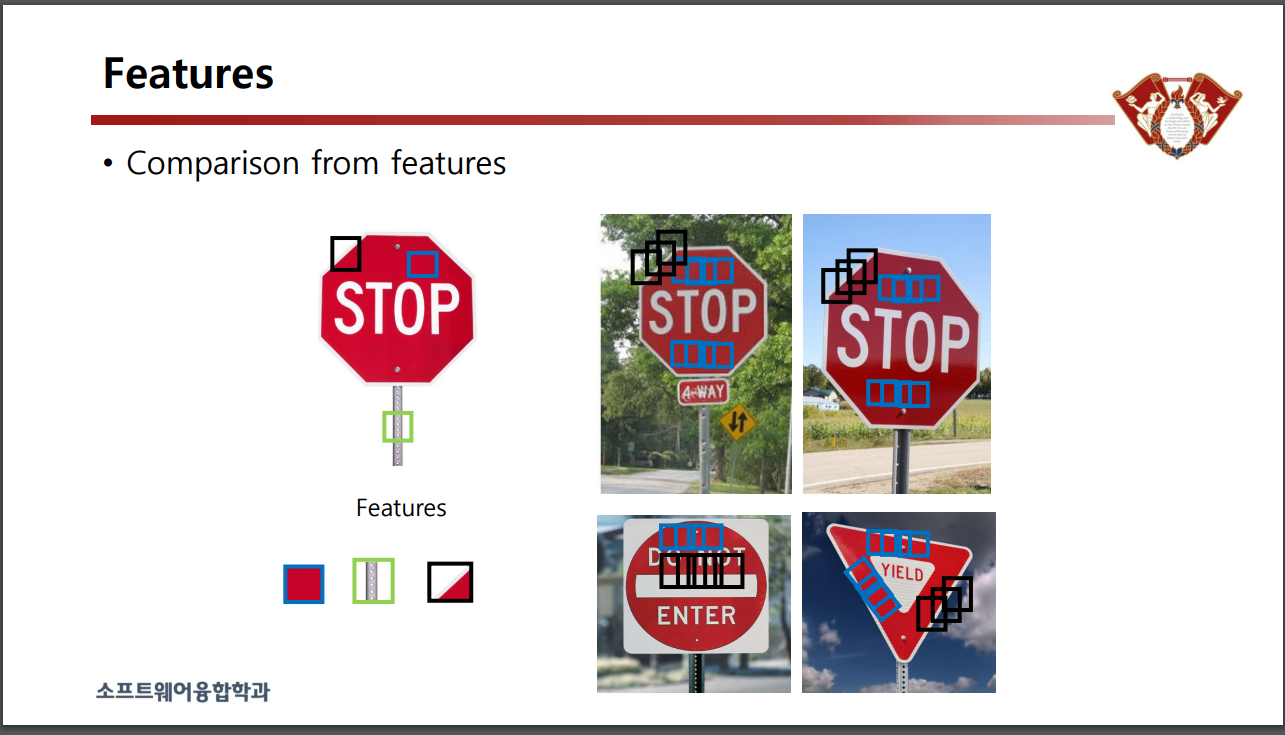
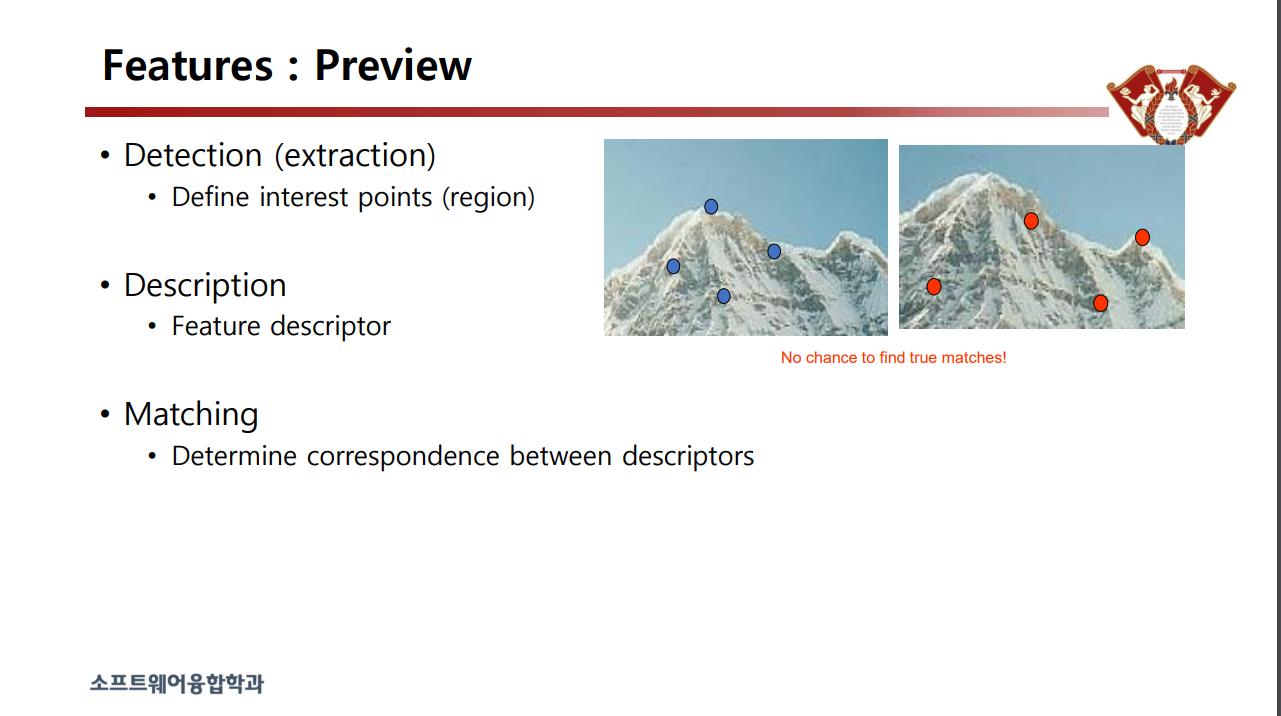
특징
-감지, 추출
-묘사
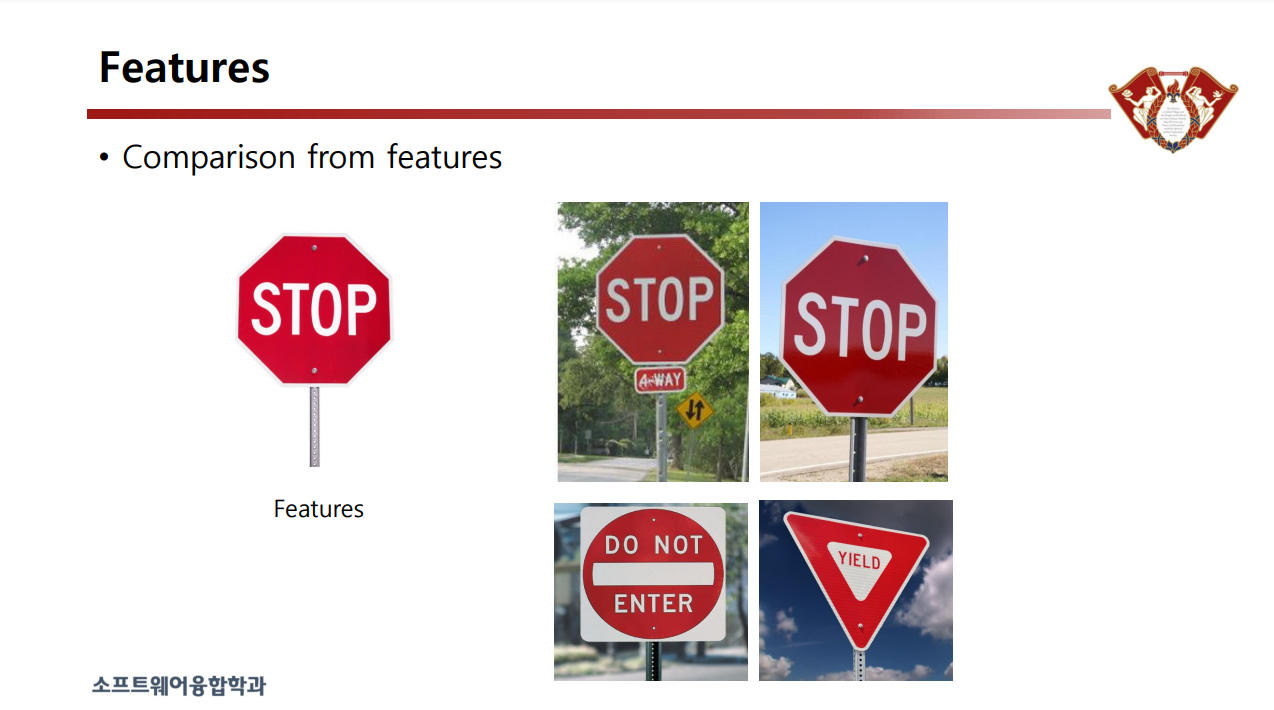
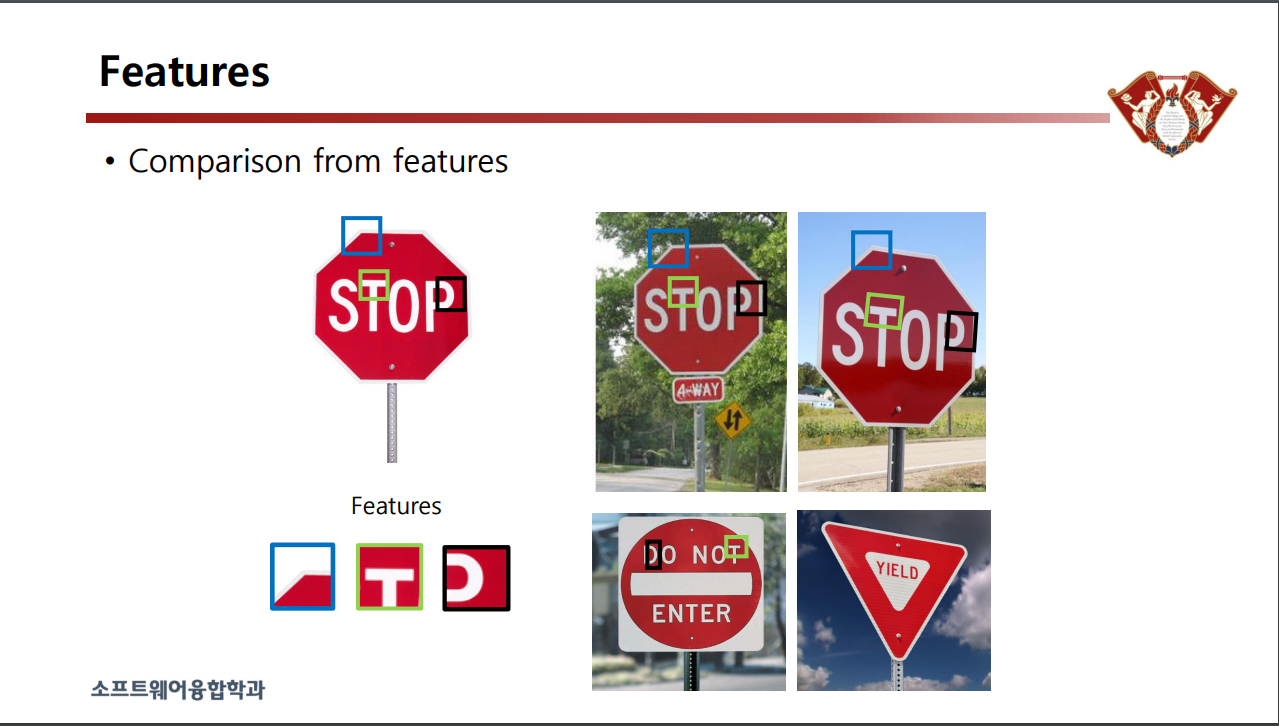
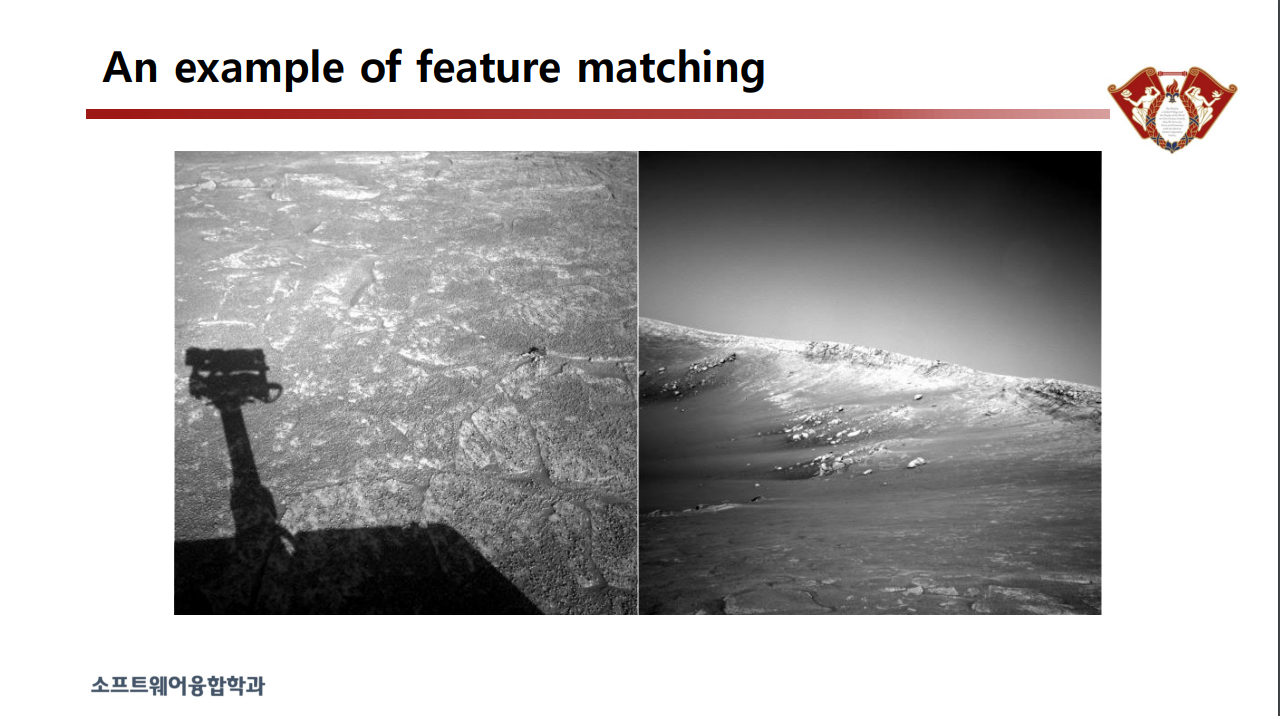
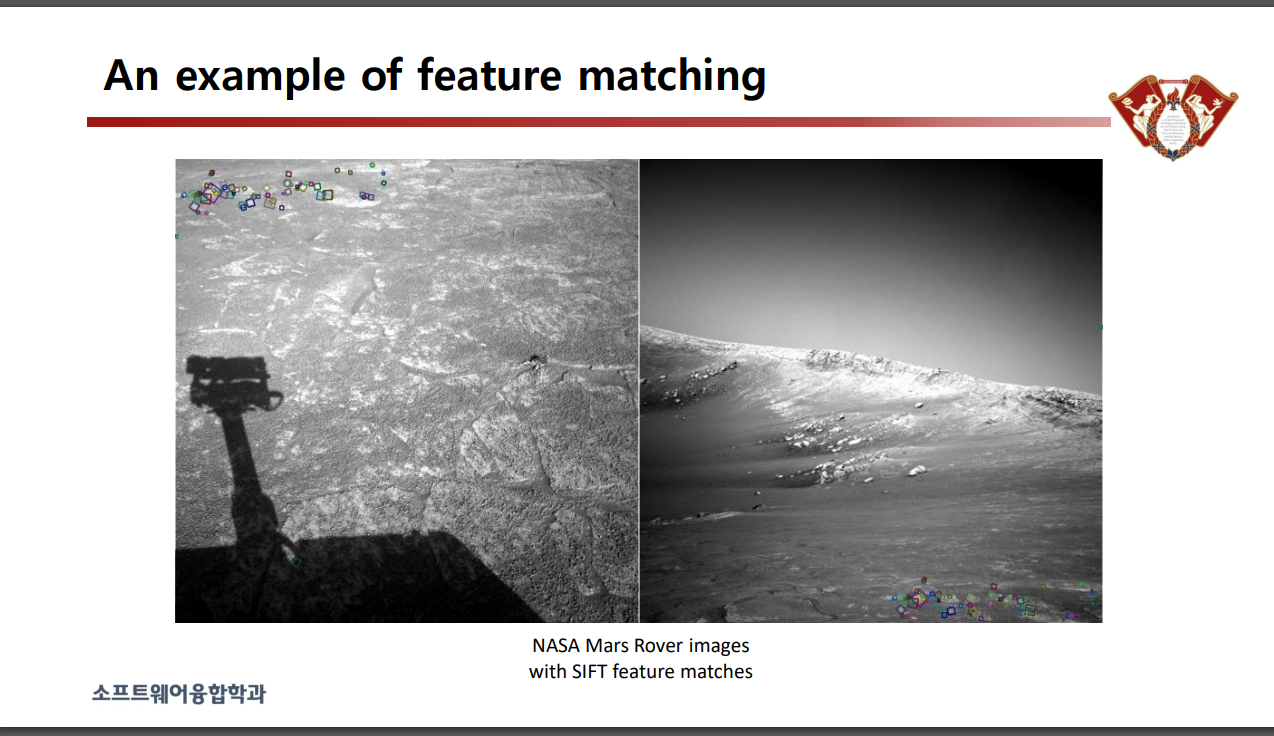
-매칭
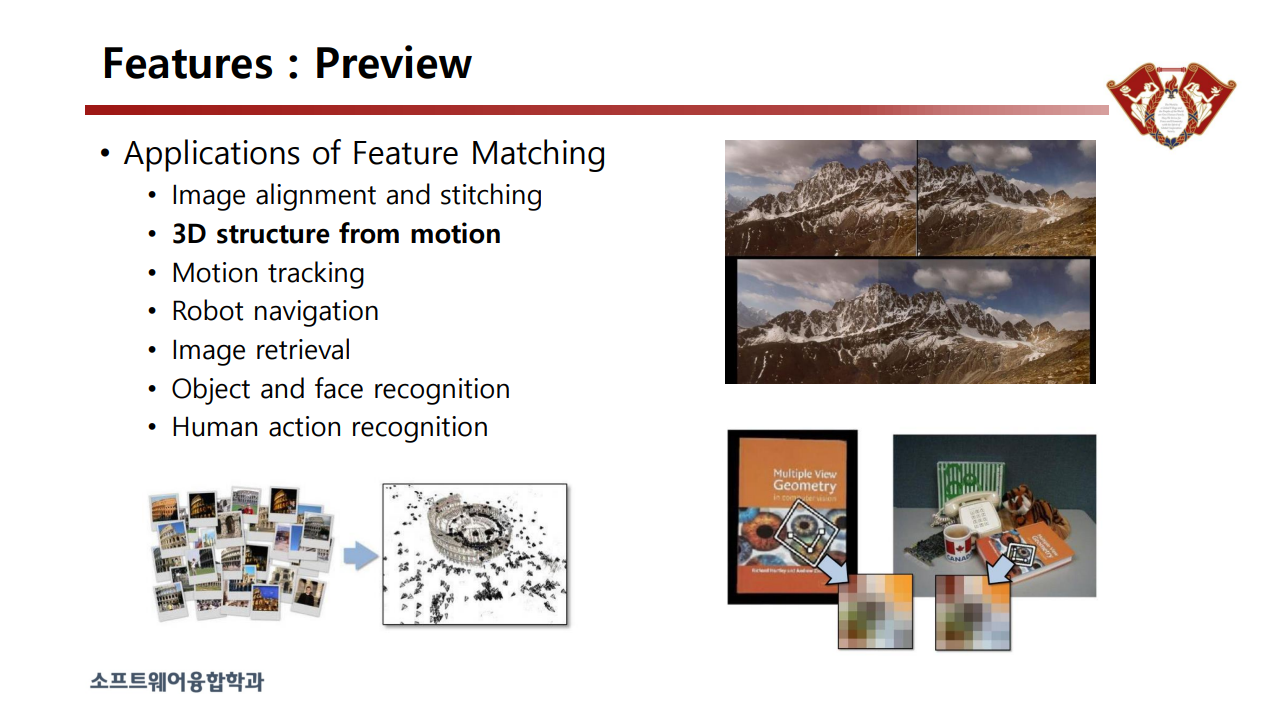
