[ICLR 2022] VOS : Learning What You Don't Know By Virtual Outlier Synthesis
Outlier Synthesis
목록 보기
1/3
VOS : Learning What You don’t Know By Virtual Outlier Synthesis
https://arxiv.org/abs/2202.01197
은 ICLR 2022에서 발표된 논문으로, virtual outlier를 만들어 내는 것으로 OODD문제를 해결하는 방법을 제안합니다.
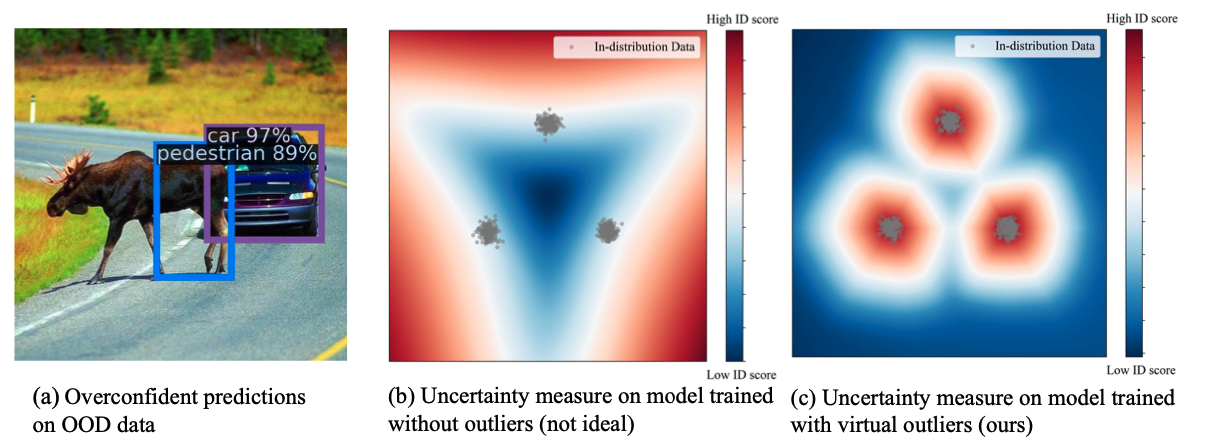
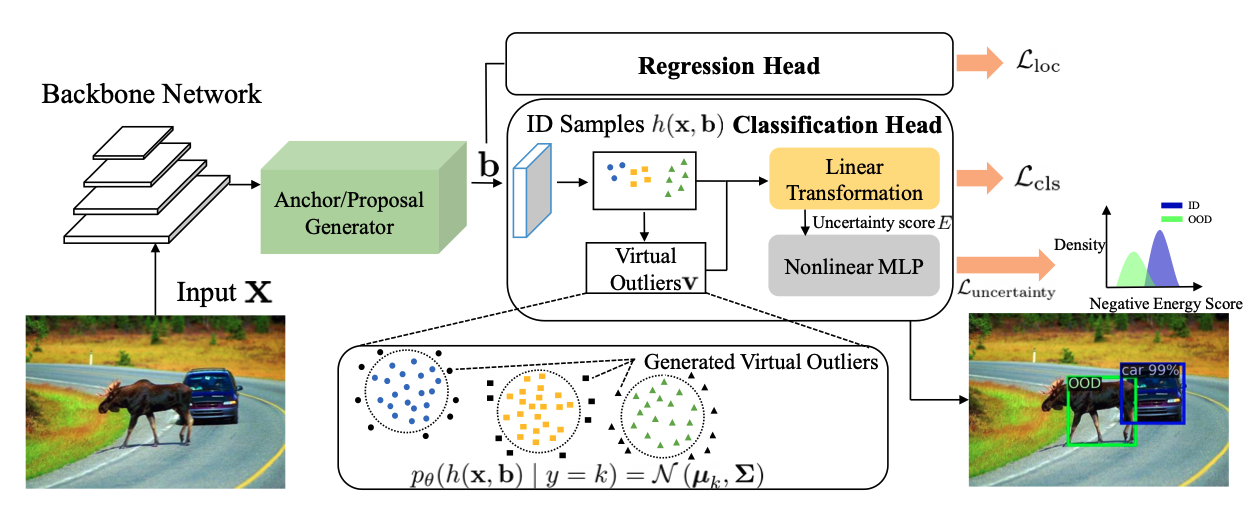
구체적으로 기존의 방법과는 다르게 pixel space가 아닌 feature space에서 class-conditional distribution의 low-likelihood region으로부터 샘플링을 진행함으로써 decision boundary 영역을 의미있게 regularizae할 수 있음을 주장하고 있습니다.
더불어,ID와 Synthesis outlier data 사이의 uncertainty space형성을 잘 대비될 수 있도록 하는 새로운 unknown aware training objective를 제안합니다.
이전에 소개드렸던 NPOS, DREAMOOD의 기반이 되는 연구이며, NPOS와 DREAMOOD의 objective가 여기서 제안된 것을 사용한 것으로 확인됩니다.
샘플링 매커니즘은 아래와 같이 진행됩니다.
- object instances(편하게 이미지라고 생각하셔도 될 것 같습니다)의 feature representation을 class-conditional multivariate Gaussian distribution이라고 가정 합니다. (NPOS에서 VOS가 strong and restrictive assumption that might not hold in reality 라고 하면서 Non-parametric한 방법을 주장)
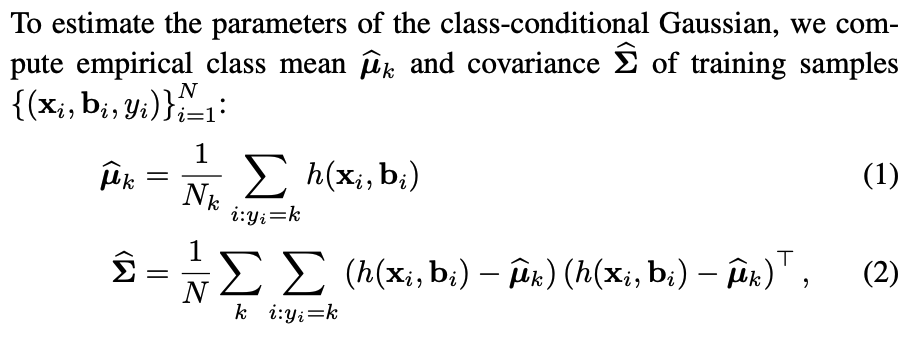
- 이렇게 가정하고 나서, 각 Class conditional Gaussian의 means과 covariance를 training sample로 부터 구해줍니다.
- 각각의 training sample로부터 구한 Guassian 분포로부터, 샘플을 뽑는데, 이 때 특정 threshold보다 낮은 likelihood를 가질 경우에만 sample로 채택합니다. 이를 통해 class boundary 주변의 샘플을 outlier로 샘플링함으로써, decision boundary를 잘 형성할 수 있도록 만듦.
Outlier와 ID를 구분해주는 objective는 NPOS와 DreamOOD와 같이 MLP를 사용해 BCE를 적용한 것으로 확인되며, 여기서는 Inference시에 직접적으로 MLP layer를 사용하여 OODD을 진행한 것으로 보입니다.


살아남은 자가 강한 것