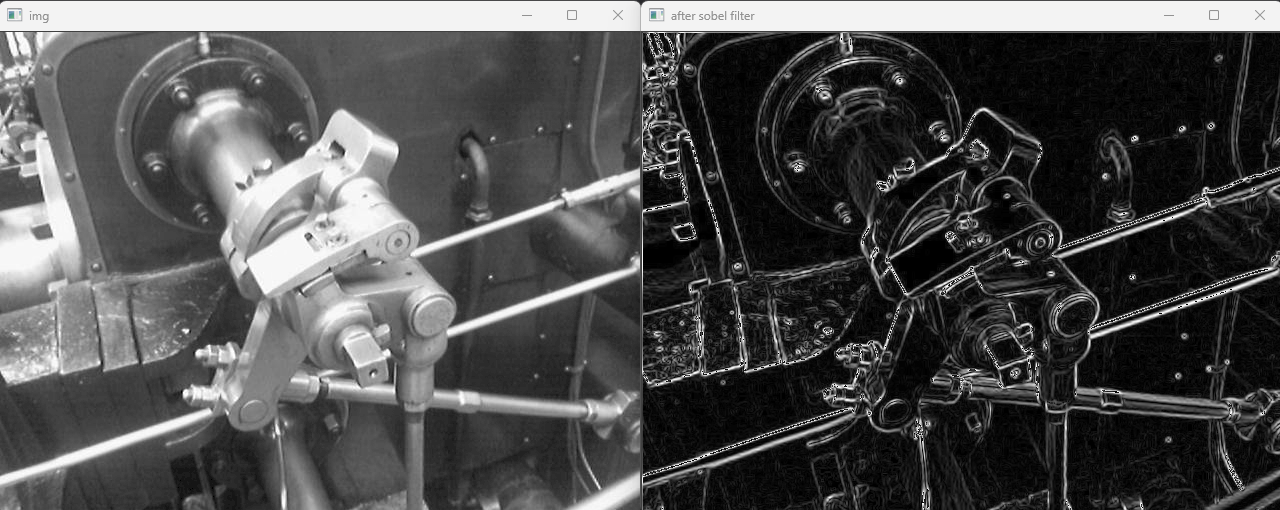
👀 Sobel Filter
대표적인 Edge 검출 필터로,
일반적으로 가로방향과 세로방향에 대한 edge 검출을 각각 수행한 뒤, 절대값의 합의 평균으로 합성하여 최종 edge 값을 구한다.
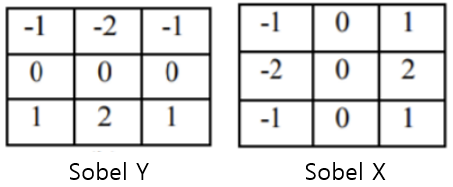
이때 두 마스크의 합이 0이 되도록 하면, 1로 정규화하는 과정은 필요 없다.
위 이미지에서 알 수 있듯이 3 x 3 mask에서는 행마다 3가지의 값이 있고, 이는 이전값, 중간값, 다음값으로 중간값을 기준으로 이전값 ≤ 중간값 ≤ 다음값을 만족하는 것을 볼 수 있다.
💻 Sobel Filter 사용
🔑 함수 사용
간단히 openCV를 통해 사용할 수 있는 Sobel 함수가 있다.
void cv::Sobel(
InputArray src,
OutputArray dst,
int ddepth,
int dx,
int dy,
int ksize = 3,
double scale = 1,
double delta = 0,
int borderType = BORDER_DEFAULT)이를 사용한 예제는 다음과 같다.
Mat SobelFilter(Mat img) {
Mat dstImg(img.size(), CV_8UC1);
Mat sobelX, sobelY; // x방향과 y방향 mask를 각각 준비
Sobel(img, sobelX, CV_8UC1, 1, 0); // 가로방향 sobel
Sobel(img, sobelY, CV_8UC1, 0, 1); // 세로방향 sobel
dstImg = (abs(sobelX) + abs(sobelY)) / 2; // 절대값 합의 평균
return dstImg;
}
🔑 구현하여 사용
검색을 아무리 해도 위 Sobel 함수로 원하는 대각을 설정하는 예제를 찾지 못했다.
그래서 직접 구현하는 방법을 사용했다.
45도와 135도 대각 edge를 검출하는 Sobel Filter 구현
Mat mySobelFilter(Mat img) { int kernelX[3][3] = { -2, -1, 0, -1, 0, 1, 0, 1, 2 }; // 가로방향 45도 sobel 마스크 int kernelY[3][3] = { 0, 1, 2, -1, 0, 1, -2, -1, 0 }; // 세로방향 135도 sobel 마스크 // mask 합이 0이 되므로 1로 정규화하는 과정 필요 x Mat dstImg(img.size(), CV_8UC1); uchar* srcData = img.data; uchar* dstData = dstImg.data; // 변수 지정 int width = img.cols; int height = img.rows; // Data array에 값 입력 for (int y = 0; y < height; y++) { for (int x = 0; x < width; x++) { dstData[y * width + x] = (abs(myKernelConv3x3(srcData, kernelX, x, y, width, height, 1)) + abs(myKernelConv3x3(srcData, kernelY, x, y, width, height, 1))) / 2; } } return dstImg; }
- 이때
img.data는 1차원 배열인 것을 주의해야 한다.

사용한 myKernelConv3x3 함수는 마스크에 대한 convolution 처리를 하는 함수이다.
int myKernelConv3x3(uchar* arr, int kernel[][3], int x, int y, int width, int height, int ch, int BGR = 0) {
int sum = 0;
int sumKernel = 0;
for (int j = -1; j <= 1; j++) {
for (int i = -1; i <= 1; i++) {
if ((y + j) >= 0 && (y + j) < height && (x + i) >= 0 && (x + i) < width) {
if (ch == 1) {
// 단일 채널이라면
sum += arr[(y + j) * width + (x + i)] * kernel[i + 1][j + 1];
}
else if (ch == 3) {
// 컬러 영상일 때
sum += arr[(y + j) * width * 3 + (x + i) * 3 + BGR] + kernel[i + 1][j + 1];
}
sumKernel += kernel[i + 1][j + 1];
}
}
}
if (sumKernel != 0) {
return sum / sumKernel; // 합이 1로 정규화되도록 하여 영상의 밝기 변화 방지
}
else return sum;
}즉, 다음 코드에서 myKernelConv3x3(srcData, kernelX_Y, x, y, width, height, 1)은 kernelX 혹은 kernelY에 각 픽셀 (x, y)에서의 edge값을 도출한 뒤 두개의 값을 더하여 평균을 구한 값을 data에 넣게 되는 것이다.
for (int y = 0; y < height; y++) {
for (int x = 0; x < width; x++) {
dstData[y * width + x] = (abs(myKernelConv3x3(srcData, kernelX, x, y, width, height, 1)) +
abs(myKernelConv3x3(srcData, kernelY, x, y, width, height, 1))) / 2;
}
}

코린이 성장 과정! 깊이 있게 파고들 공부를 탐색하고 있습니다 :)