<RBL → PBL → SPL → U-Boot → Kernel 부팅 과정>
```objectivec
전원 ON
│
▼
┌──────────────────────────────┐
│ RBL (ROM Boot Loader) │
│ - SoC 내부 Mask ROM에 고정 │
│ - 부팅모드핀 확인 │
│ - SD카드 0번 섹터에서 PBL 읽기│
└──────────────────────────────┘
│ (칩 내부 SRAM/IRAM에 로드)
▼
┌──────────────────────────────┐
│ PBL (Primary Boot Loader) │
│ - SD/eMMC/NAND 컨트롤러 초기화│
│ - SPL 위치로 이동하여 읽기 │
└──────────────────────────────┘
│ (칩 내부 SRAM/IRAM → DDR 또는 IRAM)
▼
┌──────────────────────────────┐
│ SPL (Secondary Program Loader)│
│ - DDR 초기화 │
│ - SD카드/플래시에서 U-Boot 본체│
│ (u-boot.bin) 읽기 │
└──────────────────────────────┘
│ (DDR에 로드)
▼
┌──────────────────────────────┐
│ 메인 U-Boot │
│ - 환경변수 로드 │
│ - 커널(Image) + DTB 로드 │
│ - bootargs 전달 │
└──────────────────────────────┘
│ (DDR에 커널 + DTB 로드)
▼
┌──────────────────────────────┐
│ Linux 커널 │
│ - RootFS 마운트 │
│ - 사용자 공간 실행 │
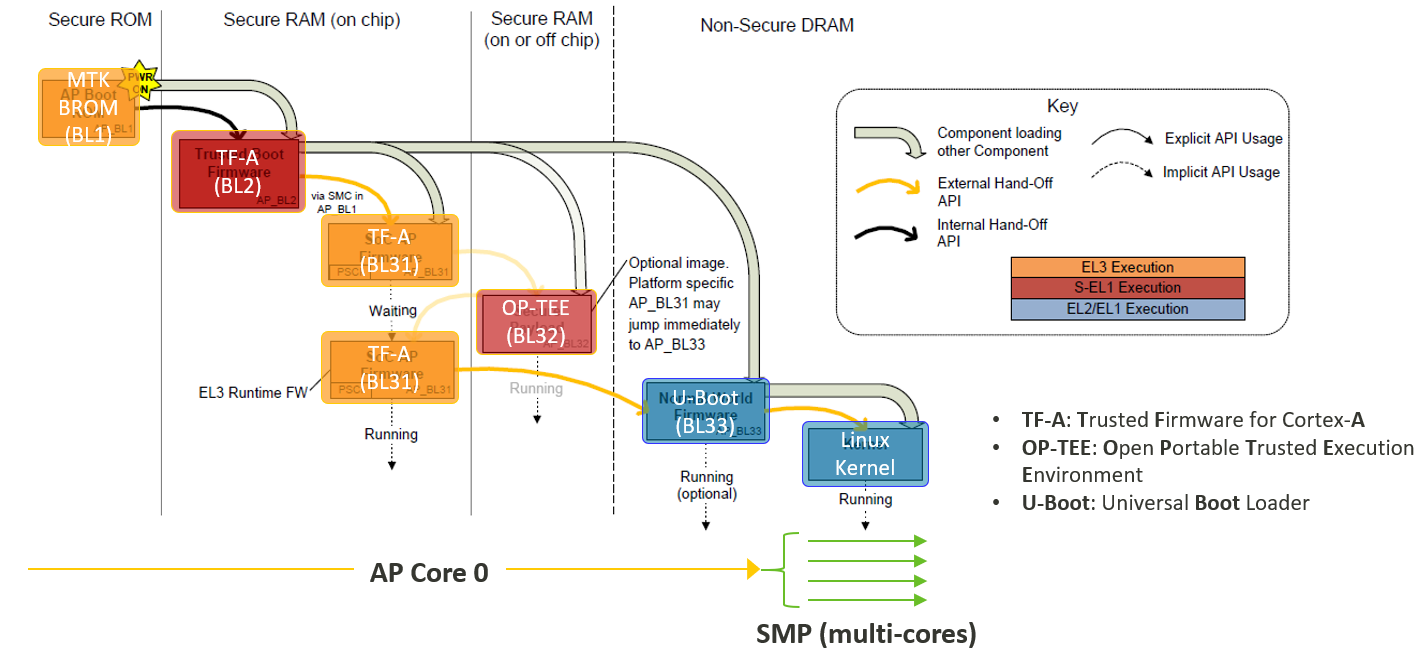
└──────────────────────────────┘1.1.1 전체 그림 잡기
- U-Boot란?
- 오픈 소스 부트로더로 시스템이 전원이 인가되거나 리셋될 때 가장 먼저 실행되는 코드
- 하드웨어 초기화. 시스템 클럭 설정, 메모리 제어, Kernel을 메모리에 로드하고 실행하는 역할
- 부트로더의 역할
- 전원 켜짐 → SoC의 ROM 코드 실행 → 1차 부트로더(SPL) → 2차 부트로더(U‑Boot) → 커널 로드
- U‑Boot이 하는 일
- 하드웨어 초기화 (DRAM, 클럭, GPIO, 시리얼 콘솔, 저장장치 인터페이스)
- 커널 이미지/디바이스 트리 로드
- 환경변수에 따라 부팅 시나리오 결정
- 네트워크/TFTP 부팅, MMC/eMMC 부팅 등 다양한 부팅 방식 지원
+) “U‑Boot Overview”
https://docs.u-boot.org/en/latest/
1.1.2 보드별 부팅 흐름 이해
- start.S
- CPU 아키텍처 초기화 (레지스터, 스택, 캐시, MMU)
- 보드에 맞는 low-level init 실행
- board_init_f() → board_init_r()
- DRAM 설정, 시리얼, 클럭 초기화
- 스토리지(MMC/NAND/SPI) 드라이버 초기화
- SPL (Secondary Program Loader)
- 메모리가 없는 환경에서 최소한의 코드로 DRAM 세팅 후 U‑Boot 본체 로드
- 환경변수(bootcmd, bootargs) 읽어서 커널 로딩
+) arch/arm/cpu/ + board/<vendor>/<board> 디렉토리 코드를 직접 열어보기
1.1.3 커맨드·환경변수 익히기
printenv→ 현재 환경변수 보기setenv bootcmd '...'→ 부팅 명령 변경saveenv→ 변경 저장help→ 사용 가능한 커맨드 목록mmc list,fatls,load등 저장장치 명령tftpboot,ping등 네트워크 부팅 관련 명령
+) 실제 보드에서 printenv와 부팅 로그를 비교하면서 bootcmd → 실행된 명령 흐름을 추적하는 게 효과적.
1.1.4 빌드와 포팅
- U‑Boot 빌드
make CROSS_COMPILE=arm-linux-gnueabihf- <board>_defconfig make CROSS_COMPILE=arm-linux-gnueabihf- - Device Tree 연계
- 커널이 이해할 수 있는 하드웨어 정보를 부팅 전에 준비
- 포팅 시 수정 포인트
board.c,Kconfig,MAINTAINERS,Makefile- 메모리 맵, 핀 설정, 클럭 트리
Embedded Junior Developer