
프로그래머 340211번 충돌위험 찾기 Java
https://school.programmers.co.kr/learn/courses/30/lessons/340211
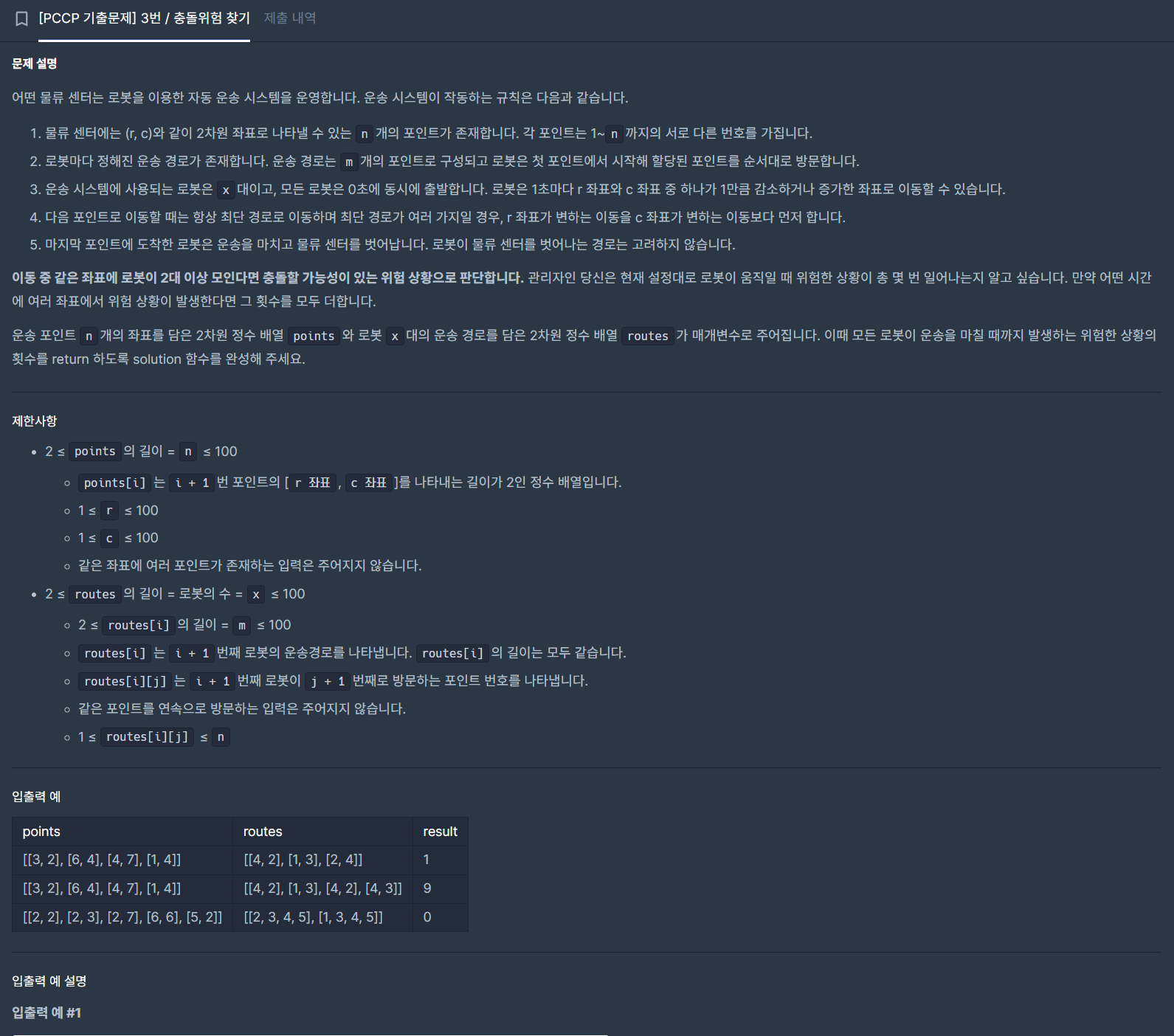
문제
생각하기
-
구현 문제이다.
-
로봇별 이동 경로를 시간 별로 기록해서 같은 시간, 같은 좌표에 있는 로봇들의 개수를 세면 된다.
