[컴퓨터비전 STUDY / KOCW 한동대학교 황성수 교수님 강의 Review]
본 강의는 OpenCV에서 딥러닝을 이용하여 물체를 검출하는 방법에 대해서 다룬다.
Deep learning in openCV
버전 3.3부터는 openCV에서 딥러닝을 사용할 수 있다.
-
openCV는 Caffe, TensorFlow, Darknet, Torch/PyTorch와 같은 많은 딥 러닝 프레임워크를 지원한다.
-
사전에 훈련된 딥러닝 모델을 사용하여 C++, Python에서 사용할 수 있다.
그렇다면 openCV에서 deep learning을 어떻게 이용할 수 있을까?
-
deep learning model을 로드한다.
-
input image를 deep learning에서 처리하기 적합한 blob 형태로 처리한다.
(참고로, blob은 딥러닝에서 사용되는 Image를 의미함) -
입력 blob을 전파하여 분류 결과를 가져온다.
YOLO
딥러닝 모델을 다음과 같이 로드한다.
String modelConfiguration = "yolov2.cfg";
String modelBinary = "yolov2.weights";
Net net = readNetFromDarkernet(modelConfiguration, modelBinary);readNetFromDarknet(const String & cfgFile, const String & darknetModel=String())
신경망의 구조를 정의하는 .cfg 파일과 가중치를 포함하는 .weights 파일을 입력으로 받는다. 이 함수를 통해서 훈련된 신경망을 로드할 수 있다.
다음은 deep learning 모델에 적합한 blob 형태로 이미지를 처리하는 과정이다.
Mat inputBlob = blobFromImage(frame, 1 / 255.F, Size(416, 416), Scalar(), true, false);blobFromImage(InputArray image, double 1.0, const Size & size = size(), const Scalar & Scalar(), bool swapRB=true, bool crop=true, int ddepth=CV_32F)
이미지를 신경망이 처리할 수 있는 형태로 변환해 주며, double을 통해서 픽셀 값을 0~1 사이로 정규화하고, size()에 맞추어 이미지 크기를 지정해준다. 또한, Scalar는 평균값을 빼서 데이터를 정규화하는데 사용되며, swapRB가 true이면 BGR을 RGB로 변환해준다.
그 이후, input blob을 전파하여 분류 결과를 가져온다.
net.setInput(inputBlob, "data");
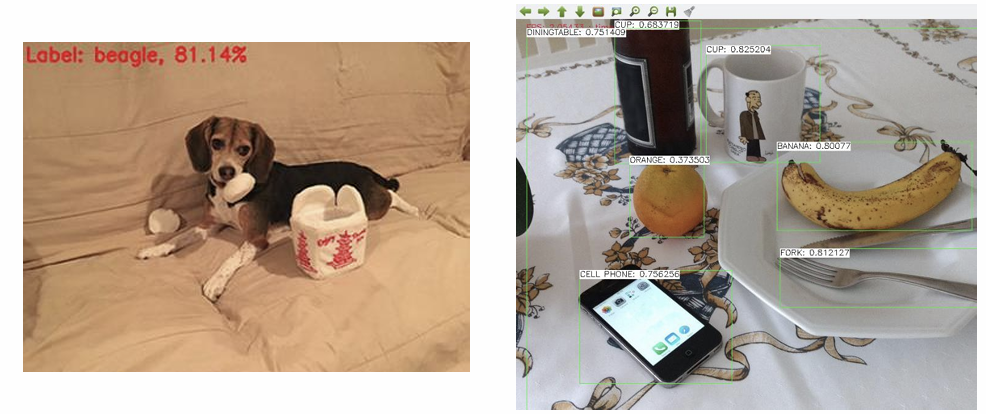
Mat detectionMat = net.Forward("detection_out"); // 실제 검출GoogleNet은 이미지에서 물체를 분류하며, yolo는 이미지에서 물체를 검출한다.
다음은 YOLO를 수행하는 Example code 이다.
int main(int argc, char** argv)
{
String modelConfiguration = "deep/yolov2.cfg"; // YOLO 구성 파일
String modelBinary = "deep/yolov2.weights"; // 가중치 파일
Net net = readNetFromDarknet(modelConfiguration, modelBinary); // 신경망 불러들임
VideoCapture cap("downtown_road.wmv"); // 비디오 파일 읽음
vector<String> classNamesVec;
ifstream classNamesFile("deep/coco.names"); // 인식할 수 있는 객체의 클래스 이름을 로드함
if (classNamesFile.is_open()) {
string className = "";
while (std::getline(classNamesFile, className)) classNamesVec.push_back(className);
}
while (1)
{
Mat frame;
cap >> frame; // get a new frame from camera/video or read image
if (frame.empty()) {
waitKey();
break;
}
if (frame.channels() == 4) cvtColor(frame, frame, COLOR_BGRA2BGR); // 4채널 이미지의 경우, 3채널(BGR)로 변환함
//Convert Mat to batch of images
Mat inputBlob = blobFromImage(frame, 1 / 255.F, Size(416, 416), Scalar(), true, false);
net.setInput(inputBlob, "data"); //set the network input
Mat detectionMat = net.forward("detection_out"); //compute output
float confidenceThreshold = 0.24; //by default
for (int i = 0; i < detectionMat.rows; i++) {
const int probability_index = 5;
const int probability_size = detectionMat.cols- probability_index;
float *prob_array_ptr = &detectionMat.at<float>(i, probability_index);
size_t objectClass = max_element(prob_array_ptr, prob_array_ptr + probability_size) - prob_array_ptr;
//특정한 물체가detection된 확률
float confidence = detectionMat.at<float>(i, (int)objectClass + probability_index);
//For drawing
if (confidence > confidenceThreshold) {
// 바운딩 박스를 그림
float x_center = detectionMat.at<float>(i, 0) * frame.cols;
float y_center = detectionMat.at<float>(i, 1) * frame.rows;
float width = detectionMat.at<float>(i, 2) * frame.cols;
float height = detectionMat.at<float>(i, 3) * frame.rows;
Point p1(cvRound(x_center- width / 2), cvRound(y_center- height / 2));
Point p2(cvRound(x_center + width / 2), cvRound(y_center + height / 2));
Rect object(p1, p2);
Scalar object_roi_color(0, 255, 0);
rectangle(frame, object, object_roi_color);
String className = objectClass < classNamesVec.size() ?
classNamesVec[objectClass] : cv::format("unknown(%d)", objectClass);
String label = format("%s: %.2f", className.c_str(), confidence);
int baseLine = 0;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
rectangle(frame, Rect(p1, Size(labelSize.width, labelSize.height + baseLine)),
object_roi_color, FILLED);
putText(frame, label, p1 + Point(0, labelSize.height), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 0, 0));
}
}
imshow("YOLO: Detections", frame);
if (waitKey(1) >= 0) break;
}
return 0;
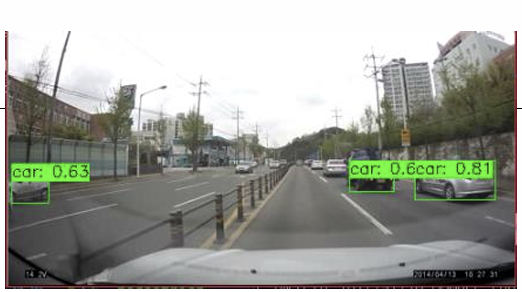
}결과는 다음과 같다.