📰 오늘의 기사
- 제목 : OpenClaw가 보여준 로컬 실행 아키텍처의 전환점
- 출처 : 요즘 IT
- 기사 링크 : https://yozm.wishket.com/magazine/detail/3649/
📖 기사 핵심 요약
- OpenClaw는 클라우드 중심이 아닌 로컬 실행형 AI 에이전트 플랫폼이다.
- 이 플랫폼은 사용자의 PC에서 직접 실행되며, 외부 서버에 데이터를 전송하지 않고 AI를 동작시킬 수 있는 구조를 지닌다.
- OpenClaw는 hub-and-spoke 아키텍처와 WebSocket 기반 통신을 통해 다양한 메시징 채널과 연동된다.
- 단순 챗봇이 아니라 도구와 스킬 구조를 통해 파일, 브라우저, 쉘, 메시징 등 다양한 시스템 리소스와 상호작용하는 행동형 AI로 설계되었다.
- OpenClaw는 다음과 같은 구성 요소로 이루어져 있다.
- 게이트웨이: 컨트롤 플레인
- 채널: 메시징 플랫폼 인터페이스
- 에이전트와 에이전트 러너
- 에이전트는 도구(tool)와 스킬(skill)을 조합하여 반복 작업, 자동화, 브라우저 조작, 데이터 처리 등 실질적인 작업을 수행할 수 있다.
- 보안적으로는 OS권한을 가진 '실행AI'이기에 위험이 존재한다. 의도치 않은 파일 삭제 등 이 발생할 수 있다.
- 때문에 단말기 중심 보안이 중요하다.
🔑 주요 키워드 정리
1️⃣ 컨트롤 플레인(Control Plane)
네트워크나 분산 시스템에서 트래픽이 이동하는 경로를 결정하고, 네트워크 장비의 동작을 관리 및 제어하는 "두뇌" 역할을 하는 계층
2️⃣ 컨트롤 플레인(Control Plane)
네트워크나 분산 시스템에서 트래픽이 이동하는 경로를 결정하고, 네트워크 장비의 동작을 관리 및 제어하는 "두뇌" 역할을 하는 계층
3️⃣ 에이전트(Agent)
워크스페이스, 세션 히스토리, 모델 설정, 정책 등을 포함하는 논리적 단위로, AI의 기억과 성격을 정의하는 계층(즉, AI의 기억과 성격을 정의하는 계층)
4️⃣ 에이전트 러너(Agent Runner)
실제 LLM 실행과 도구 호출을 담당 (이 구조는 보안 통제와 확장성을 동시에 확보하는 데 유리)
💡 나의 생각
기사를 찾아보다 우연히 OpenClaw라는 기술을 접하게 되었다. 정확히 어떤 기능을 하는지 몰랐기에 이번 기사를 통해 조금 더 알아보고자 했다. OpenClaw의 가장 큰 특징은 일반적인 클라우드 기반 AI 서비스(SaaS)와 달리 로컬 환경에서 실행되는 AI 에이전트라는 점이다. 단순히 텍스트를 생성하는 데 그치지 않고, 실제 컴퓨터에서 행동을 수행하도록 설계된다는 점이 특히 흥미로웠다.
읽으면서 개인적으로 가장 인상 깊었던 문장은 “LLM은 두뇌일 뿐, 행동하려면 도구가 필요하다”는 표현이었다. 어렴풋이 알고 있었던 개념이었지만, 이렇게 명확하게 문장으로 접하니 LLM 구조에 대한 이해가 더 확실해진 느낌이었다.
기사의 핵심은 ‘도구(Tools)’와 ‘스킬(Skills)’로 요약할 수 있을 것 같다.
