문제 분류
: 상태값 분류 하는 구현문제.
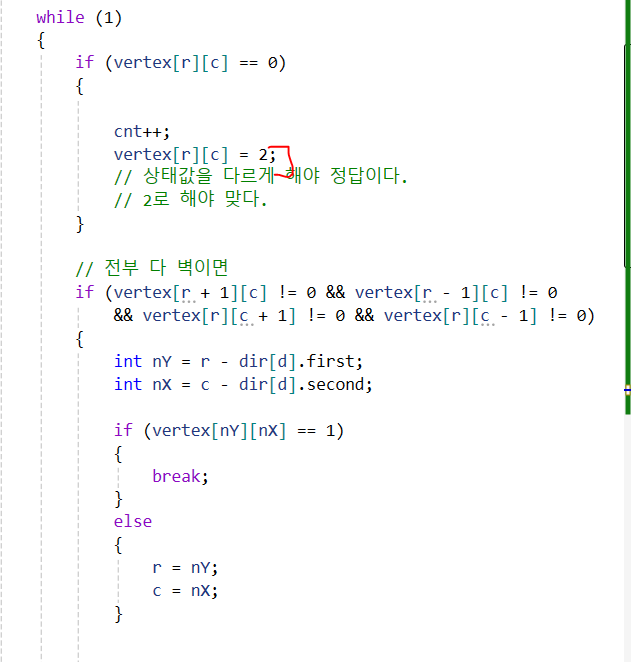
왜 틀림
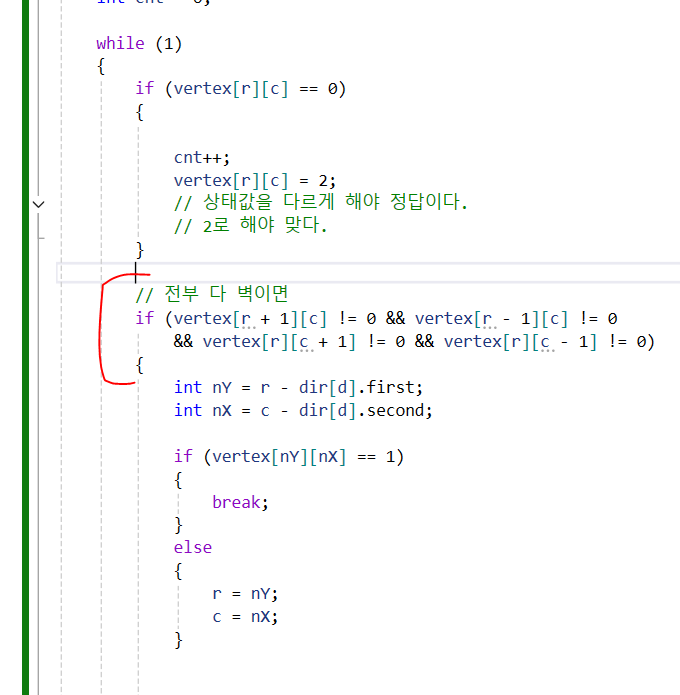
: 로봇청소기가 청소를 하면 나는 1로 설정했는데,
1은 벽이다. 다른 값으로 설정해야 한다.
- 벽인 상태값만 부딪쳤을 때 멈추게 해야 한다.
: 여기서 멈출 수 있다는 것이다.
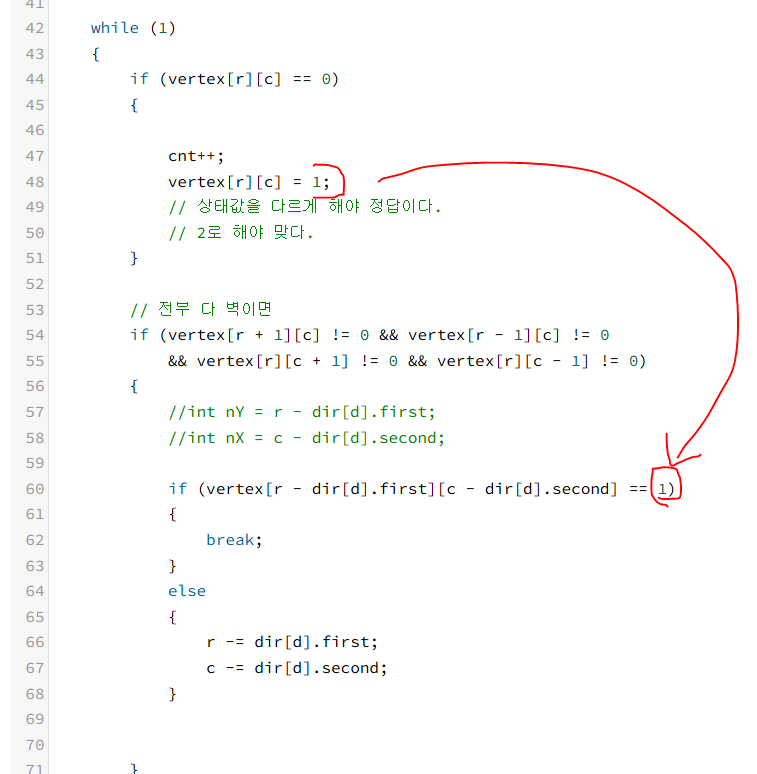
- 문제에서도 로봇청소기가 청소를 했을 때 벽이 된다. 는 말 이없다.
