 주어집니다. 도로는 0, 인도는 1으로 주어집니다.
- 3 ≤ n, m ≤ 50
- 자율주행 자동차가 있는 칸은 도로일 것이라 가정해도 좋습니다.
- 격자의 첫번째 행과 마지막 행, 첫번째 열과 마지막 열은 항상 인도일 것이라고 가정해도 좋습니다.
- 도로의 세로 크기
-
⇒ 자율주행 자동차가 작동을 멈췄을 때 거쳐갔던 도로의 총 면적? (처음 위치의 도로 포함)
2. 풀이
- simulation
while반복문 내에서 좌회전 가능 여부 후 이동 및 후진 진행- 좌회전 시 방향은 N(0) → W(3), W(3) → S(2), S(2) → E(1), E(1) → W(0) 이므로, 좌회전 후 방향은
d = (d + 3) % 4와 같다
3. 코드
n, m = map(int, input().split()) # n = height, m = width
x, y, d = map(int, input().split()) # d = 0 ~ 3 : N E S W
roads = [ list(map(int, input().split())) for _ in range(n)] # 0 : road, 1: sidewalk
visited = [[0]*m for _ in range(n)]
dx = [-1, 0, 1, 0]
dy = [0, 1, 0, -1]
def can_move(x, y):
move = False
if 0 <= x < n and 0 <= y < m and roads[x][y] == 0 and not visited[x][y]:
move = True
return move
visited[x][y] = 1
trial = 0
while True:
d = (d + 3) % 4
nx = x + dx[d]
ny = y + dy[d]
trial += 1
if can_move(nx, ny): # if can move, (in range, is a road, not visited), move (change x, y, reset trial, change visited)#
x, y = nx, ny
trial = 0
visited[x][y] = 1
else: # if can't move, (already visited, out of range)
if trial == 4 : # if trial == 4
nx = x - dx[d]
ny = y - dy[d]
if 0 <= nx < n and 0 <= ny < m and roads[nx][ny] == 0: #if can go backwards, go backwards(change x, y, reset trial)
x = nx
y = ny
visited[x][y] = 1
trial = 0
else: # if can't move backwards, (already visited, out of range)
break
else: # if trial <4
continue
answer = 0
for i in range(n):
for j in range(m):
answer += visited[i][j]
print(answer)