동작
방향을 탐색할 때 BFS에서 하던 방식과 달랐다.
private static List<Coordinate> makePath(Coordinate start, Coordinate end) {
List<Coordinate> path = new ArrayList<>();
int x = start.x;
int y = start.y;
// 경로 만들기
while (x != end.x) {
if (x < end.x) x++;
else x--;
path.add(new Coordinate(x, y));
}
while (y != end.y) {
if (y < end.y) y++;
else y--;
path.add(new Coordinate(x, y));
}
return path;
} // End of makePath()
어차피 상 하 좌 우 로 밖에 못 움직이면, 출발 장소와 도착 장소의 x값 차이를 기반으로 x먼저 움직이고, y를 움직이면 된다는 방식을 왜 생각하지 못했을까
결과
코드
Java
import java.util.*;
class Solution {
private static class Coordinate {
int x;
int y;
private Coordinate(int x, int y) {
this.x = x;
this.y = y;
}
@Override
public boolean equals(Object o) {
if (this == o) return true;
if (o == null || getClass() != o.getClass()) return false;
Coordinate coordinate = (Coordinate) o;
return x == coordinate.x && y == coordinate.y;
}
@Override
public int hashCode() {
return Objects.hash(x, y);
}
@Override
public String toString() {
return "Coordinate{" + "x=" + x + ", y=" + y + '}';
}
} // End of Coordinate class
public int solution(int[][] points, int[][] routes) {
int ans = 0;
Map<Integer, Coordinate> coordinateMap = new HashMap<>();
int pointsLen = points.length;
for (int i = 0; i < pointsLen; i++) {
coordinateMap.put(i + 1, new Coordinate(points[i][0], points[i][1]));
}
List<List<Coordinate>> robotPaths = new ArrayList<>();
for (int[] t : routes) {
List<Coordinate> paths = new ArrayList<>();
Coordinate start = coordinateMap.get(t[0]);
paths.add(start);
int tLen = t.length;
for (int i = 1; i < tLen; i++) {
Coordinate next = coordinateMap.get(t[i]);
paths.addAll(makePath(start, next));
start = next;
}
robotPaths.add(paths);
}
int maxTime = 0;
for (List<Coordinate> paths : robotPaths) {
maxTime = Math.max(maxTime, paths.size());
}
for (int i = 0; i < maxTime; i++) {
Map<Coordinate, Integer> coordinateCount = new HashMap<>();
for (List<Coordinate> path : robotPaths) {
if (i < path.size()) {
Coordinate coord = path.get(i);
coordinateCount.put(coord, coordinateCount.getOrDefault(coord, 0) + 1);
}
}
for (int count : coordinateCount.values()) {
if (count > 1) {
ans++;
}
}
}
return ans;
} // End of solution()
private static List<Coordinate> makePath(Coordinate start, Coordinate end) {
List<Coordinate> path = new ArrayList<>();
int x = start.x;
int y = start.y;
// 경로 만들기
while (x != end.x) {
if (x < end.x) x++;
else x--;
path.add(new Coordinate(x, y));
}
while (y != end.y) {
if (y < end.y) y++;
else y--;
path.add(new Coordinate(x, y));
}
return path;
} // End of makePath()
} // End of Solution classKotlin
import java.util.*
class Solution {
private data class Coordinate(val x: Int, val y: Int)
fun solution(points: Array<IntArray>, routes: Array<IntArray>): Int {
var ans = 0
val coordinateMap = HashMap<Int, Coordinate>()
val pointsLen = points.size
for (i in 0 until pointsLen) {
coordinateMap[i + 1] = Coordinate(points[i][0], points[i][1])
}
val robotPaths: MutableList<MutableList<Coordinate>> = mutableListOf()
for (t in routes) {
val paths: MutableList<Coordinate> = mutableListOf()
var start = coordinateMap[t[0]]
paths.add(start!!)
val tLen = t.size
for (i in 1 until tLen) {
val next = coordinateMap[t[i]]
paths.addAll(makePath(start!!, next!!))
start = next
}
robotPaths.add(paths)
}
var maxTime = 0
robotPaths.forEach {
maxTime = Math.max(maxTime, it.size)
}
for (i in 0 until maxTime) {
val coordinateCount = HashMap<Coordinate, Int>()
for (path in robotPaths) {
if (i < path.size) {
val coor = path[i]
coordinateCount.put(coor, coordinateCount.getOrDefault(coor, 0) + 1)
}
}
for (count in coordinateCount.values) {
if (count > 1) ans++
}
}
return ans
} // End of solution()
private fun makePath(start: Coordinate, end: Coordinate): MutableList<Coordinate> {
val path: MutableList<Coordinate> = mutableListOf()
var x = start.x
var y = start.y
while (x != end.x) {
if (x < end.x) x++
else x--
path.add(Coordinate(x, y))
}
while (y != end.y) {
if (y < end.y) y++
else y--
path.add(Coordinate(x, y))
}
return path
} // End of makePath()
} // End of Solution class