특징 매칭의 적용
-모션으로부터의 3D 구조
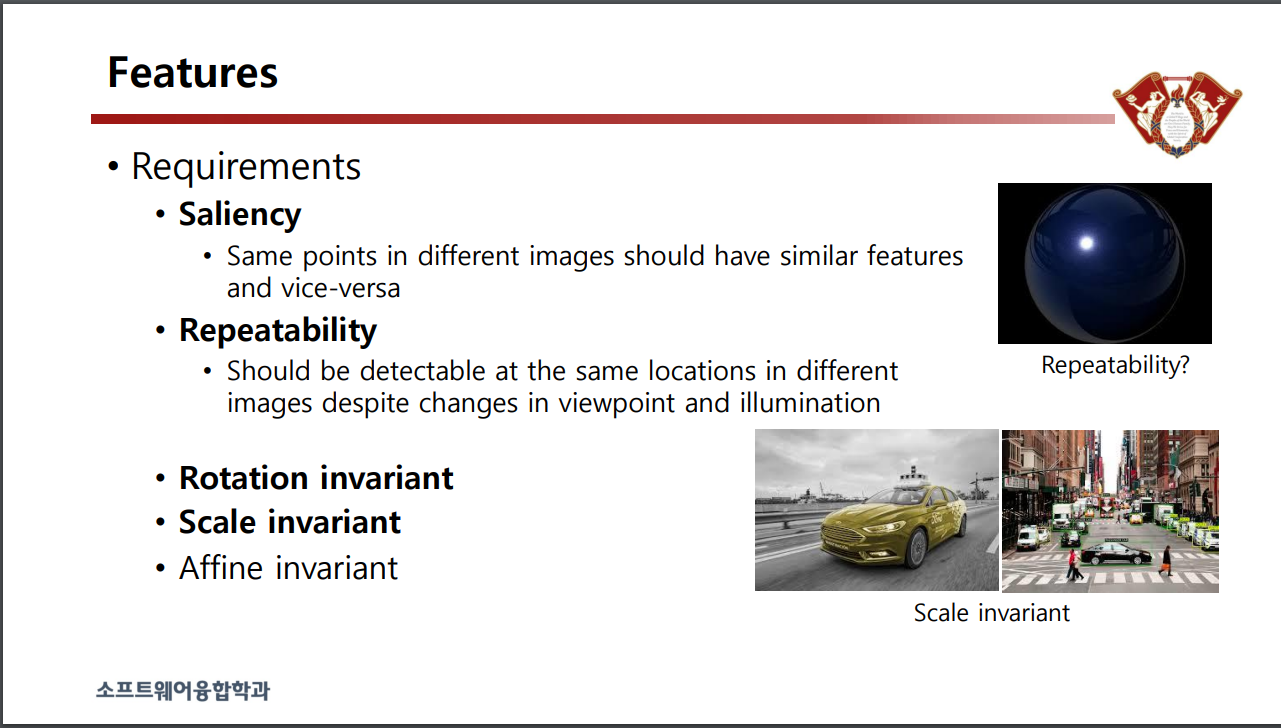
특징의 요구사항
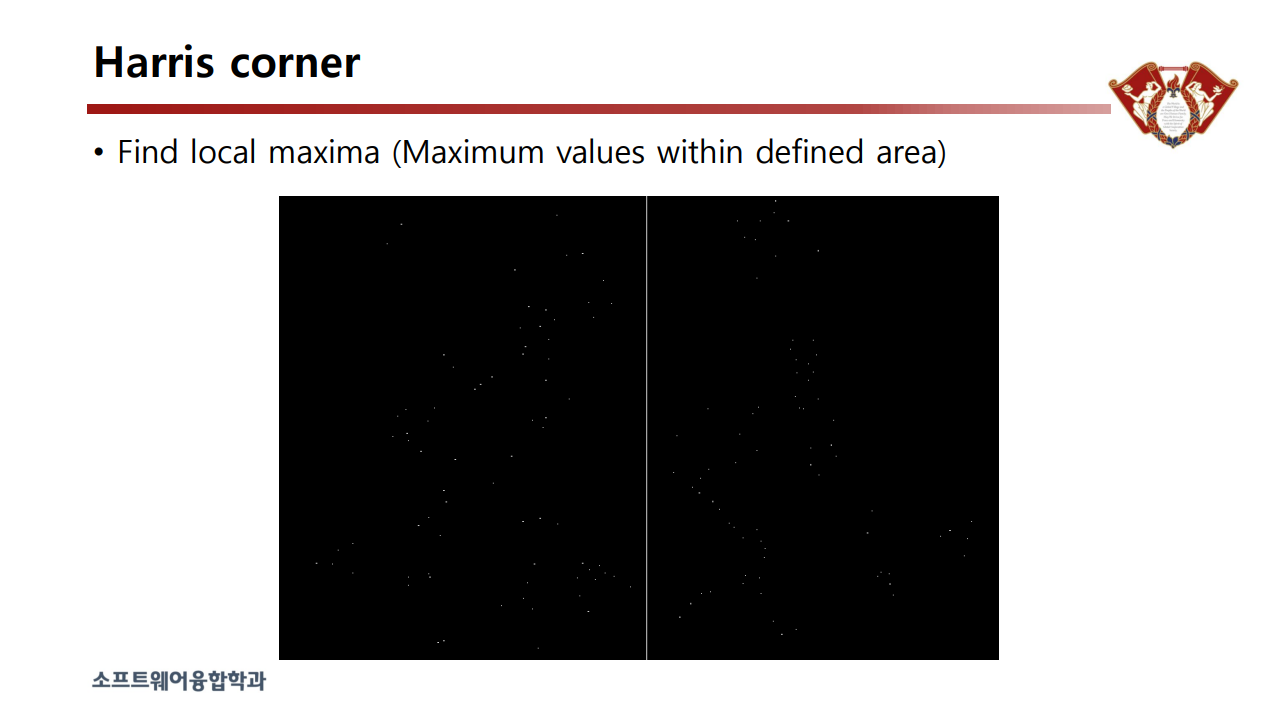
-두드러짐
-반복성
-Rotation invariant : 회전 상관없음
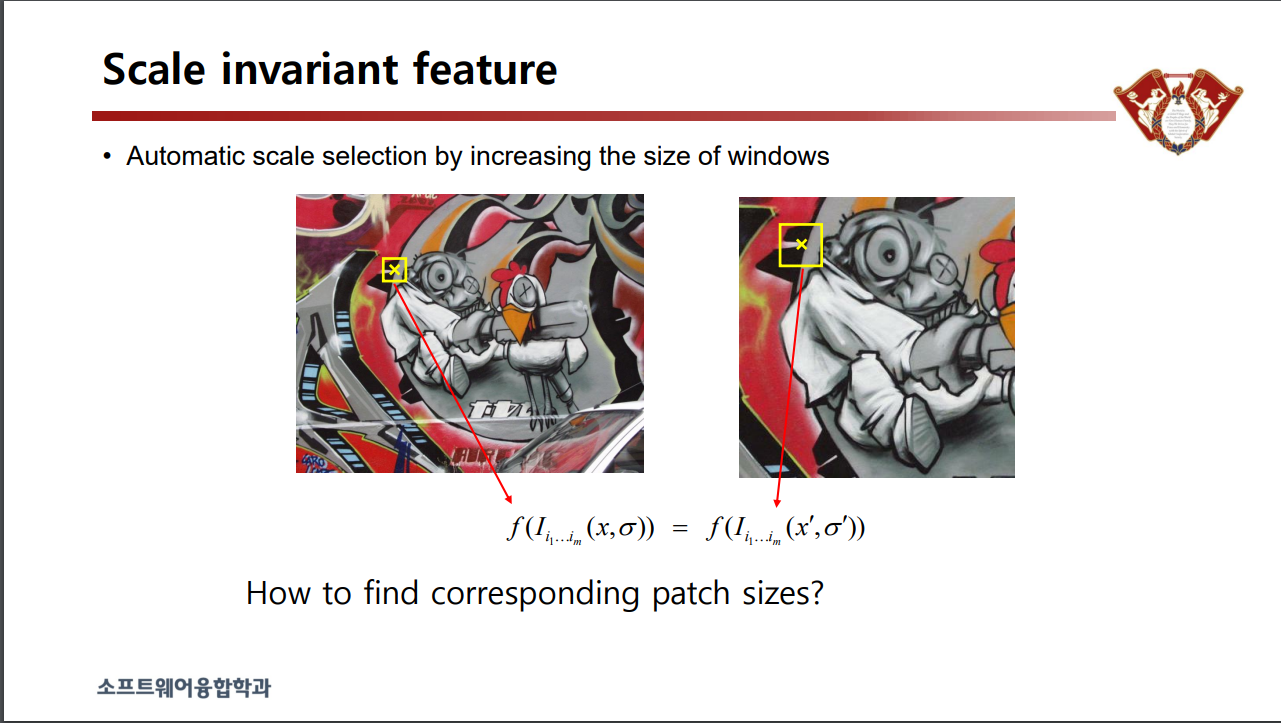
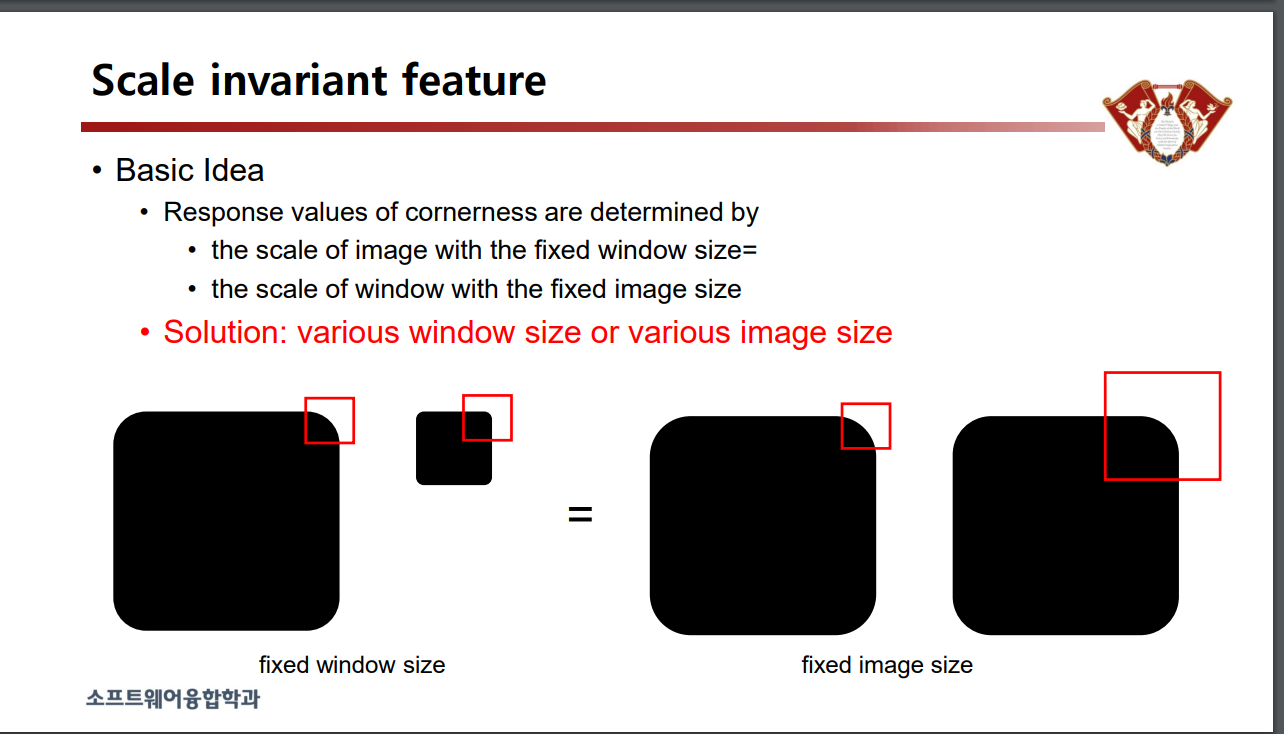
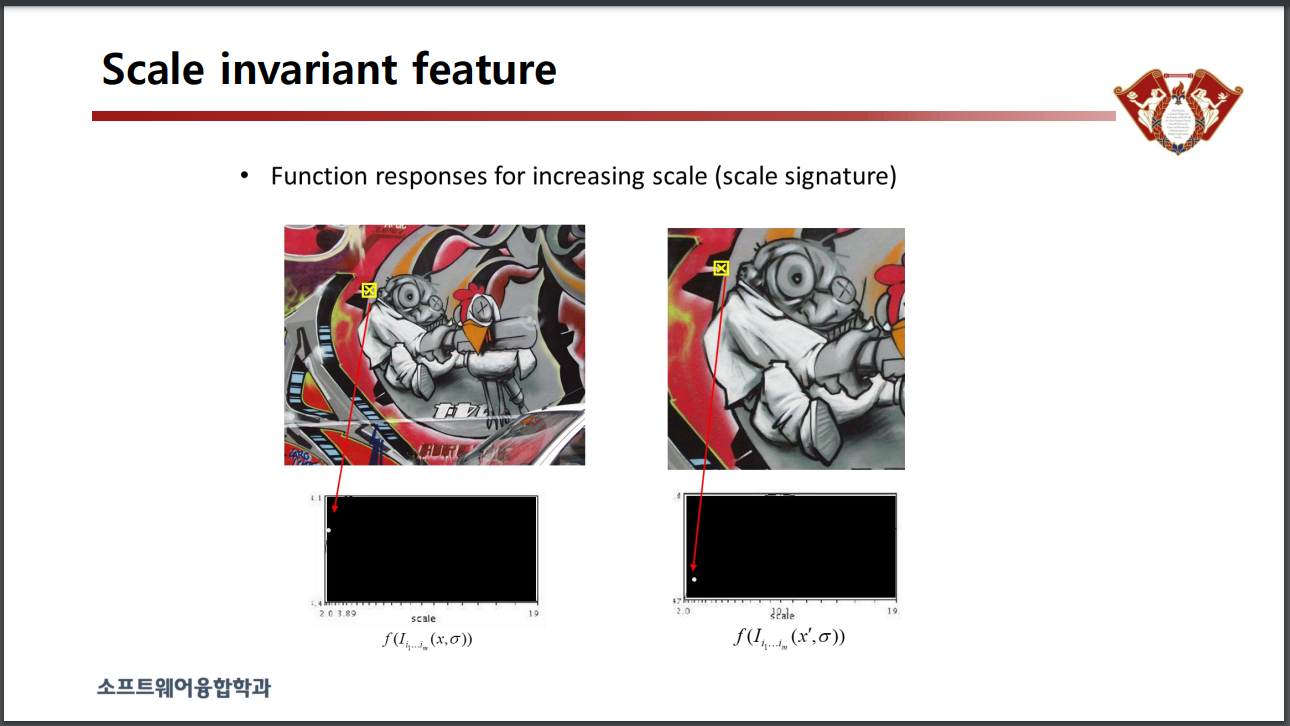