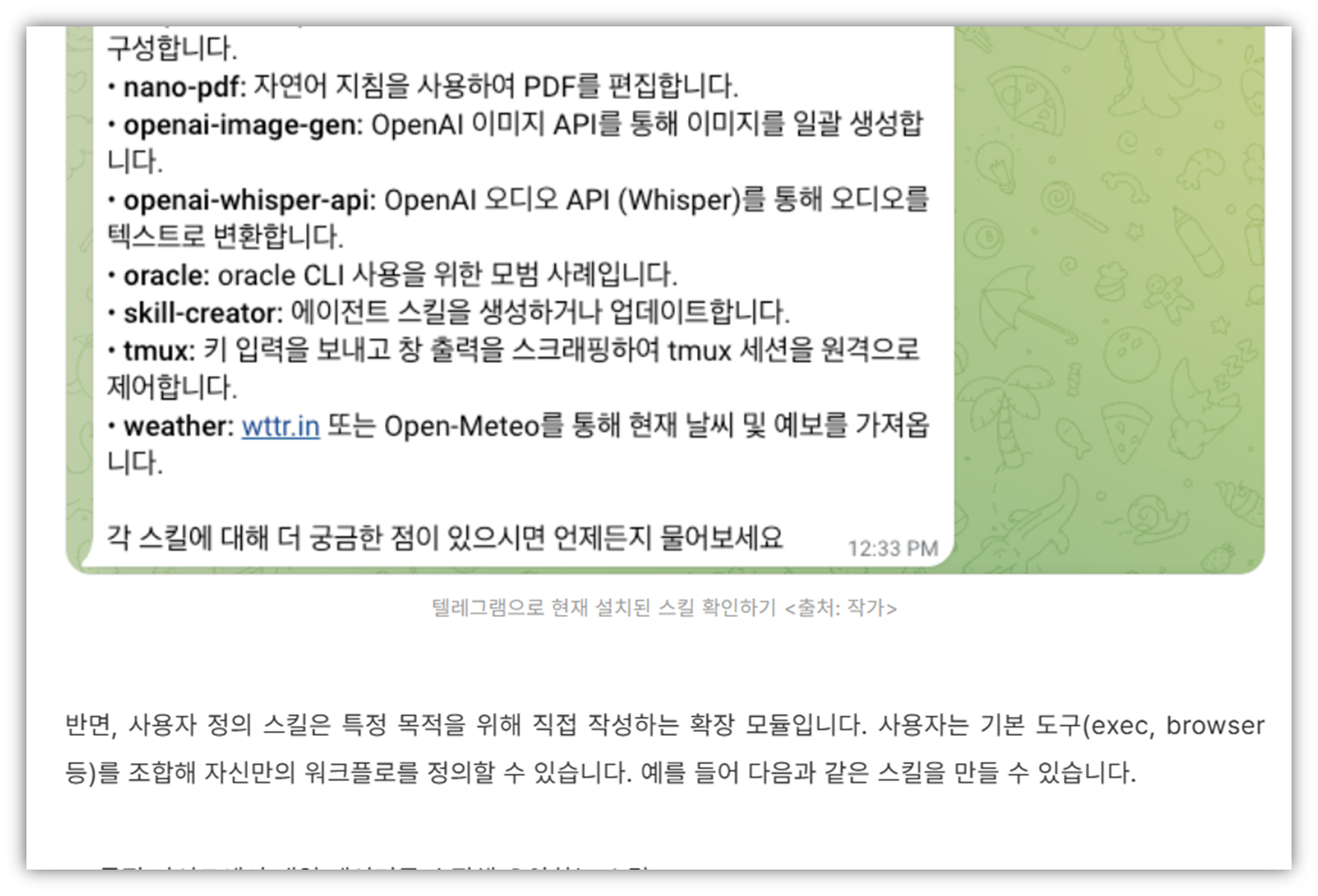
도구는 API 호출, 쉘 명령 실행, 파일 읽기/쓰기 등 AI가 외부 환경과 상호작용할 수 있도록 하는 인터페이스이고, 스킬은 이러한 도구들을 조합해 특정 목적을 수행하는 일종의 실행 템플릿이다. 예를 들어 nano-pdf, mcpoter 같은 스킬은 특정 기능을 자동화하기 위해 만들어진 대표적인 사용자 정의 스킬들이다.
아직 OpenClaw를 직접 설치해보진 못했지만, 앞으로 실습을 통해 실제로 사용해보고 싶다. 아침 뉴스 요약을 받아보거나, 웹 검색 및 데이터 크롤링을 자동화하는 등 일상 작업을 보조하는 방식으로 활용하면 매우 유용할 것 같다.