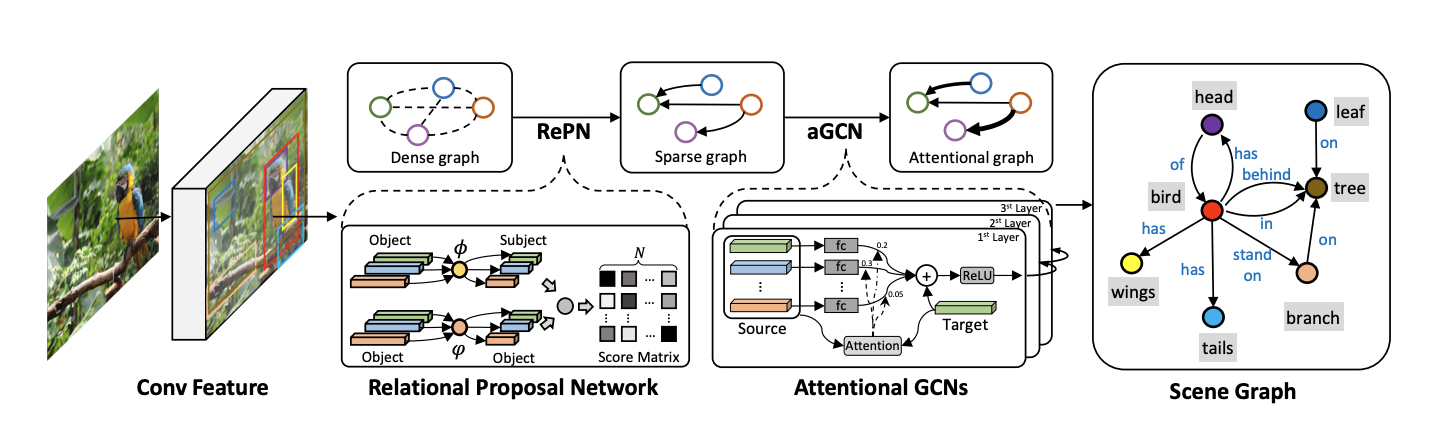
Overview
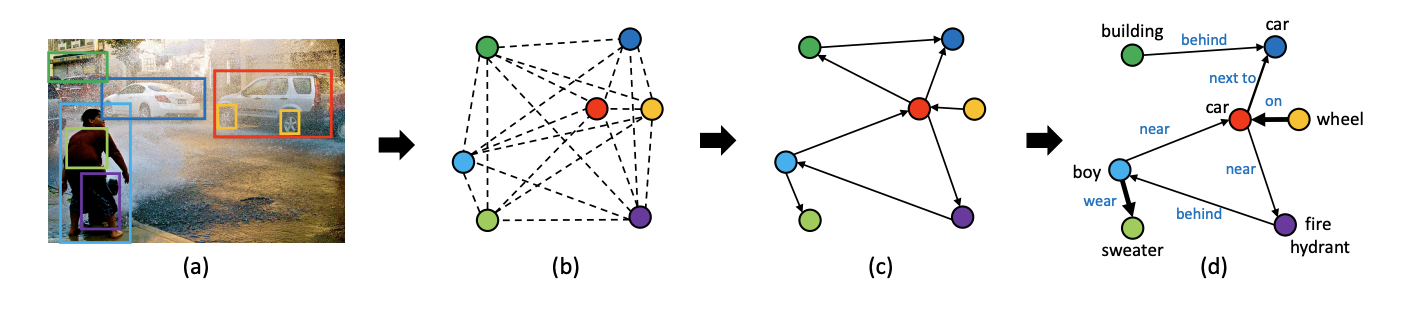
(b) Object node extraction
(c) Relationship edge pruning
(d) Graph context integration
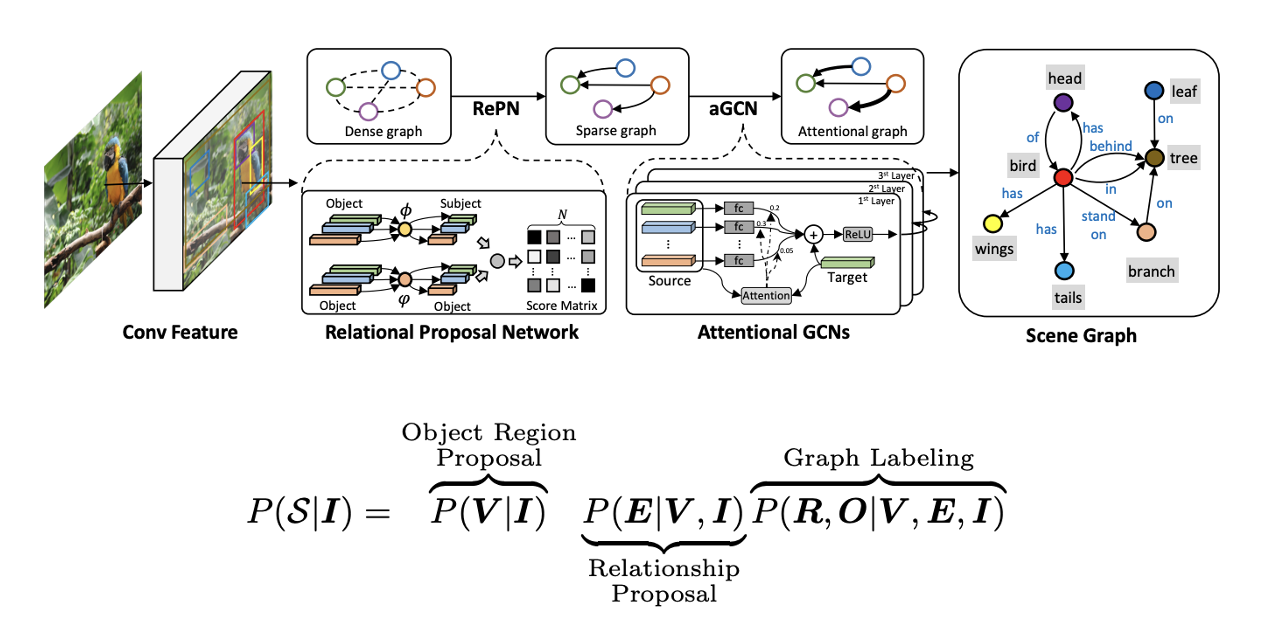
- image
- 이미지 내의 object 노드 집합
- object 간의 relationship
- Object 라벨
- Relationship 라벨
Object Proposals
- Faster R-CNN 활용하여 spatial region 와 feature vector , class에 대한 확률분포 를 추출한다.
Relation Proposal Network
- 개의 object가 있을 때 의 relation이 만들어질 수 있는데 relation proposal network(RePN)을 통해 pruning을 해준다.
- Relation은 클래스에 따라 관계 여부가 결정될 수 있으므로 을 활용한다.
- 는 주어와 목적어를 구별하기 위한 projection function이다.
- 모든 pair는 sigmoid를 거쳐 나온 0~1 사이의 score를 가지며 내림차순으로 정렬 후 개의 pair를 NMS 한 결과 sparse한 를 만든다.
- 엣지에는 object pair의 union box의 feature를 추출한 visual representations이 담긴다.