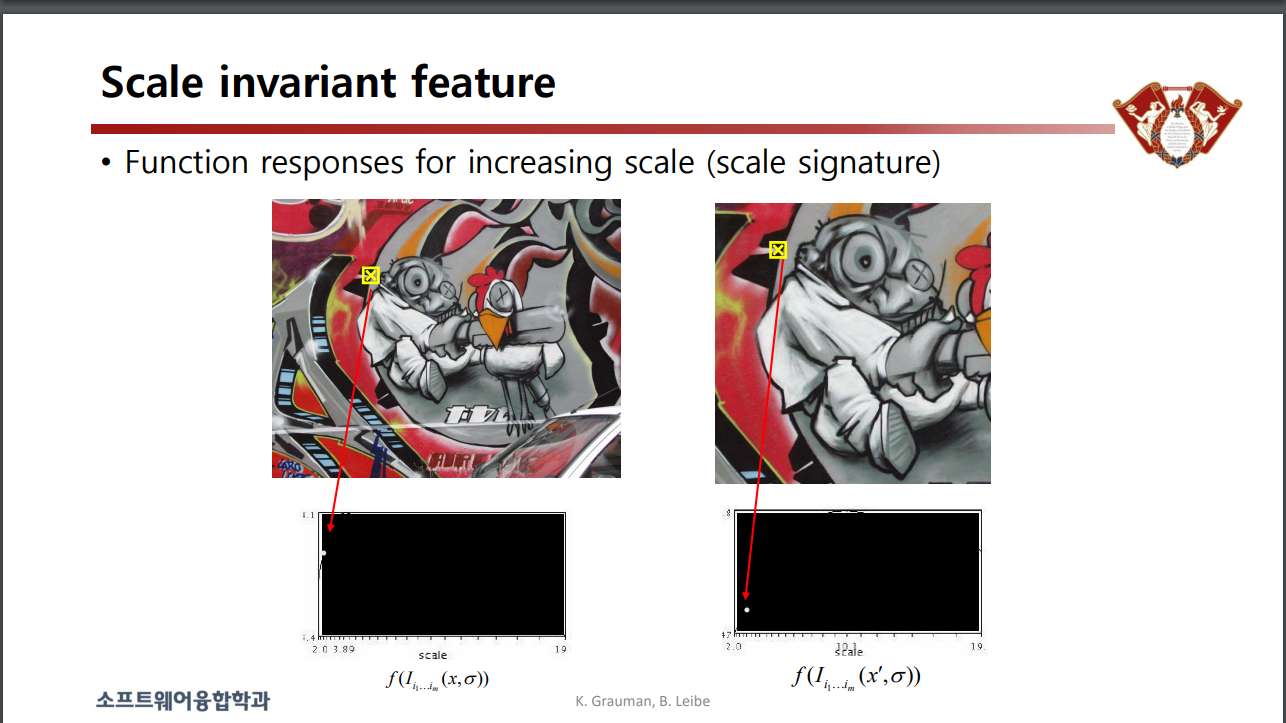
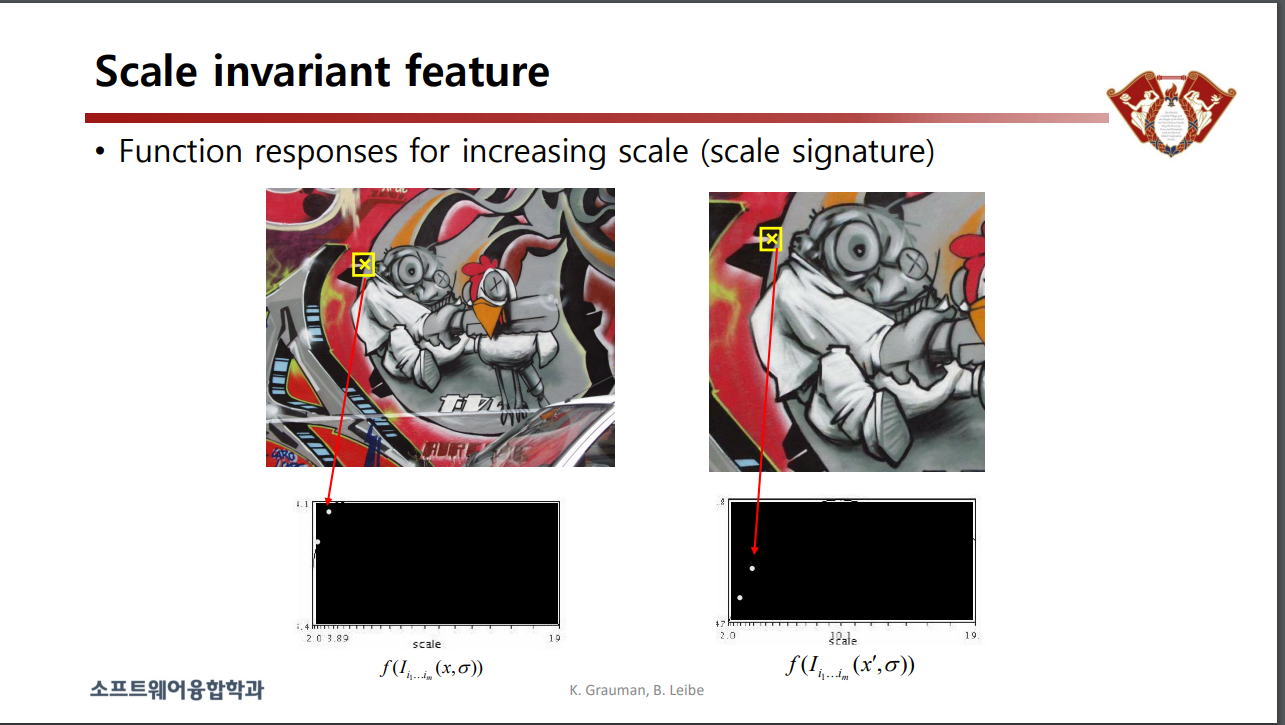
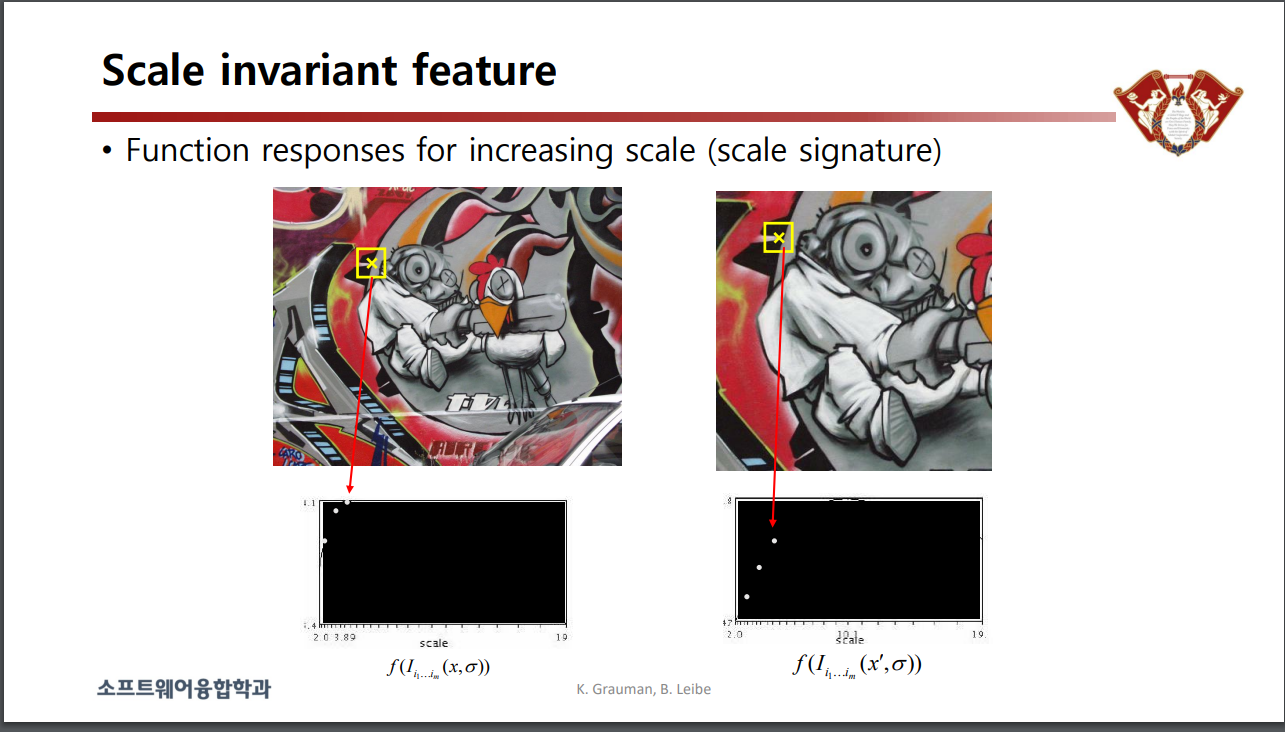
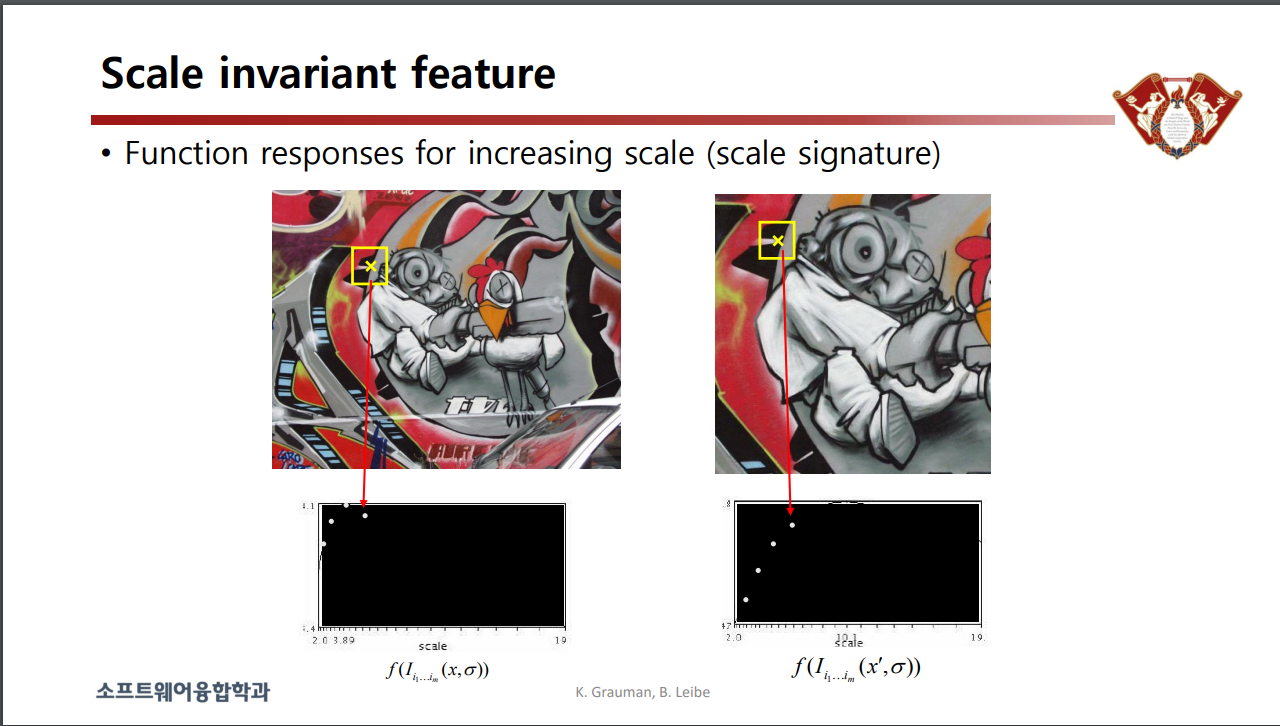
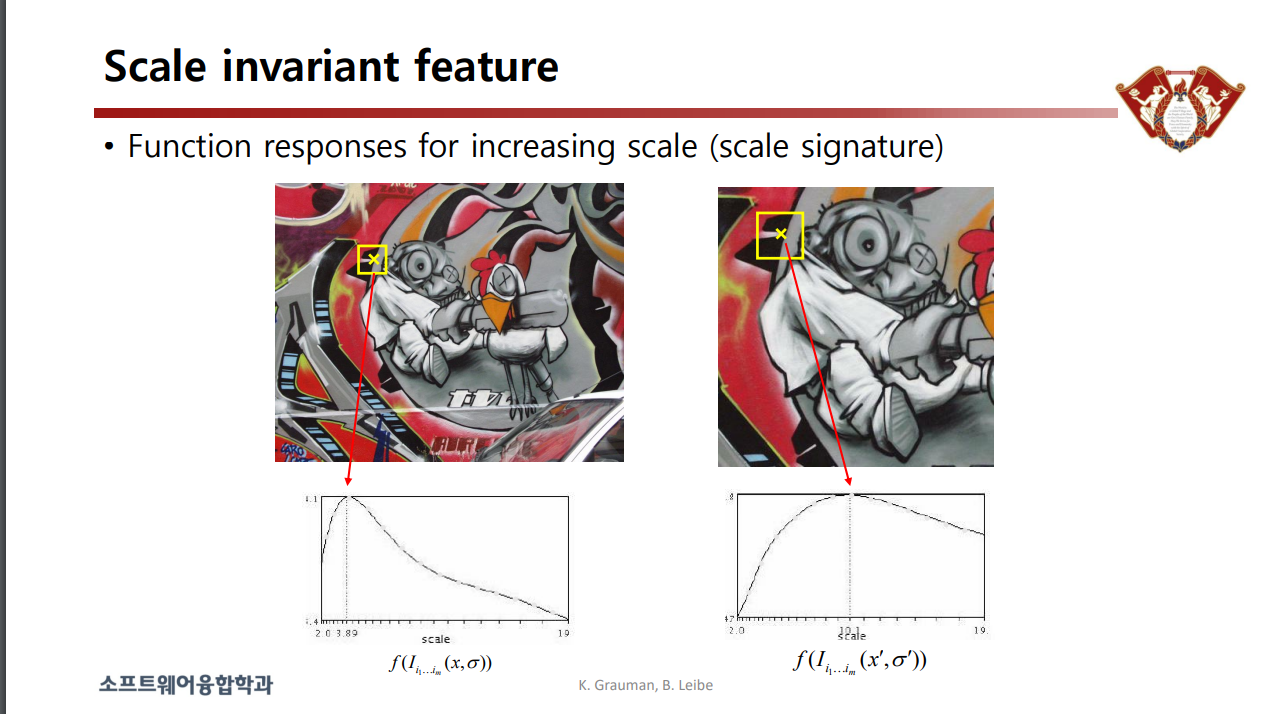
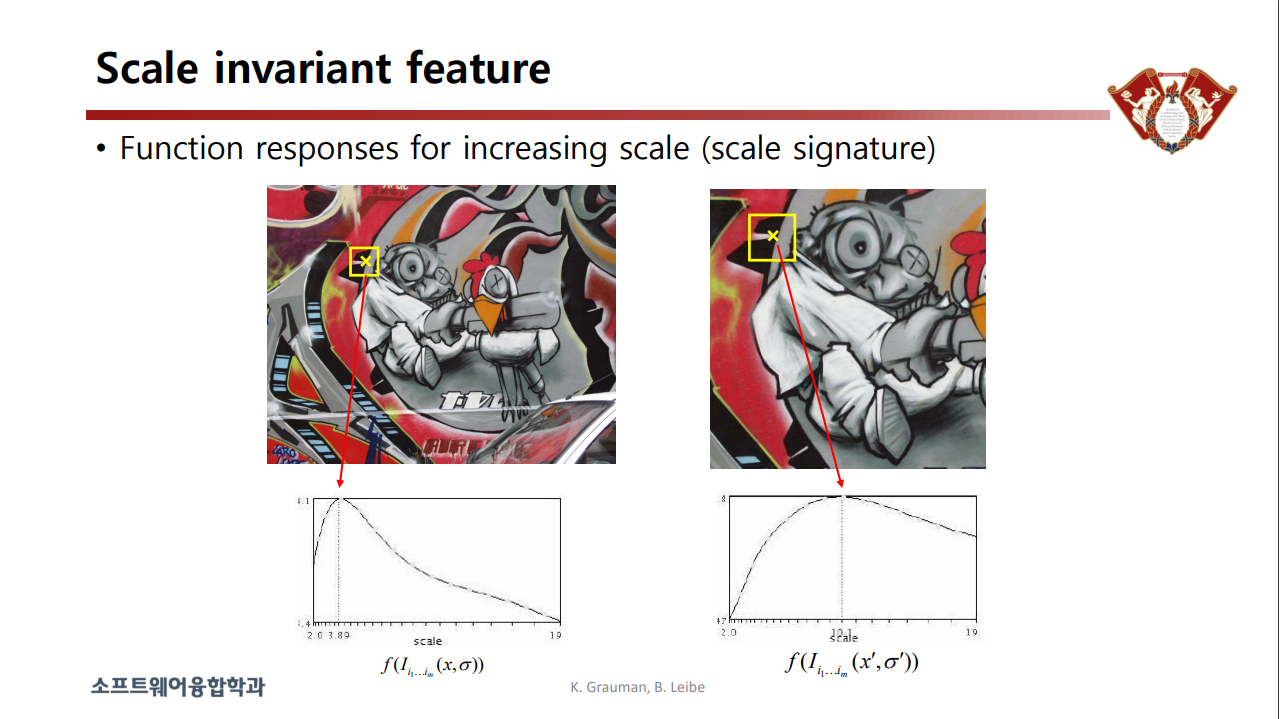
-스케일 상관없음
-아핀 무관
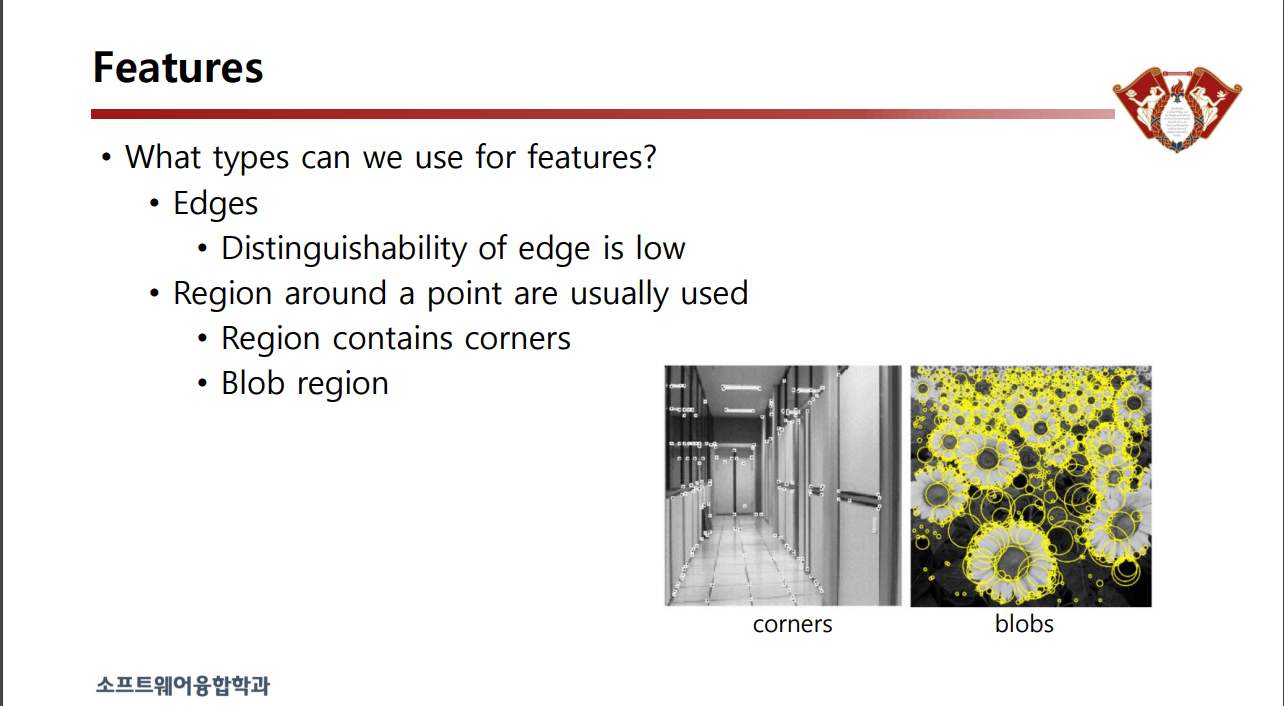