문제 맨 처음에 풀 때 걱정거리
-
인덱스 벗어날까봐 걱정했는데, 별 문제 없이 된다.
-
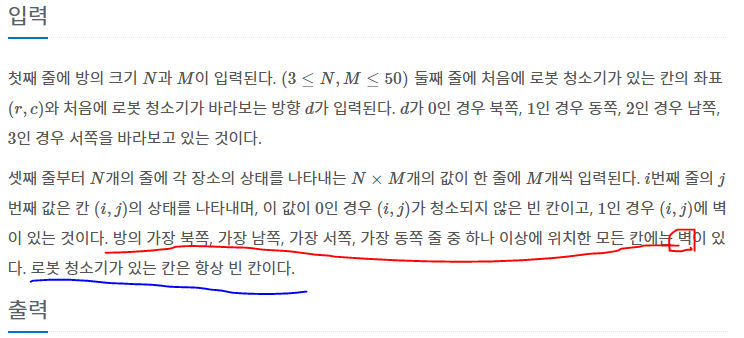
0)번
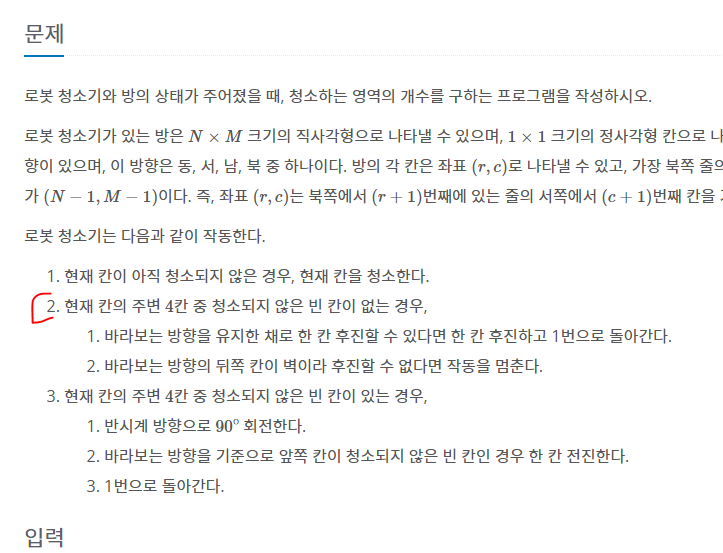
로봇청소기는 일단 빈칸에서 시작하는데, 빈칸인 곳에서 시작하고,
테두리는 모두 벽이다.
-
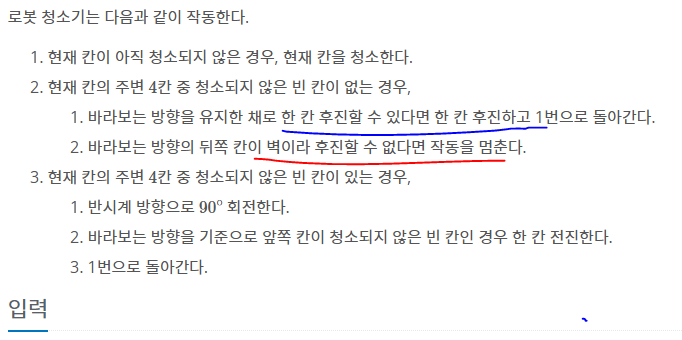
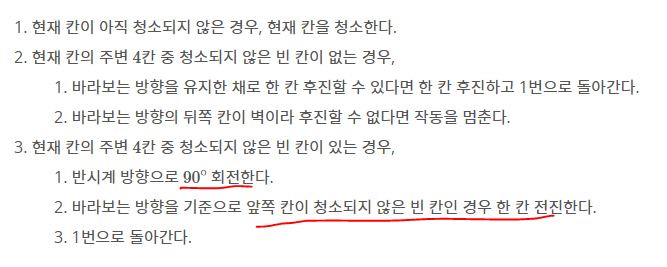
1) 물체가 이동하는 조건도 자세히 보면,
후진할 수 있다면 후진이고, 뒤에 벽이라면 멈춘다.
-
2) 회전을 한 다음에 청소되지 않았어? 그럼 이동한다는 조건만 있기 때문에
-
결론
: 매번 범위체크를 할 필요가 없다.
문제에서 조건 처리할때
-
4개가 전부 청소되지 않은 빈칸이 없는 경우라고 해서
나는 for문을 돌렸는데, 굳이 이렇게 안해도 된다.
-
-> 한번에 그냥 4개 싹다 동시에 확인했다.
결론
- 상태값을 어떻게 설정하냐에 따라서 맞냐? 틀리냐? 결정된다.
아무 생각없이 동일한 벽 상태로 하면 안된다!

🔥🔥🔥