: relation의 수
Attentional GCN
Vanila GCN
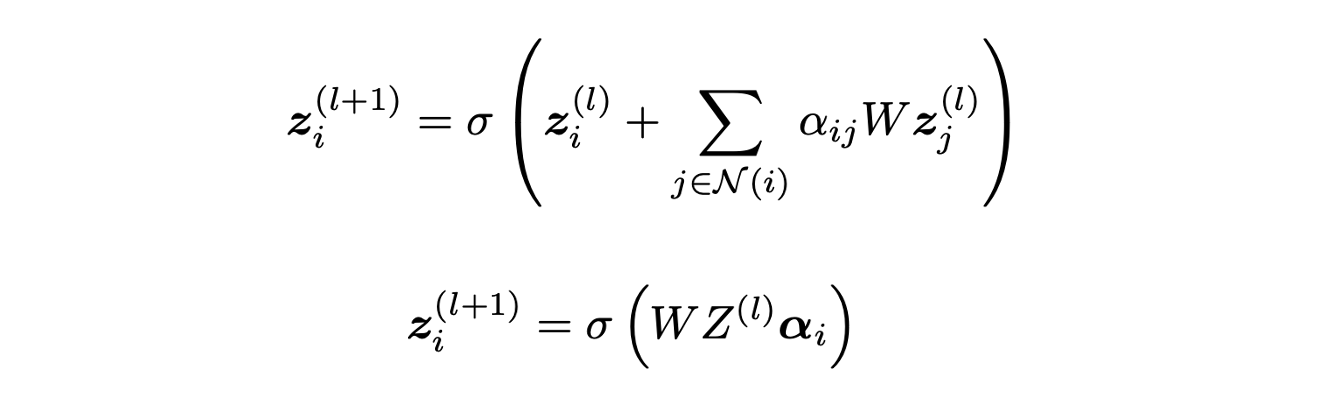
- 노드 의 representation 는 이웃노드들 를 선형변환 후 가중치 를 준 후 더해 update 한다.
- 는 0~1 사이의 값으로 feature의 symmetically normalized adjacency matrix에 의해 미리 계산된다.
aGCN

- aGCN에서는 concat 한 node feature를 2-layer MLP에 통과시킨 후 softmax를 취해 를 구한다.
aGCN for Scene Graph Generation
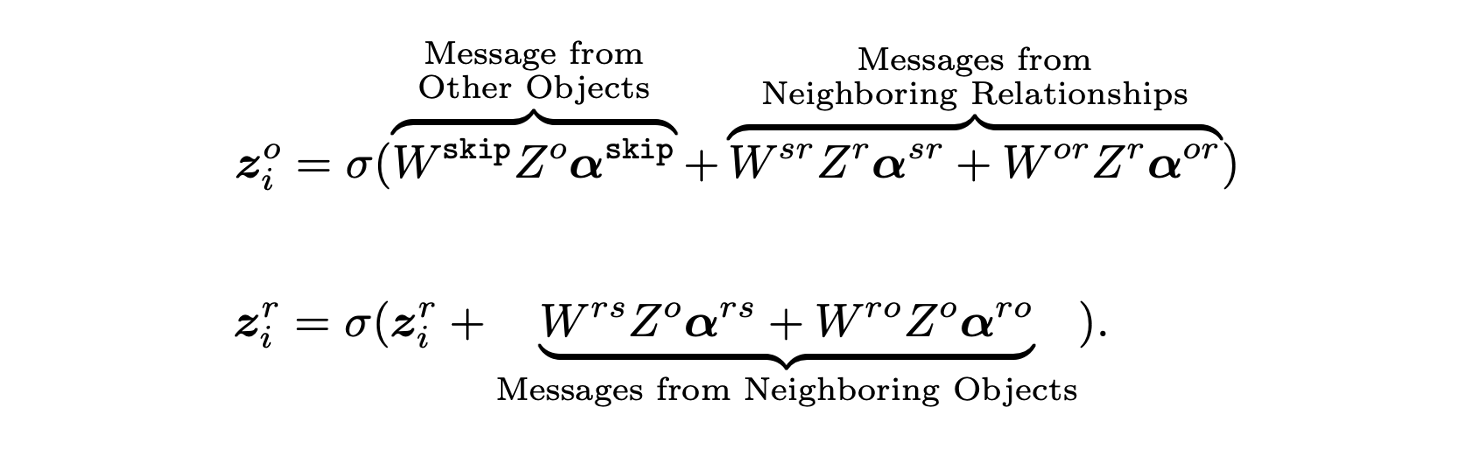
- 개의 object node와 개의 relationships에 추가로 모든 object nodes끼리 skip-connect edge를 연결시켜 global context를 고려한 representation update를 해준다.