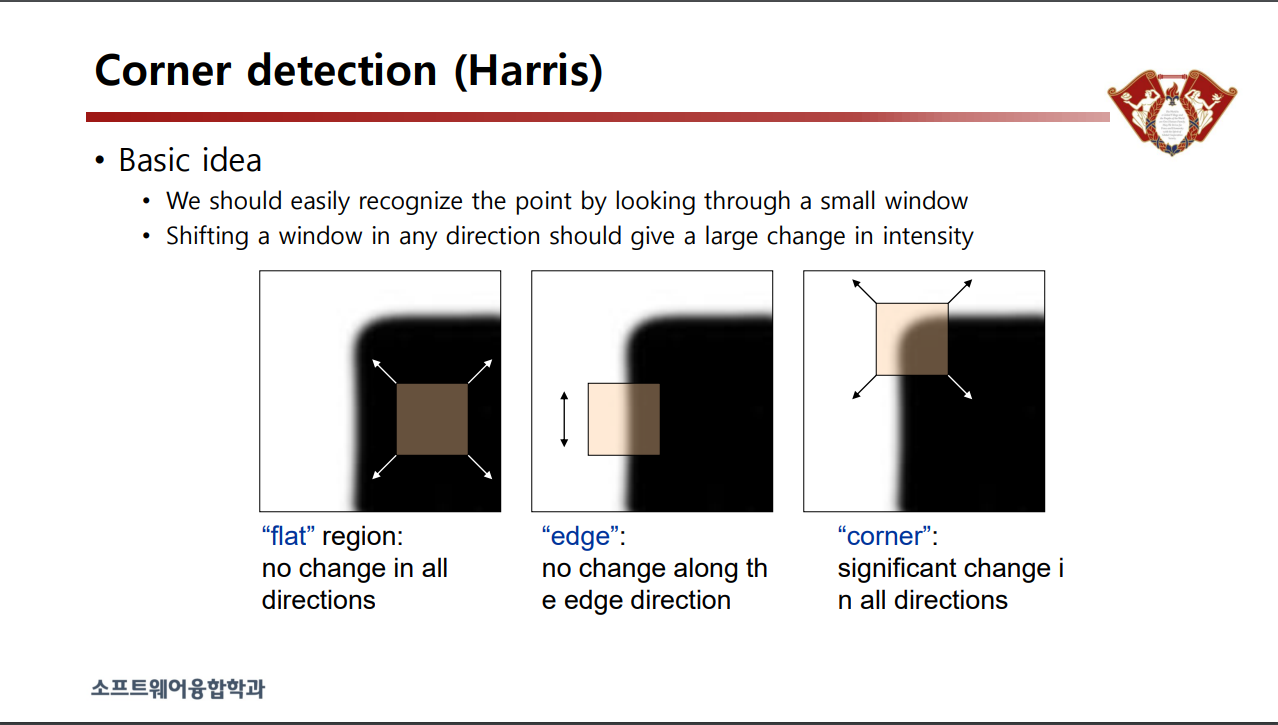
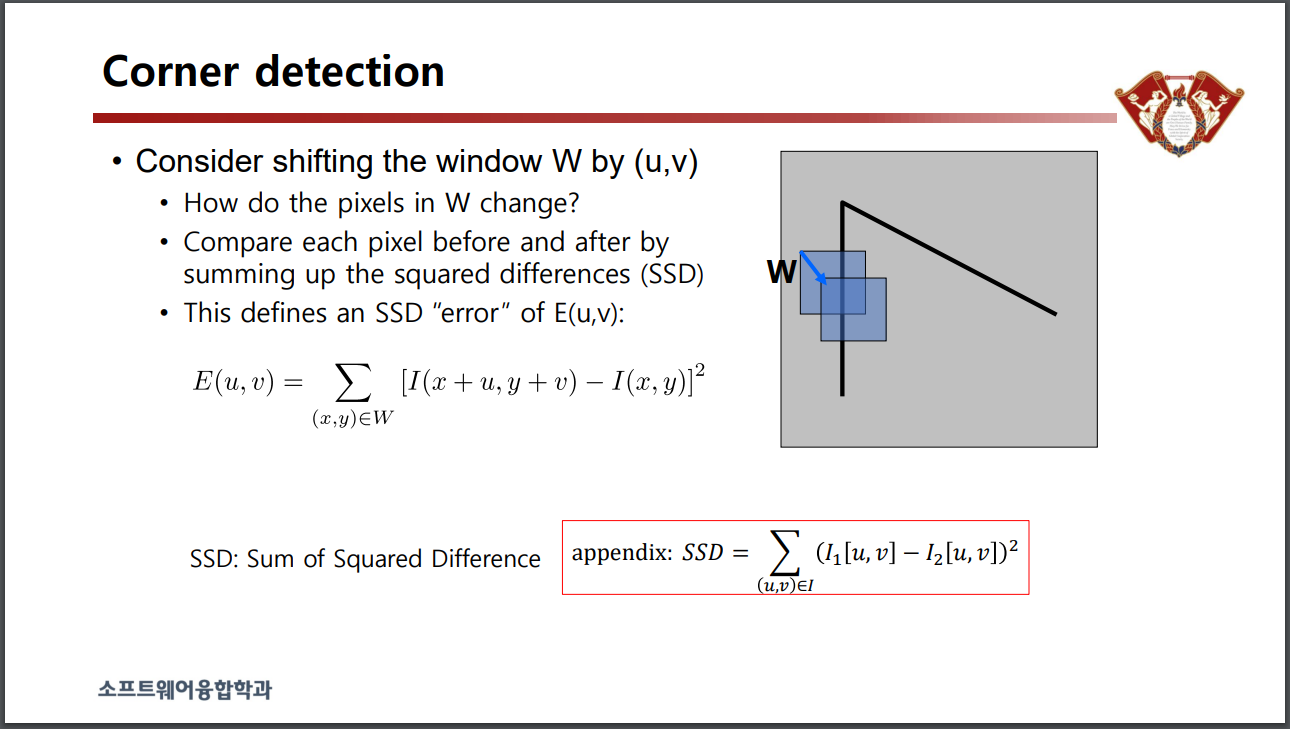
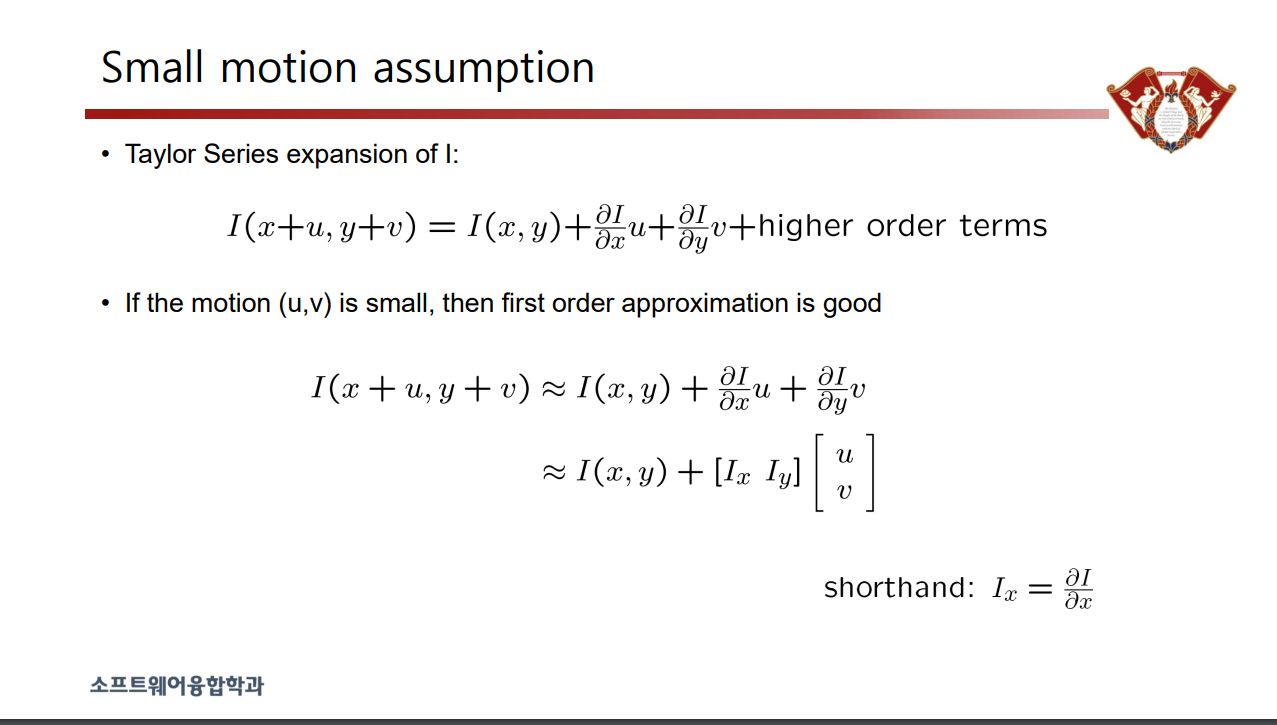
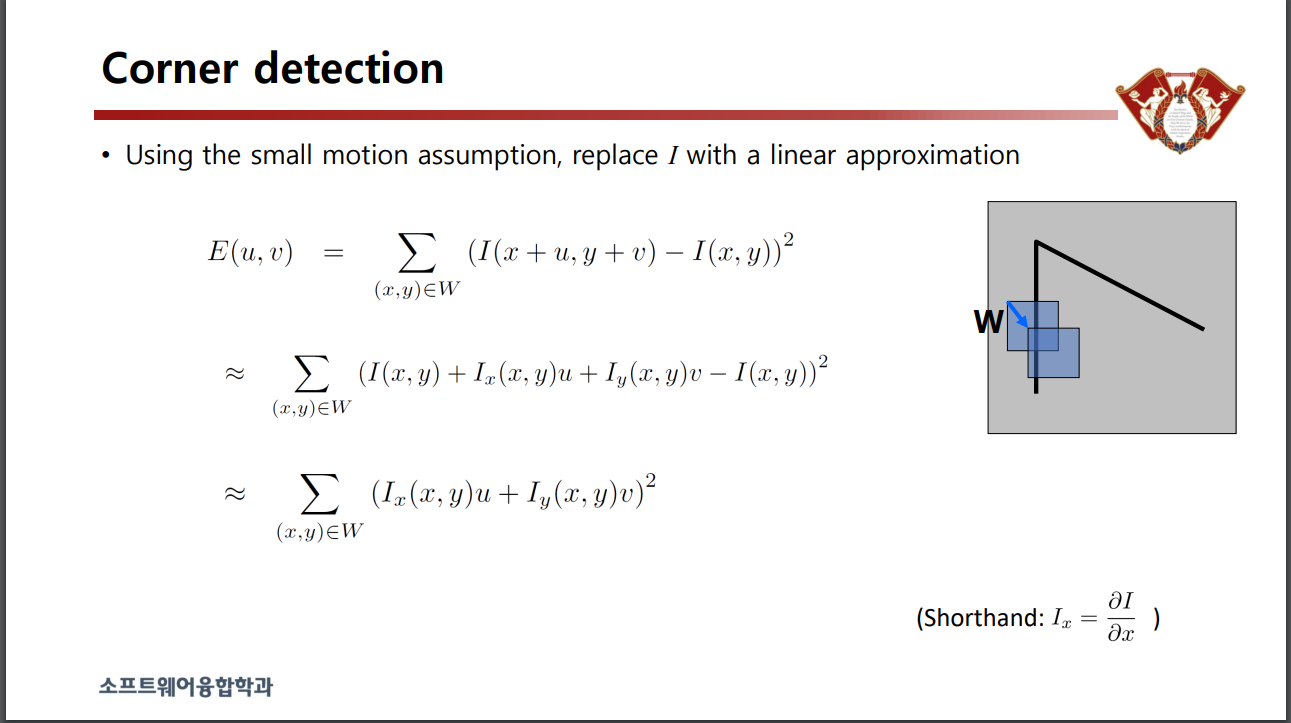
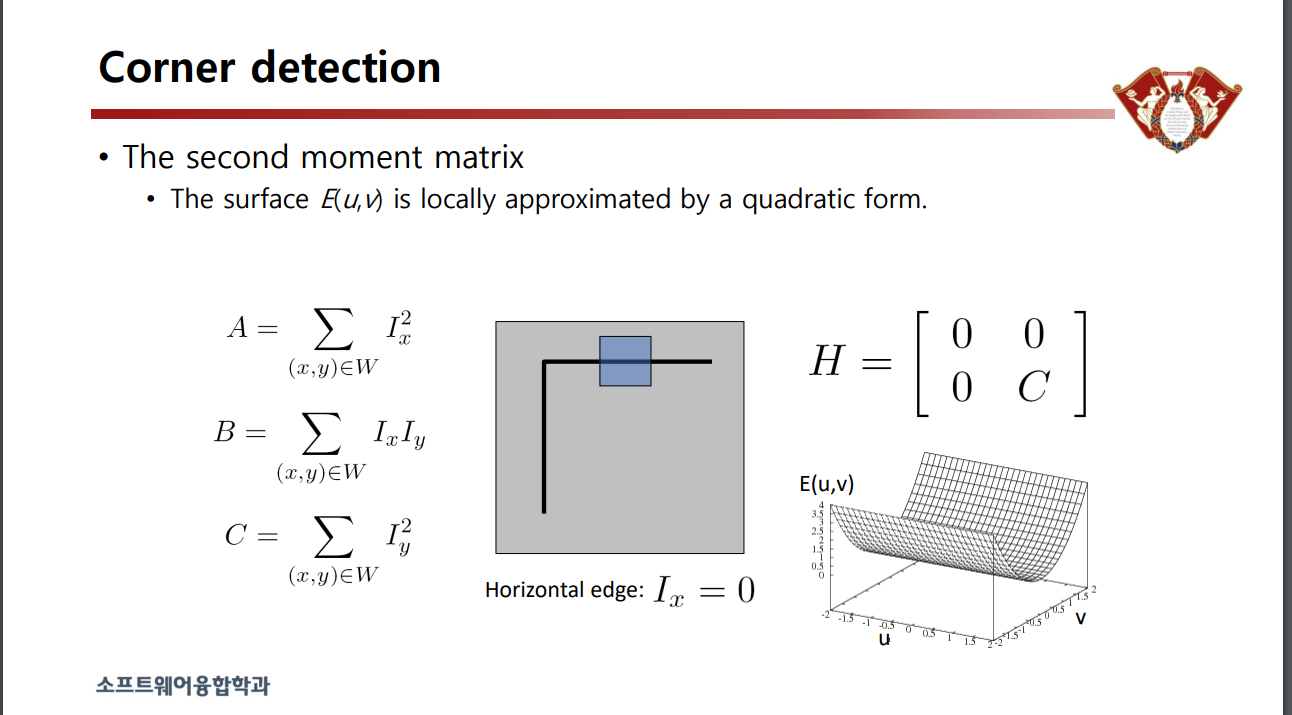
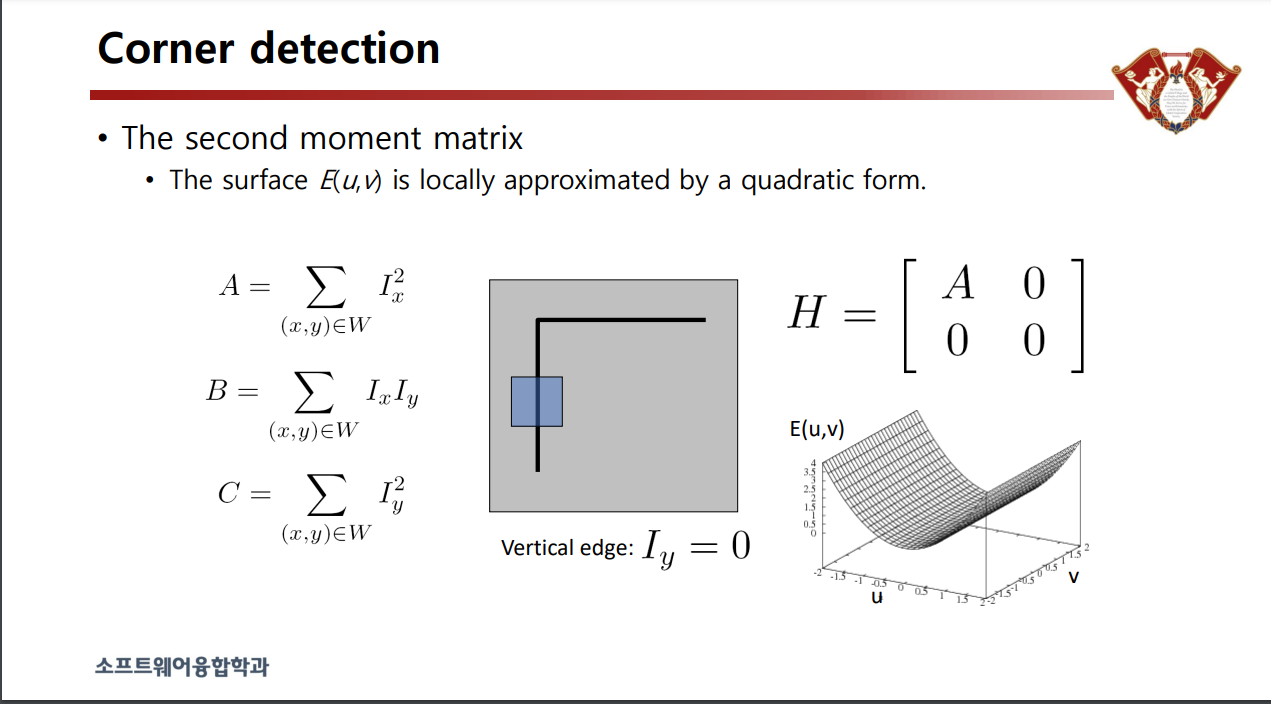
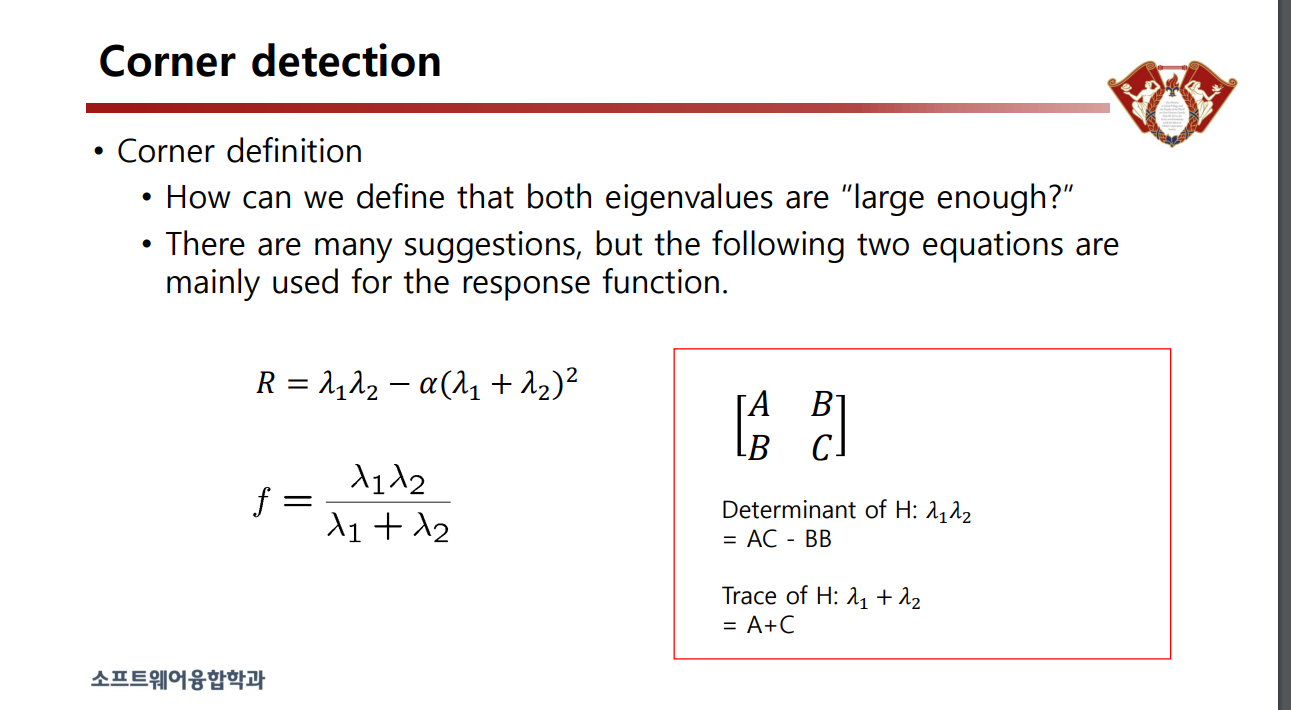
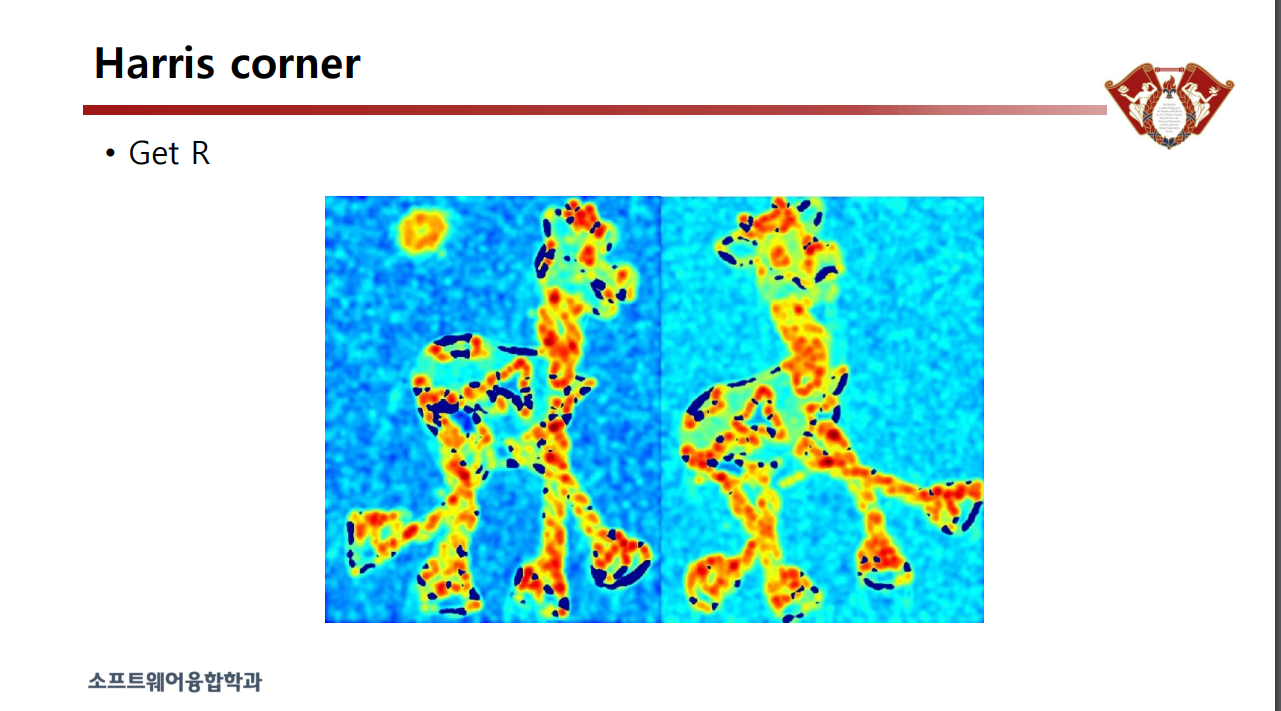
코너 감지
-모든 방향에서 명확한 차이 발생
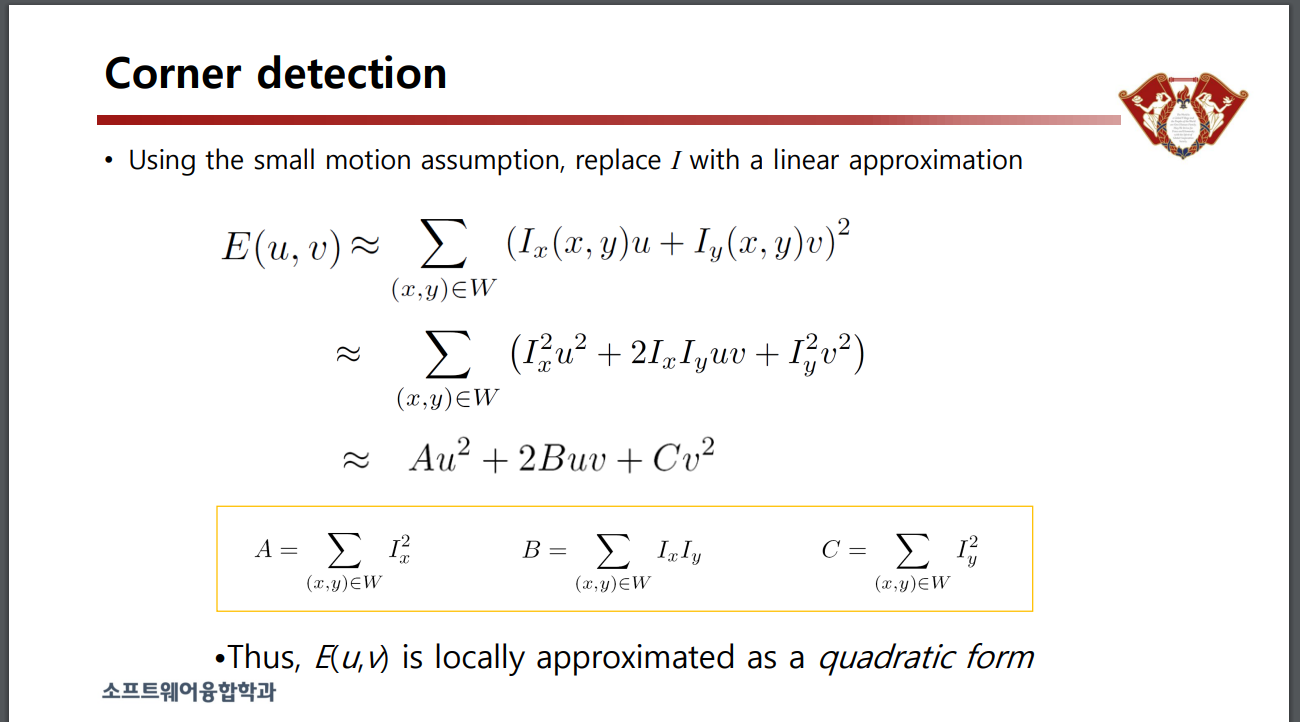
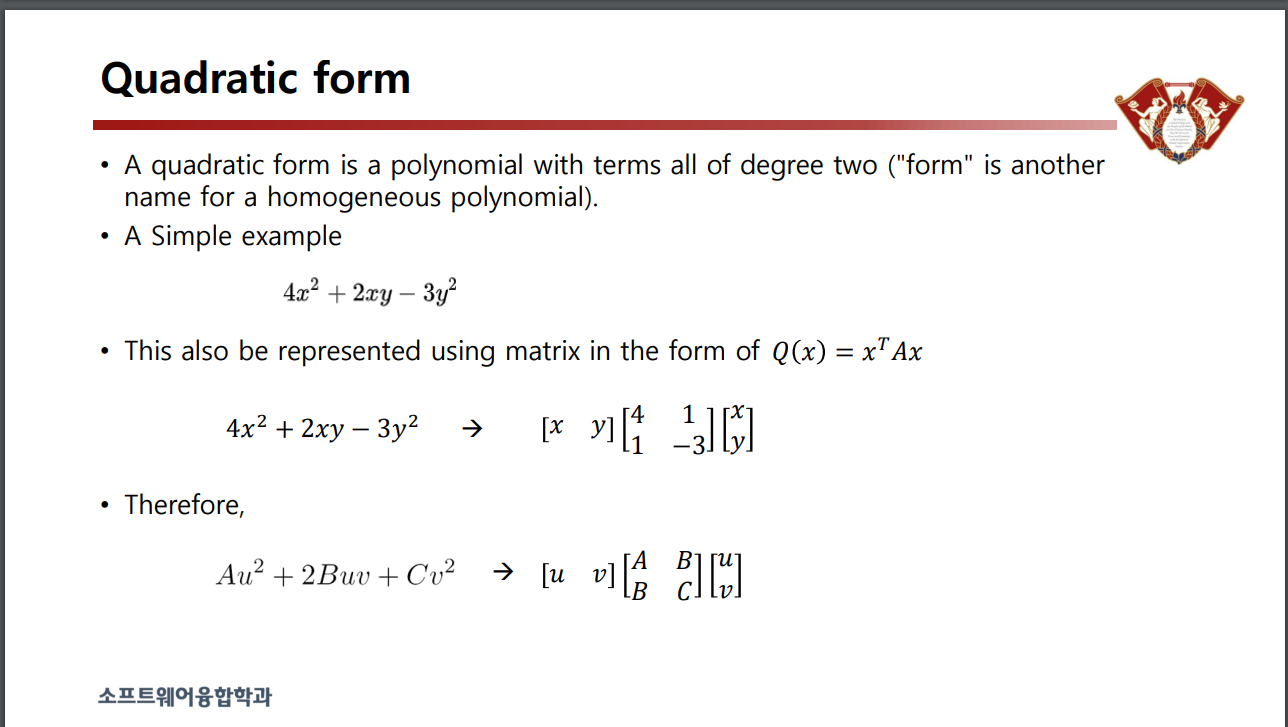
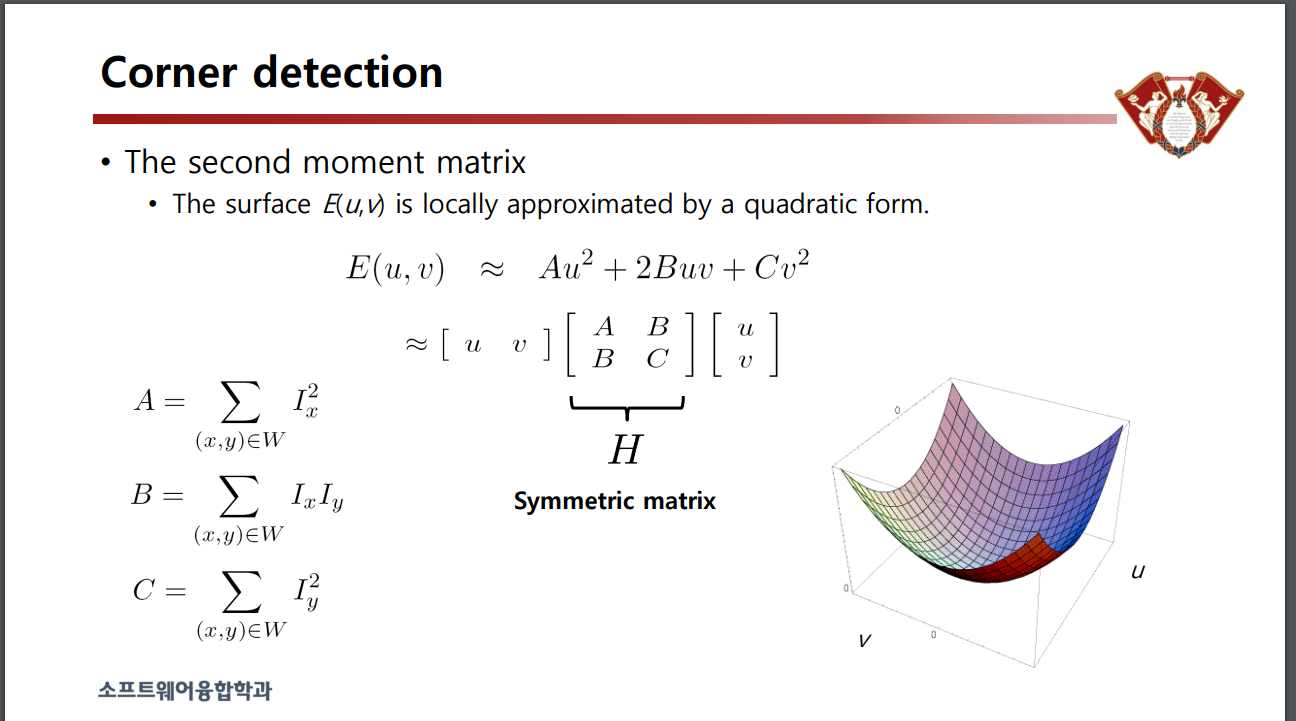
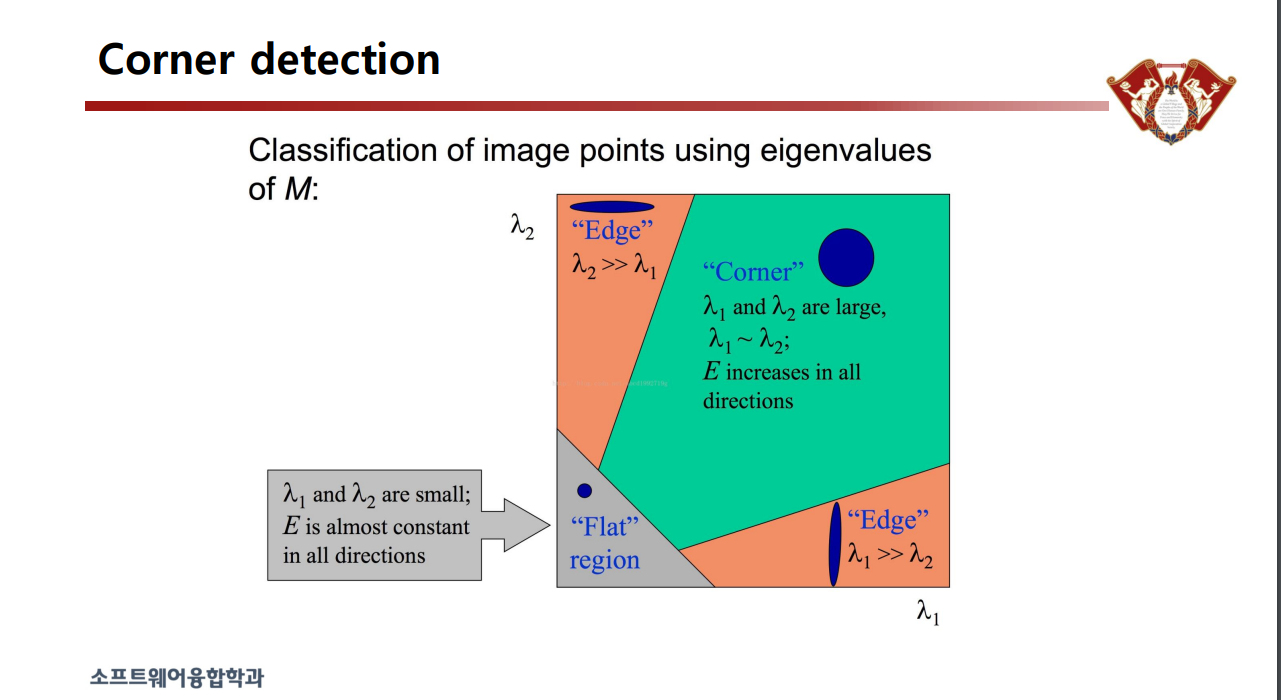
곱이 증가, 합이 감소 : 두 방향
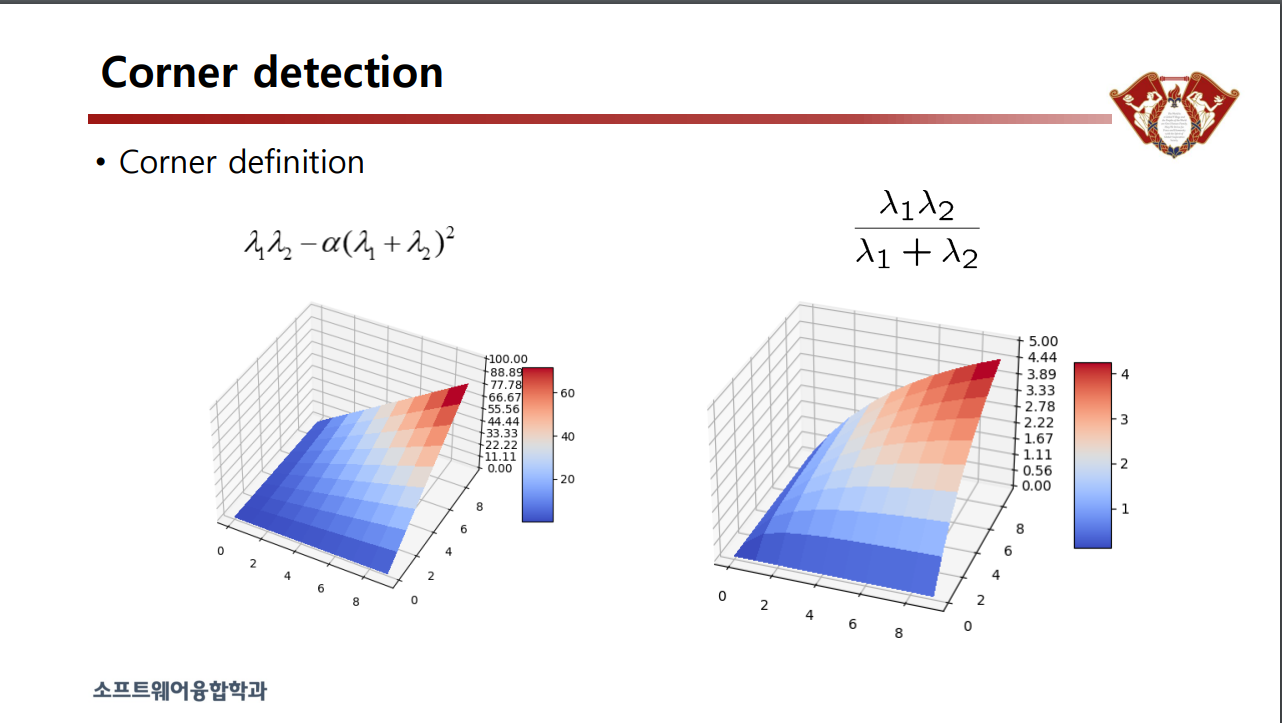
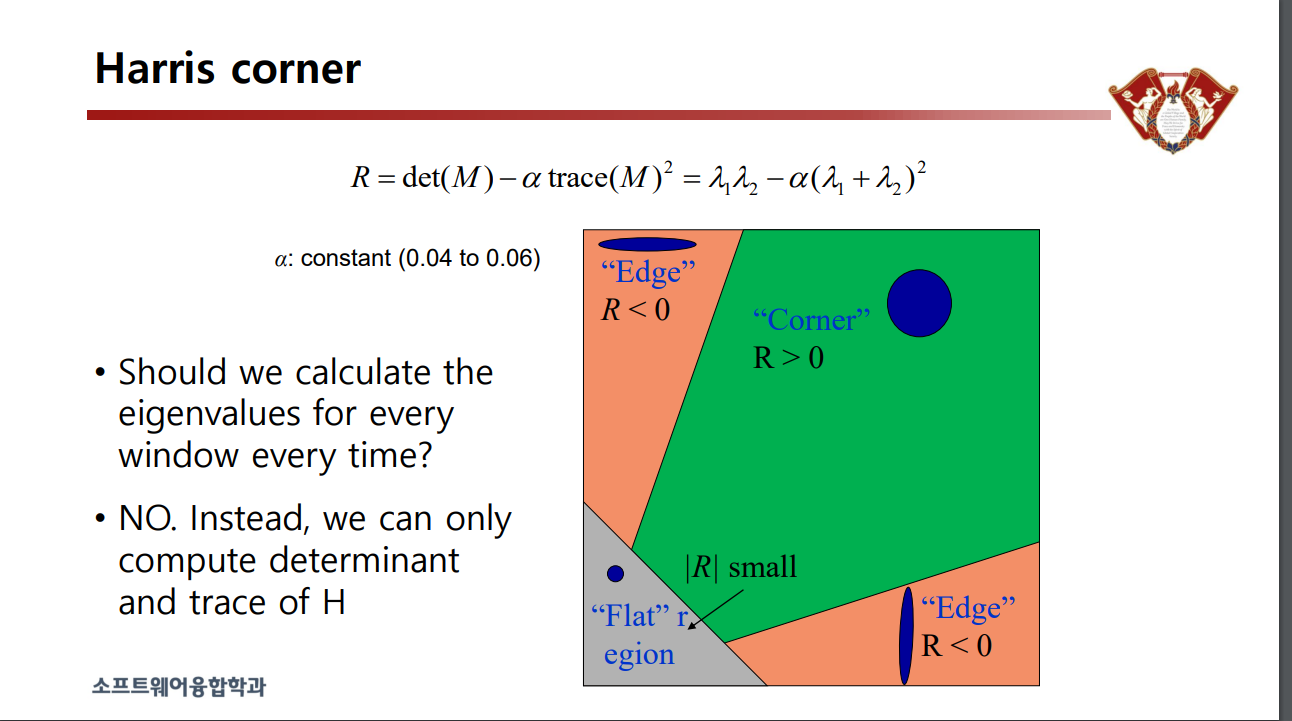
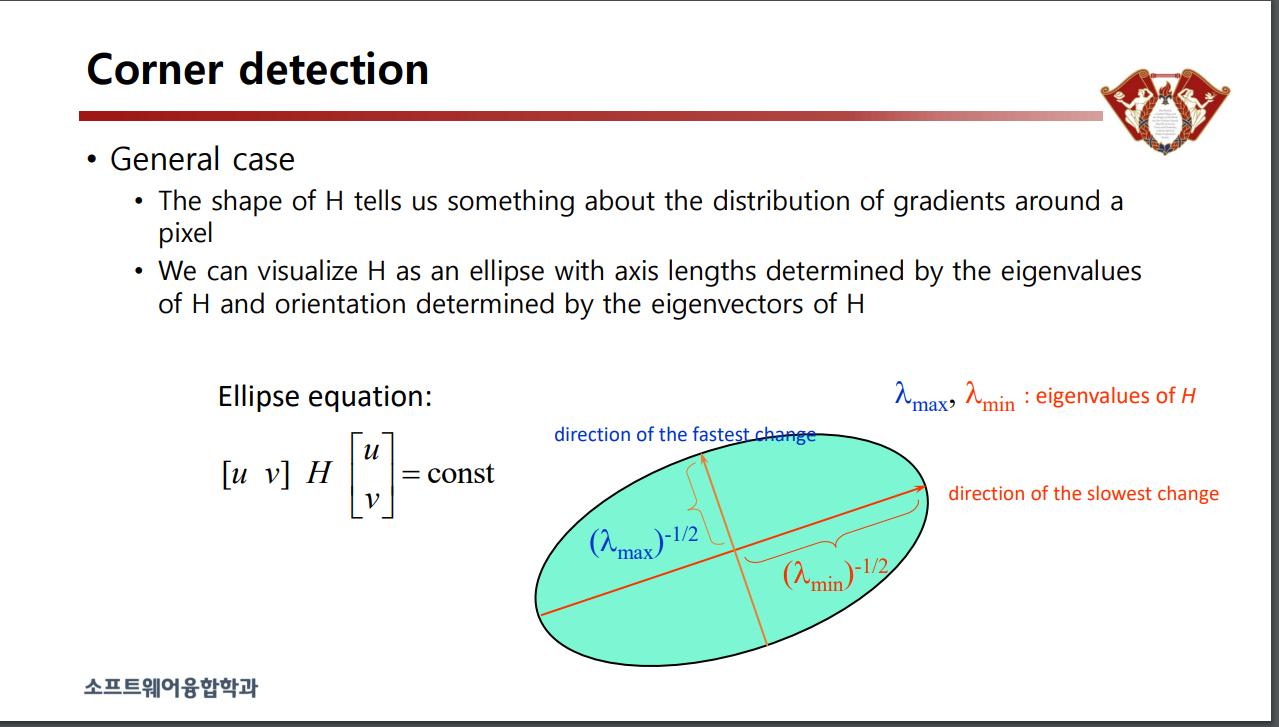
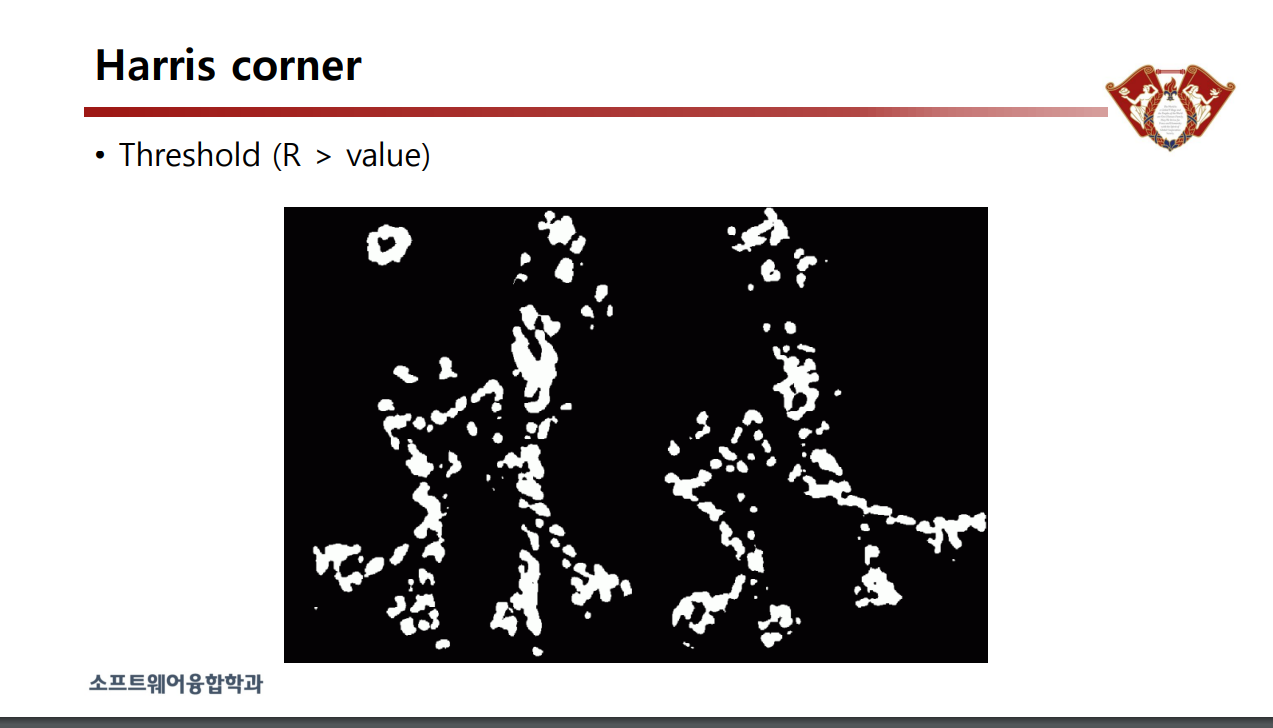
해리스코너
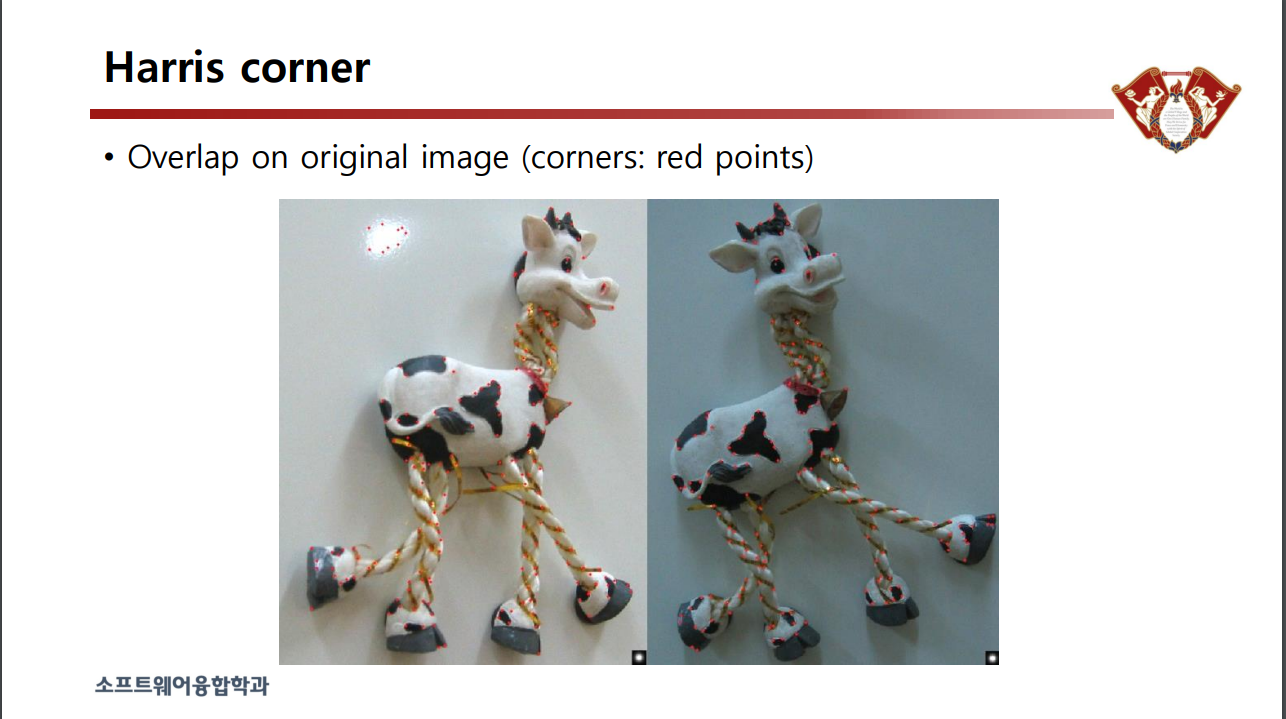
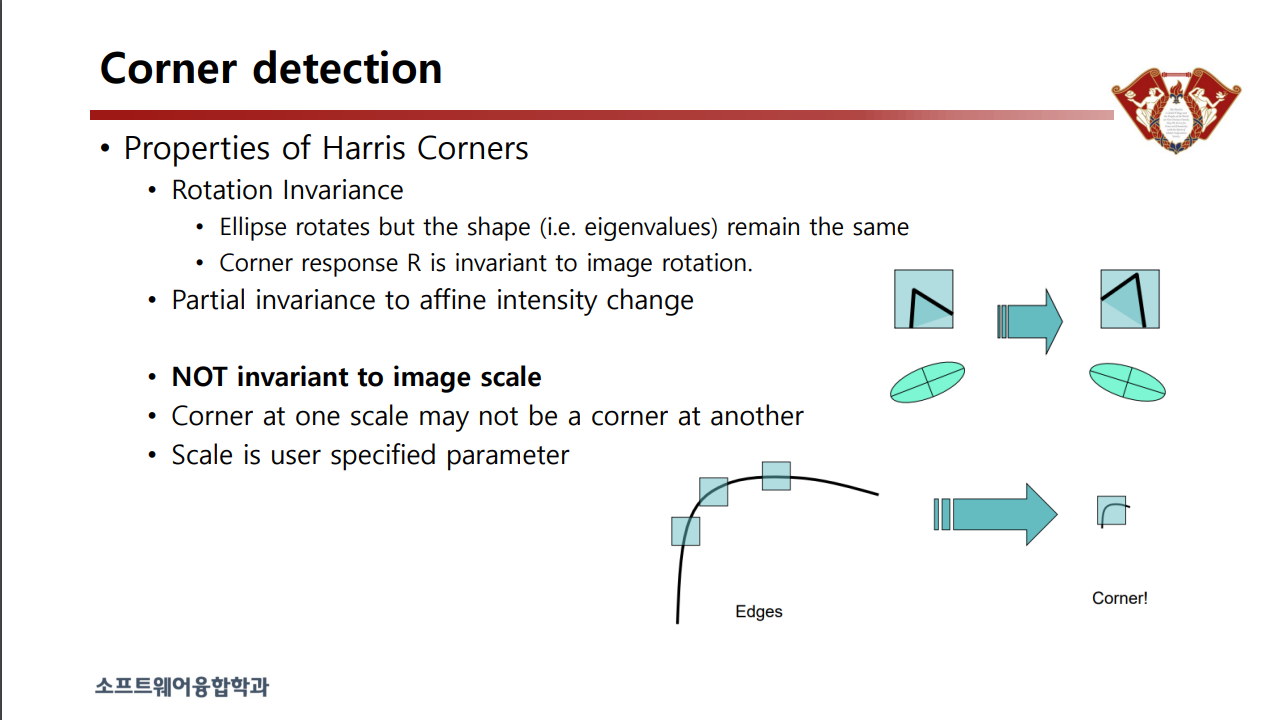
해리스코너의 특징
Rotation invariance : 회전에 상관 없음
affine : 모양이 조금 달라져도 추출 가능
NOT invariant to image scale : 크기 변화를 따라가지 못함
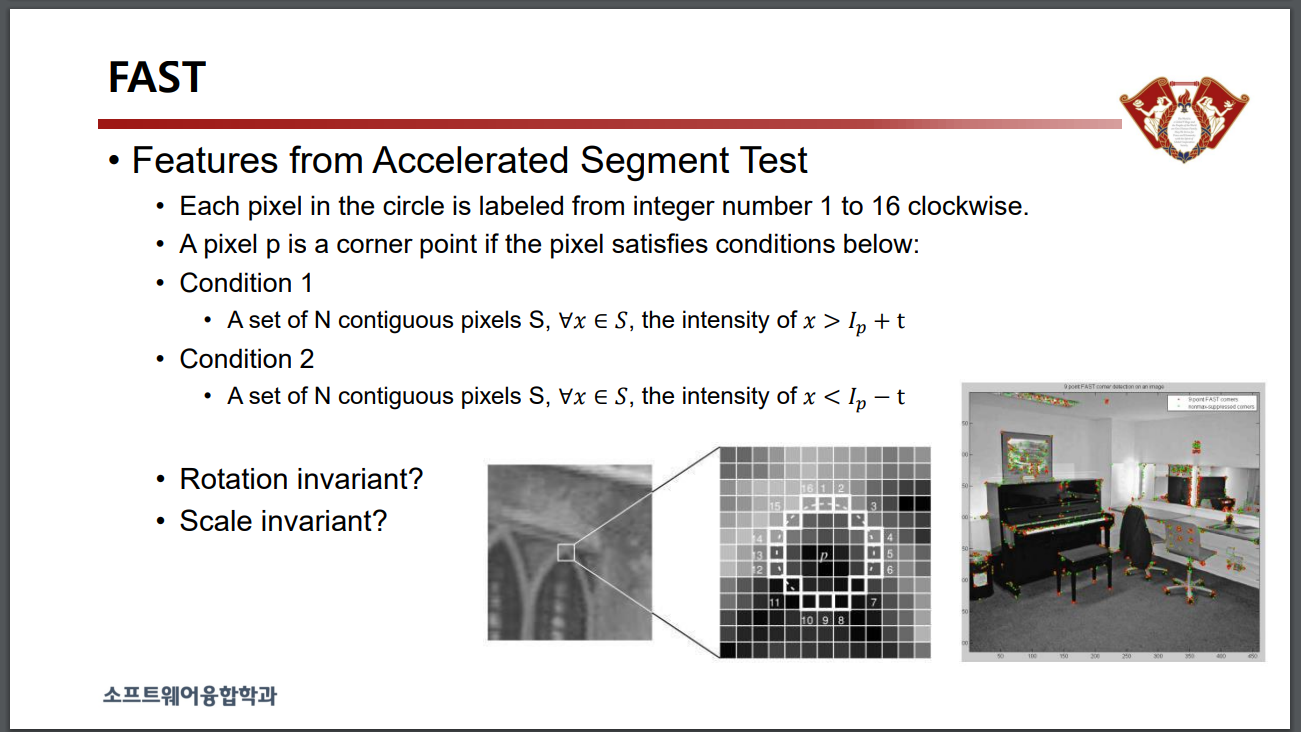
FAST : Features from Accelearated Segment Test
ex) Bresenham circle of radius 3
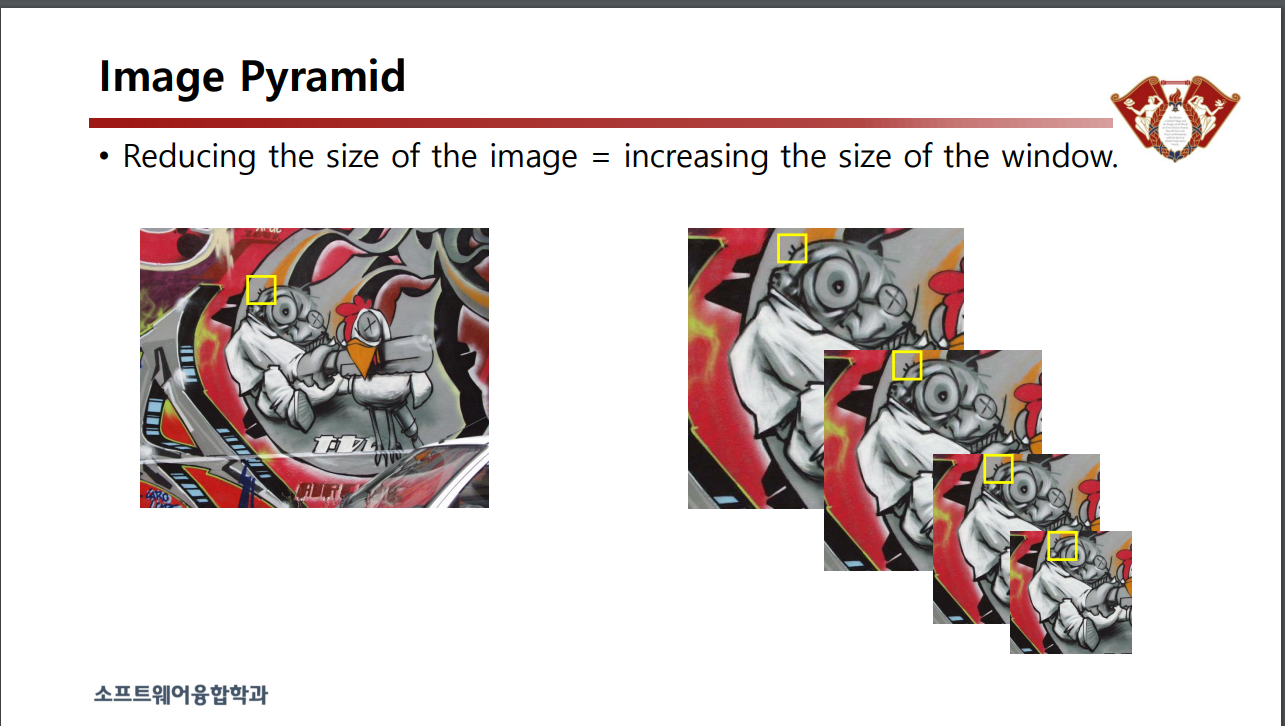
이미지 크기 감소

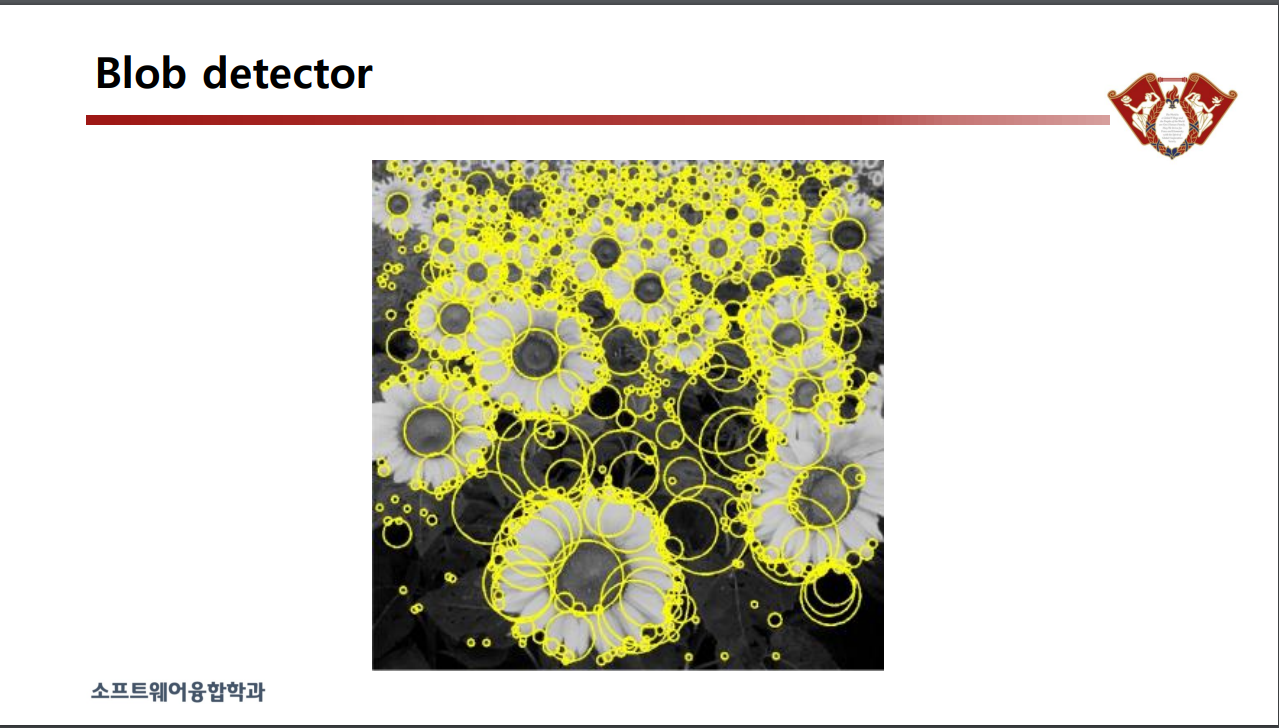
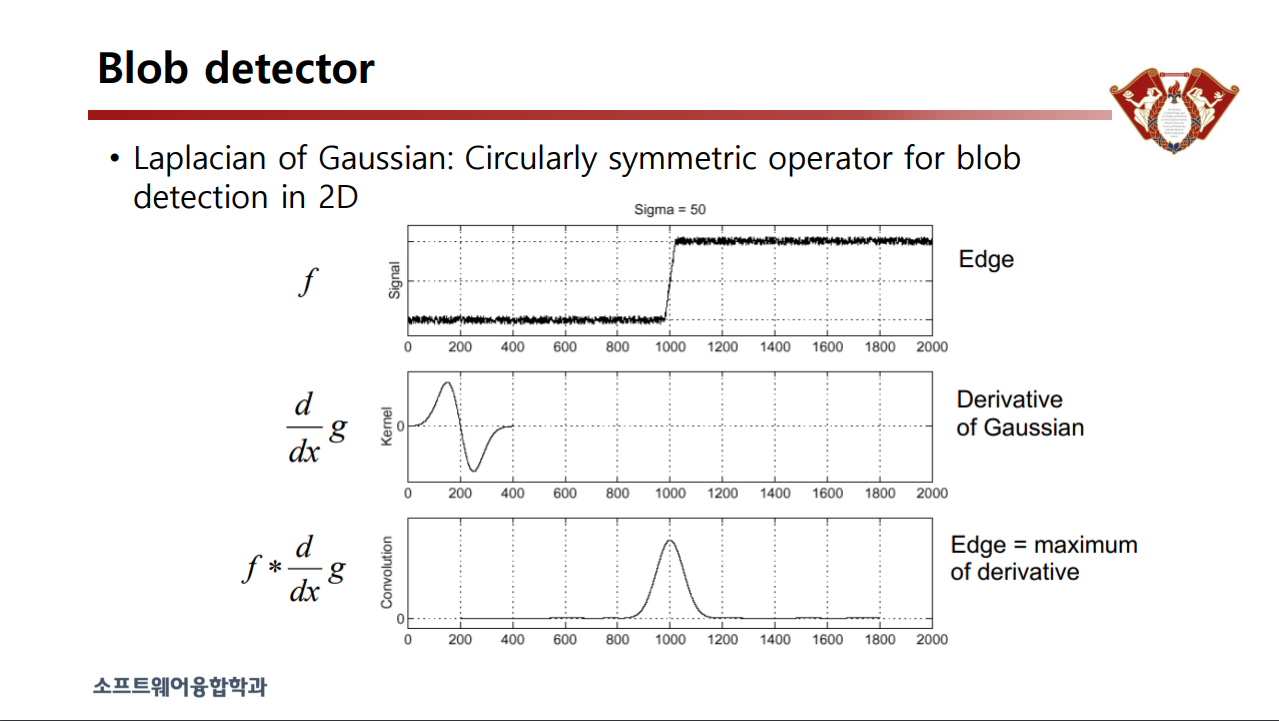
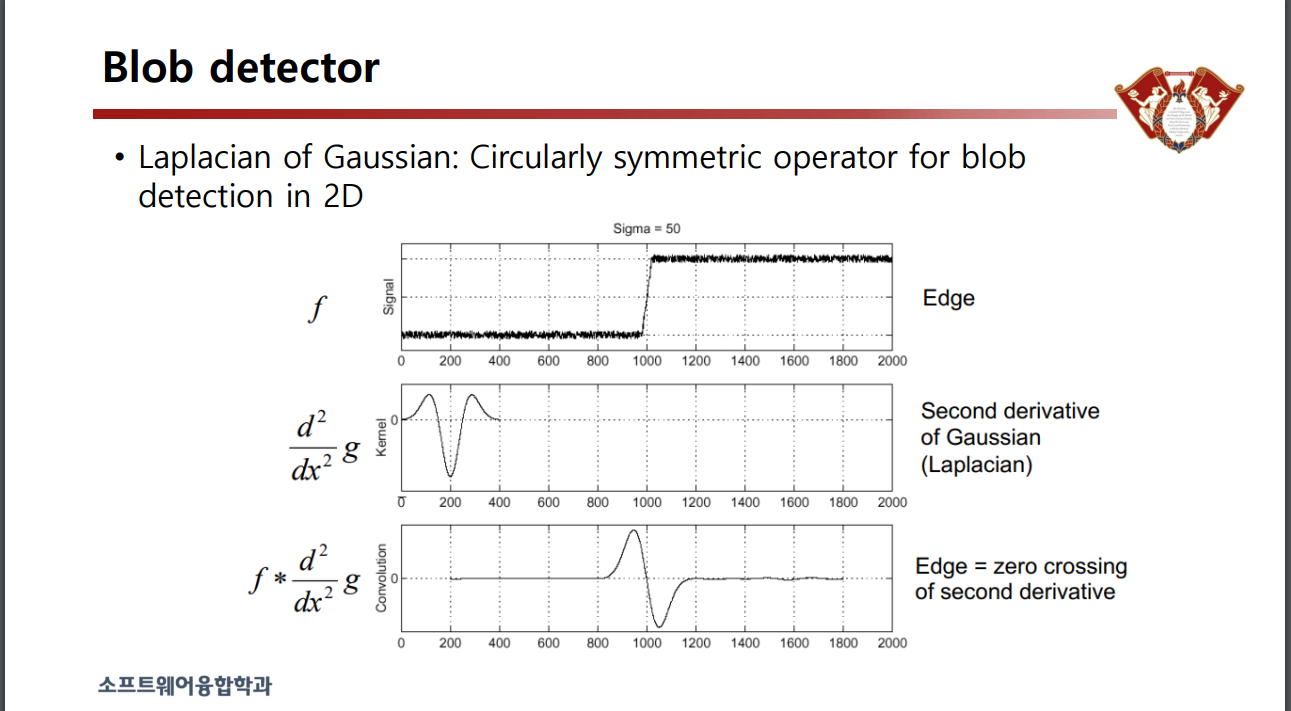
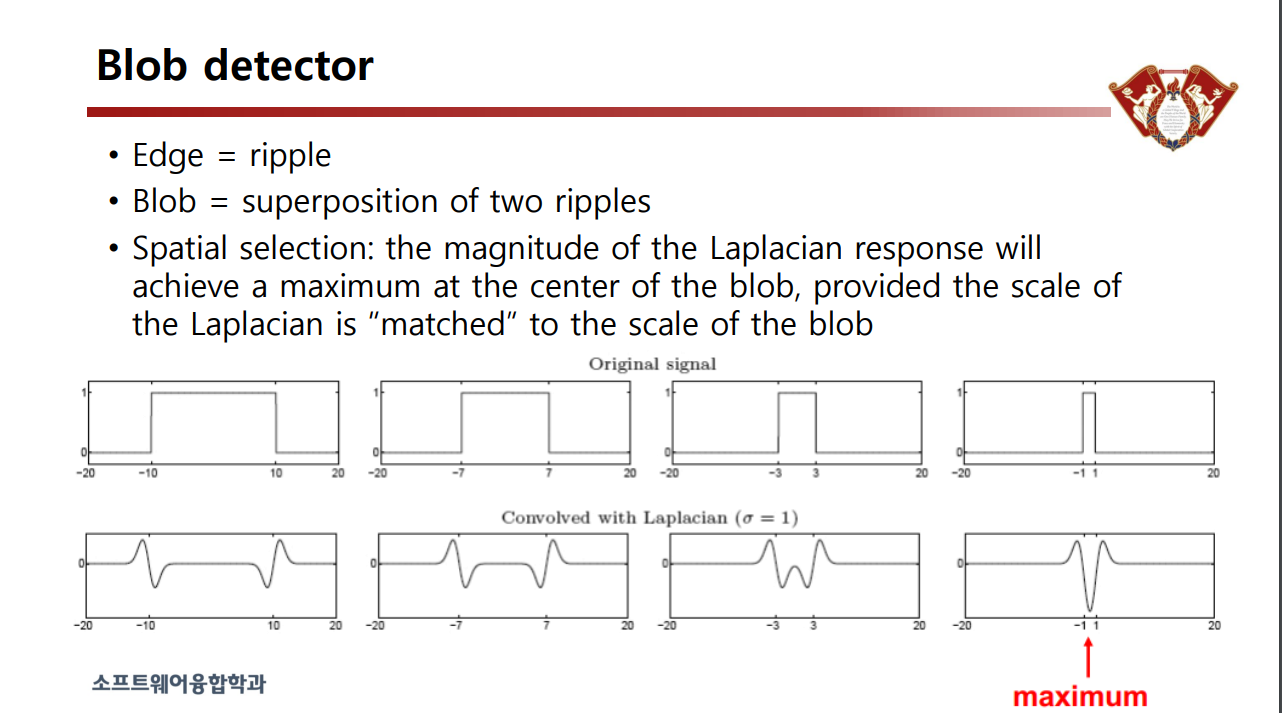
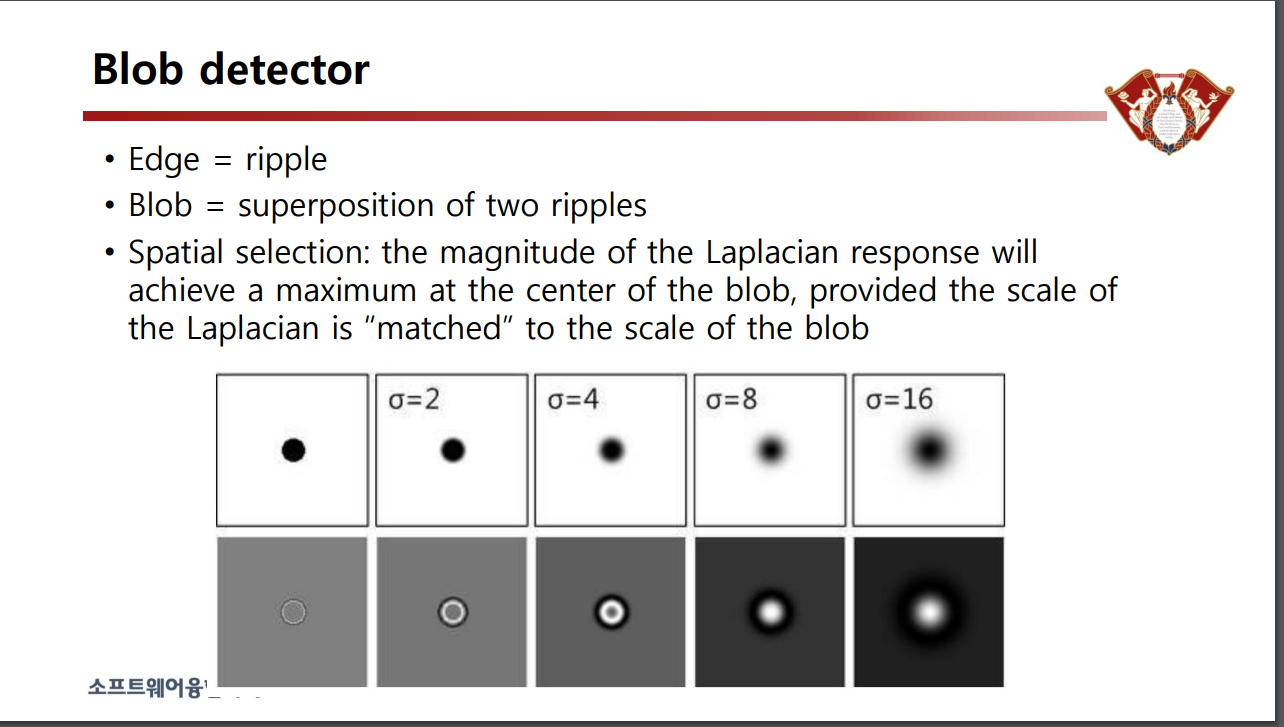
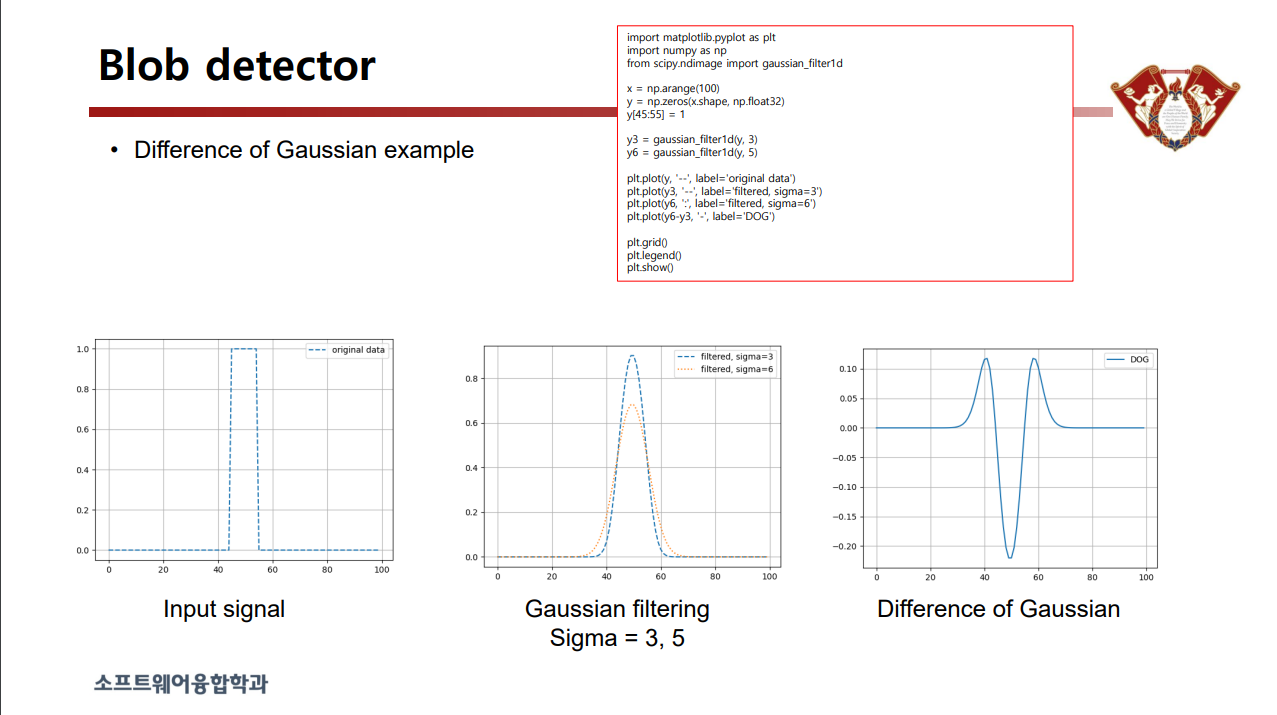
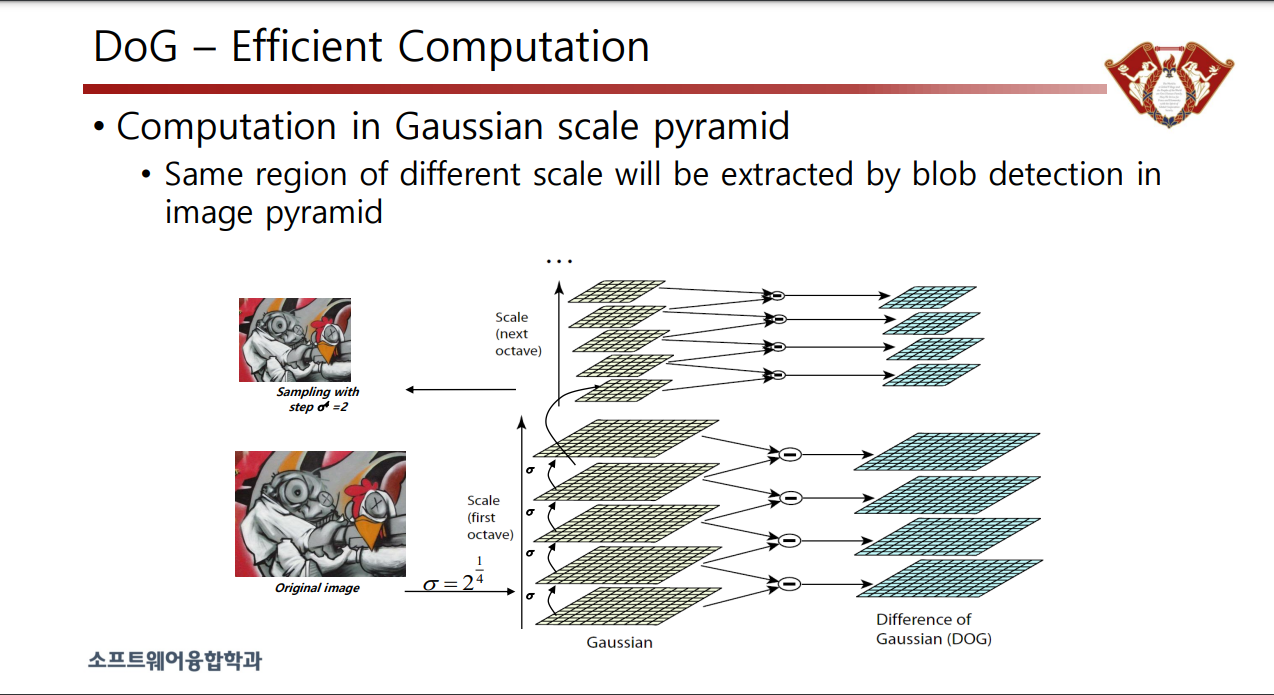
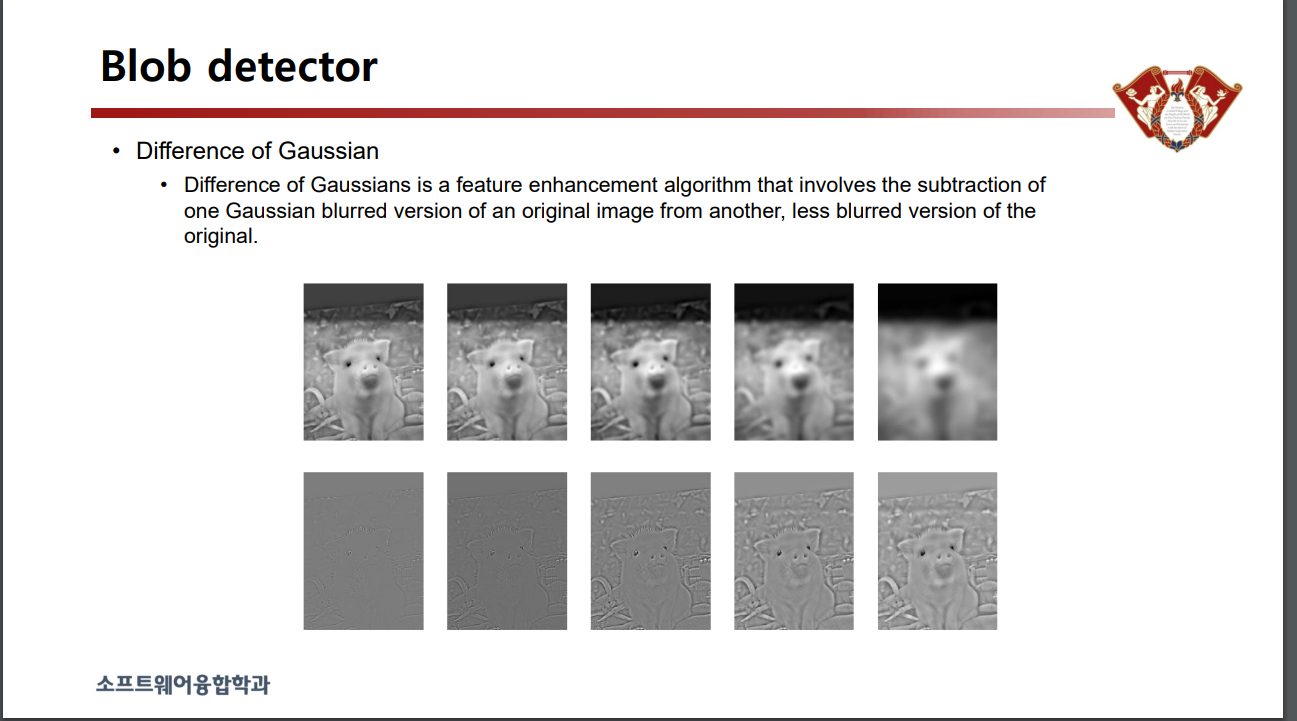
Blob : 튀어나온 것
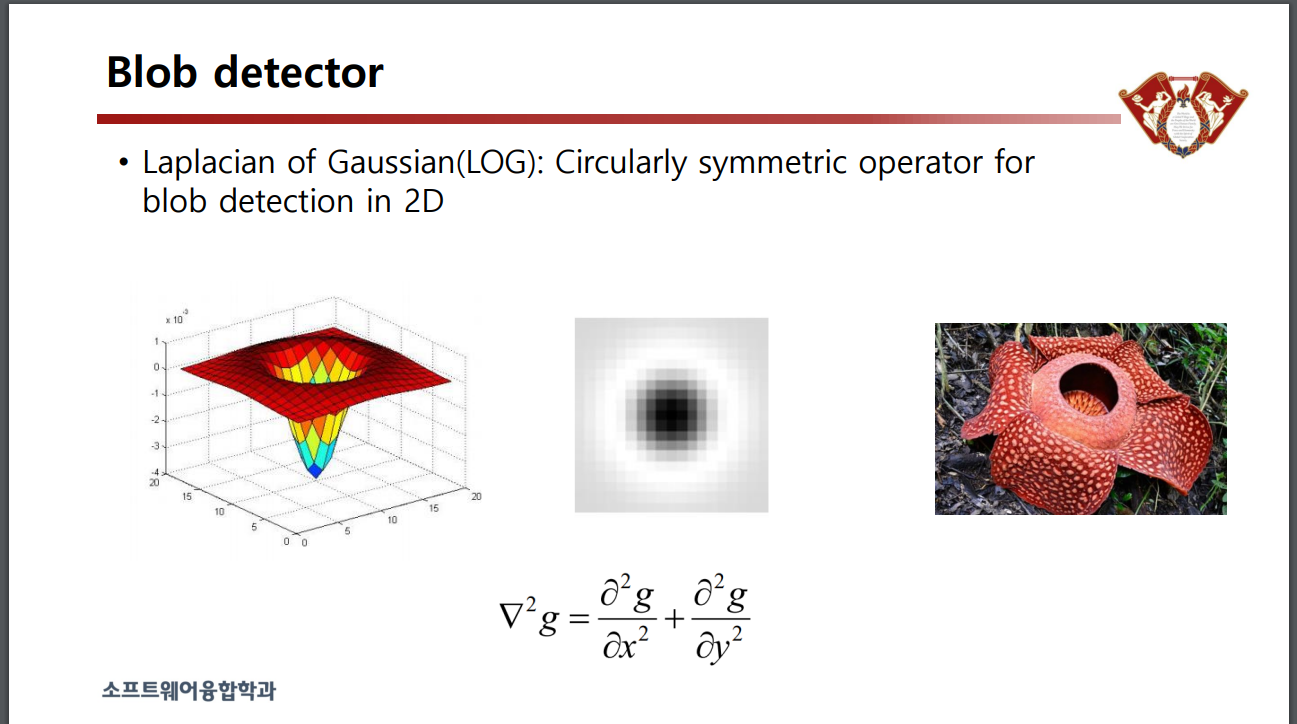
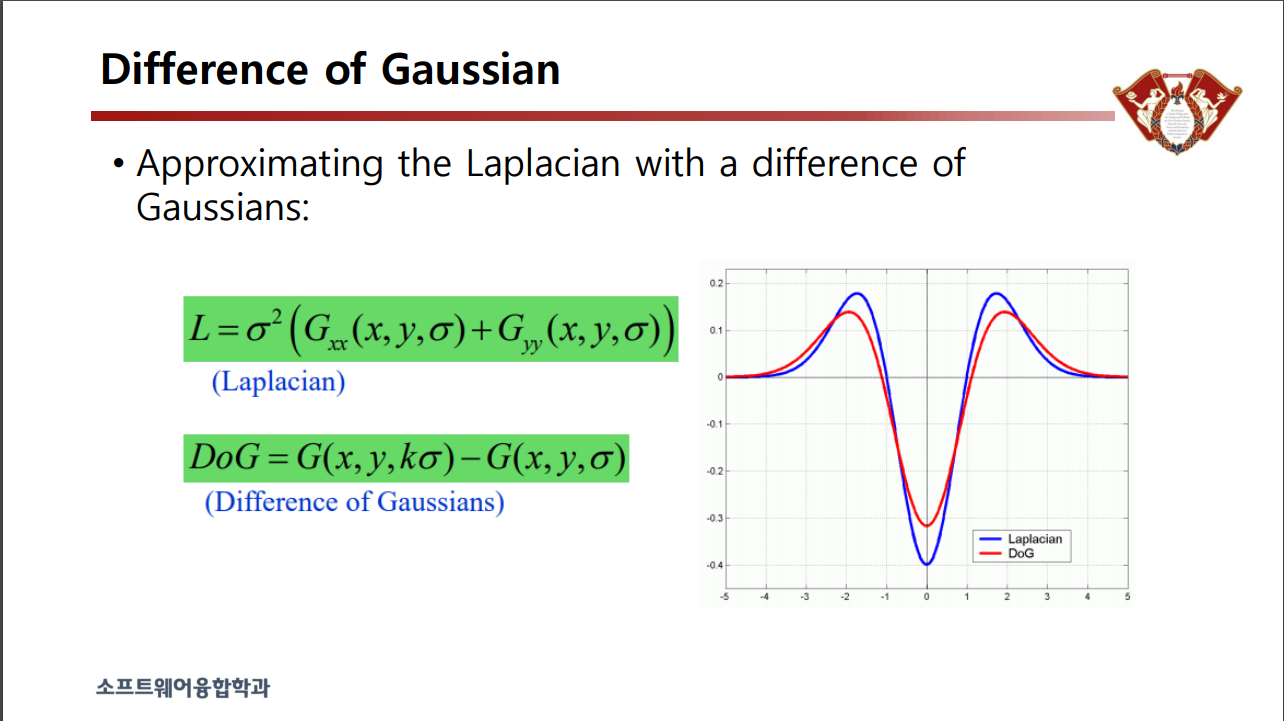
가우시안 함수 2번 미분

Engineering